


状态机-阶段1 练习2
题目:

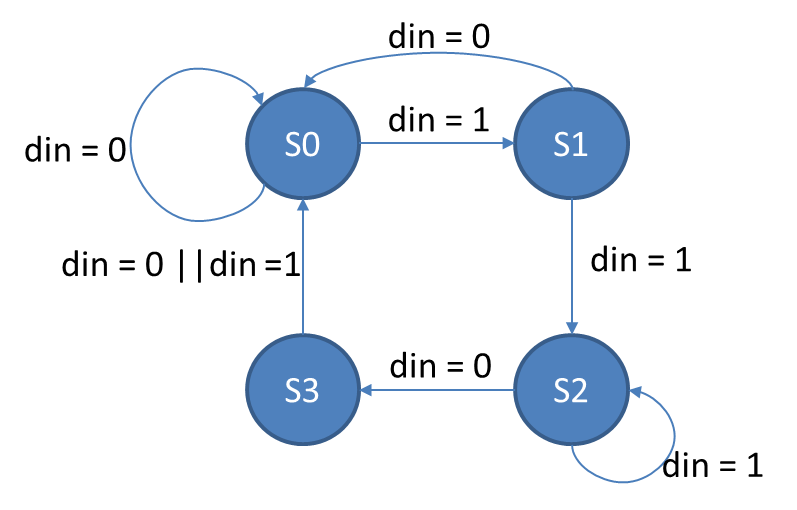
状态机图:

代码:
1 //检测序列1101 2 module state_test( 3 clk, 4 rst_n, 5 din, 6 dout 7 ); 8 9 parameter S0 = 3'b000; 10 parameter S1 = 3'b001; 11 parameter S2 = 3'b010; 12 parameter S3 = 3'b100; 13 14 input clk ; 15 input rst_n ; 16 input din ; 17 output dout ; 18 19 reg dout ; 20 reg [3-1:0] state_c ; 21 reg [3-1:0] state_n ; 22 23 24 wire S02S1_start; 25 wire S12S2_start; 26 wire S12S0_start; 27 wire S22S3_start; 28 wire S32S0_start; 29 30 //第一段,状态跳转 31 always @(posedge clk or negedge rst_n)begin 32 if(!rst_n)begin 33 state_c <= S0; 34 end 35 else begin 36 state_c <= state_n; 37 end 38 end 39 40 //第二段:组合逻辑always模块,描述状态转移条件判断 41 always @(*)begin 42 case(state_c) 43 S0:begin 44 if(S02S1_start)begin 45 state_n = S1; 46 end 47 else begin 48 state_n = state_c; 49 end 50 end 51 52 S1:begin 53 if(S12S2_start)begin 54 state_n = S2; 55 end 56 else if(S12S0_start)begin 57 state_n = S0; 58 end 59 else begin 60 state_n = state_c; 61 end 62 end 63 64 S2:begin 65 if(S22S3_start)begin 66 state_n = S3; 67 end 68 else begin 69 state_n = state_c; 70 end 71 end 72 73 S3:begin 74 if(S32S0_start)begin 75 state_n = S0; 76 end 77 else begin 78 state_n = state_c; 79 end 80 end 81 82 default:begin 83 state_n = S0; 84 end 85 endcase 86 end 87 88 //第三段:设计转移条件 89 assign S02S1_start = state_c == S0 && din == 1; 90 assign S12S2_start = state_c == S1 && din == 1; 91 assign S12S0_start = state_c == S1 && din == 0; 92 assign S22S3_start = state_c == S2 && din == 0; 93 assign S32S0_start = state_c == S3 && (din == 1 || din == 0); 94 95 //第四段,设计输出 96 always @(posedge clk or negedge rst_n)begin 97 if(!rst_n)begin 98 dout <= 0; 99 end 100 else if(state_c == S3 && din == 1)begin //S32S0_start && din == 1 101 dout <= 1; 102 end 103 else begin 104 dout <= 0; 105 end 106 end 107 108 endmodule
测试代码:
1 module state_sim; 2 3 reg clk; 4 reg rst_n; 5 reg din; 6 7 wire dout; 8 9 parameter CLK_CYCLE = 10; 10 11 initial begin 12 clk = 0; 13 forever begin 14 #(CLK_CYCLE/2); 15 clk = ~clk; 16 end 17 end 18 19 initial begin 20 rst_n = 0; 21 #1; 22 #(CLK_CYCLE*5); 23 rst_n = 1; 24 end 25 26 initial begin 27 #1; 28 din = 0; 29 #(CLK_CYCLE*10); 30 din = 1; 31 #(CLK_CYCLE); 32 33 din = 0; 34 #(CLK_CYCLE); 35 36 din = 0; 37 #(CLK_CYCLE); 38 39 din = 1; 40 #(CLK_CYCLE); 41 42 din = 0; 43 #(CLK_CYCLE); 44 45 din = 0; 46 #(CLK_CYCLE); 47 48 din = 1; 49 #(CLK_CYCLE); 50 51 repeat(100)begin 52 din = $urandom_range(0,1); 53 #(CLK_CYCLE); 54 end 55 end 56 57 state_test u1_inist( 58 .clk(clk), 59 .rst_n(rst_n), 60 .din(din), 61 .dout(dout) 62 ); 63 64 endmodule
仿真波形:

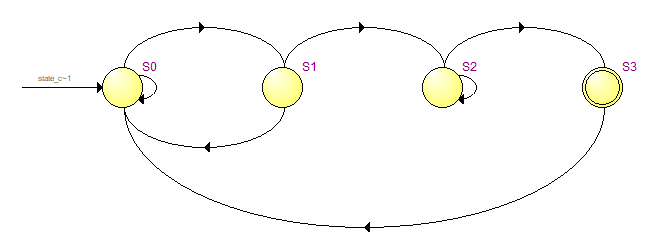
Quartus 软件自动生成的状态图:
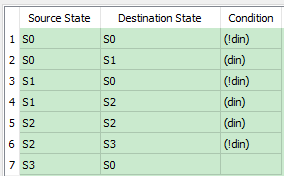
条件转移:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号