
随笔分类 - 视觉SLAM
摘要:VINS中的边缘化 1. 边缘化回顾 1.1 感性回顾-无公式 \(\quad\)首先来看一些VINS中维护的状态变量:是由para_Pose(6维,相机位姿); para_SpeedBias(9维,相机速度、加速度偏置、角速度偏置)、para_Ex_Pose(6维,相机IMU外参)、para_Fe
阅读全文
摘要:VINS中的滑动窗口 1. 图优化模型的概括 有如下优化系统 \[\begin{array}{l} \boldsymbol{\xi}=\underset{\boldsymbol{\xi}}{\operatorname{argmin}} \frac{1}{2} \sum_{i}\left\|\math
阅读全文
摘要:VINS中的IMU因子(一) 在这篇文章中我们分析一些VINS中对于IMU因子的处理和构建方式。首先来看一下再 estimator类中关于预积分因子的几个重要成员变量。pre_integrations 存储了滑动窗口中相邻两帧之间的预积分增量。acc_0,gyr_0则保存了当前时刻的角速度和加速度值
阅读全文
摘要:# 从高斯分布到信息矩阵 > 本文章的所有证明推导均为个人记录,如有错误欢迎指出,且所有均参考贺一家博士和高翔博士的相关证明,其他的部分参考文献也在文末给出。 [TOC] ## 1. SLAM 问题概率建模 考虑某个状态 $\boldsymbol{\xi}$ ,以及一次与该状态相关的观测 $\mat
阅读全文
摘要:# VINS中的重力-尺度-速度初始化(2) ## 细化重力 $\quad$上一篇文章中得到的 $g$ 一般是存在误差的。因为在实际应用中,当地的重力向量的模一般是已知固定大小的(所以只有两个自由度未知),而我们在前面求解时并没有利用这个条件,因此最后计算出来的重力向量很难刚好满足这个条件。于是,在
阅读全文
摘要:# VINS中速度-重力-尺度初始化 $\quad$在 VINS 中初始化中,需要对初始化帧的速度变量,重力,以及尺度因子进行初始化。则需要估计的变量为 $$ \mathcal{X}_{I}^{3(n+1)+3+1}=\left[v_{b_{0}}^{b_{0}}, v_{b_{1}}^{b_{1}
阅读全文
摘要:# VINS 中的旋转外参初始化 为了使这个两个传感器融合,我们首先需要做的事情是将两个传感器的数据对齐,除了时间上的对齐,还有空间上的对齐。空间上的对齐通俗的讲就是将一个传感器获取的数据统一到另一个传感器的坐标系中,其关键在于确定这两个传感器之前的外参,本文将详细介绍 `VINS_Mono`
阅读全文
摘要:# Ceres 求解 Powell’s function 的最小化 $\quad$现在考虑一个稍微复杂一点的例子—鲍威尔函数的最小化。 $\quad{}$ $x=[x_1,x_2,x_3,x_4]$ 并且 $$ \begin{array}{l} f_{1}(x)=x_{1}+10 x_{2} \\
阅读全文
摘要:# 拟合问题 [TOC] ## 1.0 线性最小二乘的几种解法 ### 1.1 基于特征值的解法 $\quad$特征值解法 代数意义上的线性最小二乘是指给定矩阵 $\boldsymbol{A} \in \mathbb{R}^{m \times n}$ ,计算 $ \boldsymbol{x}^{*}
阅读全文
摘要:# IMU 积分进行航迹推算 > **Reference** [https://github.com/gaoxiang12/slam_in_autonomous_driving](https://github.com/gaoxiang12/slam_in_autonomous_driving) ##
阅读全文
