Gazebo仿真运行
 gazebo问题记录和运行测试
gazebo问题记录和运行测试
一、快速上手教程
1.下载编译
git clone --recursive https://github.com/fishros/fishbot.git -b humble cd fishbot colcon build
2.运行测试
在RVIZ中显示机器人模型source install/setup.bash
ros2 launch fishbot_description display_rviz2.launch.py
3.仿真
source install/setup.bash
ros2 launch fishbot_description gazebo.launch.py
4.建图
source install/setup.bash
ros2 launch fishbot_cartographer cartographer.launch.py
5.Nav2
source install/setup.bash
ros2 launch fishbot_navigation2 navigation2.launch.py use_sim_time:=True
二、错误分析:
1. 没有进入工作空间
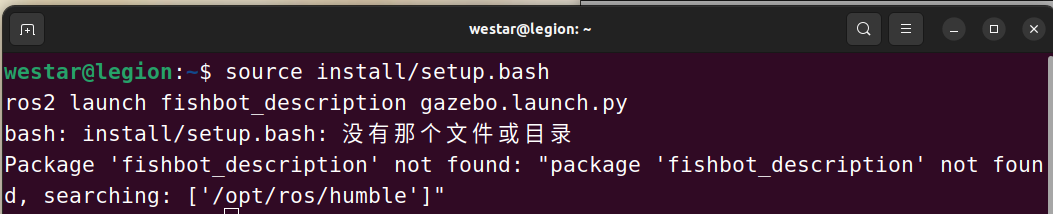
解决办法:

2.没有设置路径

解决办法通上。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号