摘要: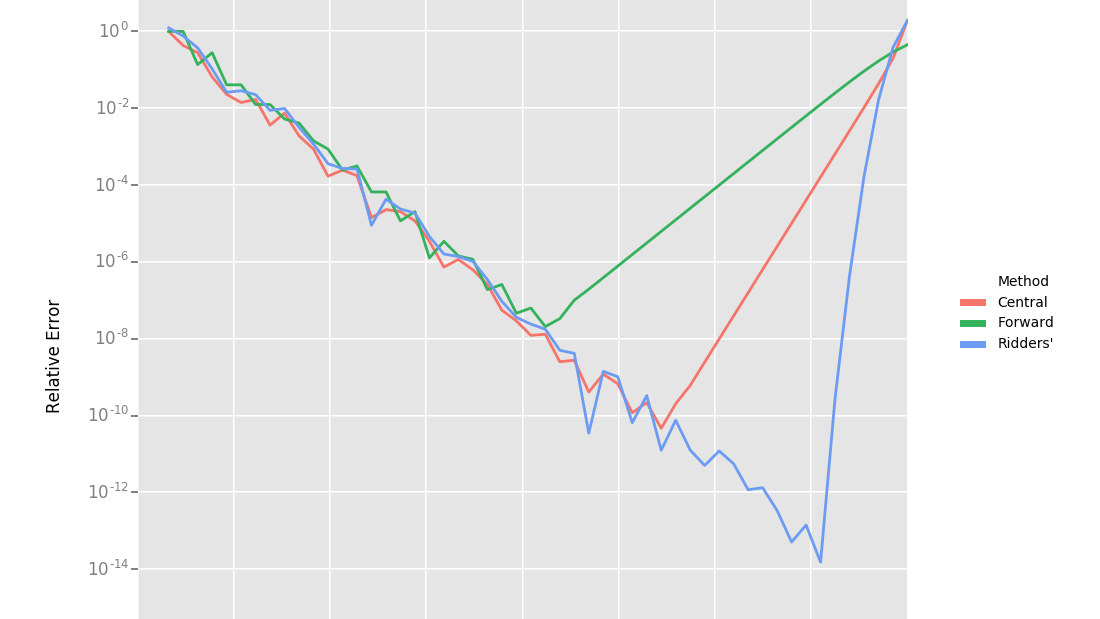 Ceres 自动求导解析-从原理到实践 1.0 前言 Ceres 有一个自动求导功能,只要你按照Ceres要求的格式写好目标函数,Ceres会自动帮你计算精确的导数(或者雅克比矩阵),这极大节约了算法开发者的时间,但是笔者在使用的时候一直觉得这是个黑盒子,特别是之前在做深度学习的时候,神经网络本事是
阅读全文
Ceres 自动求导解析-从原理到实践 1.0 前言 Ceres 有一个自动求导功能,只要你按照Ceres要求的格式写好目标函数,Ceres会自动帮你计算精确的导数(或者雅克比矩阵),这极大节约了算法开发者的时间,但是笔者在使用的时候一直觉得这是个黑盒子,特别是之前在做深度学习的时候,神经网络本事是
阅读全文
Ceres 自动求导解析-从原理到实践 1.0 前言 Ceres 有一个自动求导功能,只要你按照Ceres要求的格式写好目标函数,Ceres会自动帮你计算精确的导数(或者雅克比矩阵),这极大节约了算法开发者的时间,但是笔者在使用的时候一直觉得这是个黑盒子,特别是之前在做深度学习的时候,神经网络本事是
阅读全文
摘要:VINS中关于陀螺仪零偏的初始化估计 对于窗口中得连续两帧 $b_{k}$ 和 $b_{k+1}$ ,已经从视觉SFM中得到了旋转 $q_{b_{k}}^{c_{0}}$ 和 $q_{b_{k+1}}^{c_{0}}$ ,从IMU预积分中得到了相邻帧旋转 $\hat{\gamma}^{b_{k}}{
阅读全文
摘要:奇异值分解在视觉SLAM中的应用 手稿,有时间再排版
阅读全文
摘要:视觉SLAM中的三角化 考虑某路标点 $y$ 在若干个关键帧 $k = 1, · · · , n$ 中看到。 $\mathbf{y} \in \mathbb{R}^{4}$ ,取齐次坐标。每次观测为 $\mathbf{x}{k}=\left[u{k}, v_{k}, 1\right]^{\top}$
阅读全文
摘要:如何通过数值计算的方式对VIO系统中的求导结果进行验证 验证位姿求导是否正确的C++代码 #include <eigen3/Eigen/Core> #include <eigen3/Eigen/Dense> #include <iostream> #include "sophus/se3.hpp"
阅读全文
摘要:Vins 前端中高效的去畸变的方式解析 1.0 畸变是如何产生的 $\quad$我们先来想想3D点是如何投影到图像平面的:世界坐标点经过一个外参矩阵得到相机坐标系下的位置,由于我们经常用到的是归一化平面坐标,所以这里还要各坐标除以 $Z$,之后经过一个相机内参矩阵得到图像坐标系下坐标。 $\quad
阅读全文
摘要:本质矩阵的内在性质和本质矩阵的分解 1.0 概述 $\quad$我们在前面的文章中已经分析过对极几何约束,并且详细的推导了对极几何是怎么来的,但是对其中的一些关于本质矩阵的性质,我们只是一笔代过,并没有做详细的分析,这里主要对本质矩阵的一些性质以及本质矩阵的分解结果做出详细的讨论和推导。 本质矩阵:
阅读全文
摘要:特征点法前端 $\quad$前端又称为视觉里程计 (VO),它根据相邻图像间的信息来估计出相机的运动。估计值既可作为结果输出,也可以作为初始值提供给后端来进行优化。VO 的实现,按照是否提取图像特征,分为特征点法前端和直接法前端。 1.0 特征点与特征点匹配 $\quad$如前所述,VO 的
阅读全文
摘要:非线性优化问题以及在视觉SLAM中的应用 1.0 最小二乘基础概念 定义 $\quad$ 找到一个 n 维的变量 $\mathbf{x}^{*} \in \mathbb{R}^{n}$ , 使得损失函数 $F(\mathbf{x})$ 取局部最小值: $$ F(\mathbf{x})=\frac{1
阅读全文
 浙公网安备 33010602011771号
浙公网安备 33010602011771号