会员
周边
新闻
博问
闪存
赞助商
Chat2DB
所有博客
当前博客
我的博客
我的园子
账号设置
会员中心
简洁模式
...
退出登录
注册
登录
Alex
管理
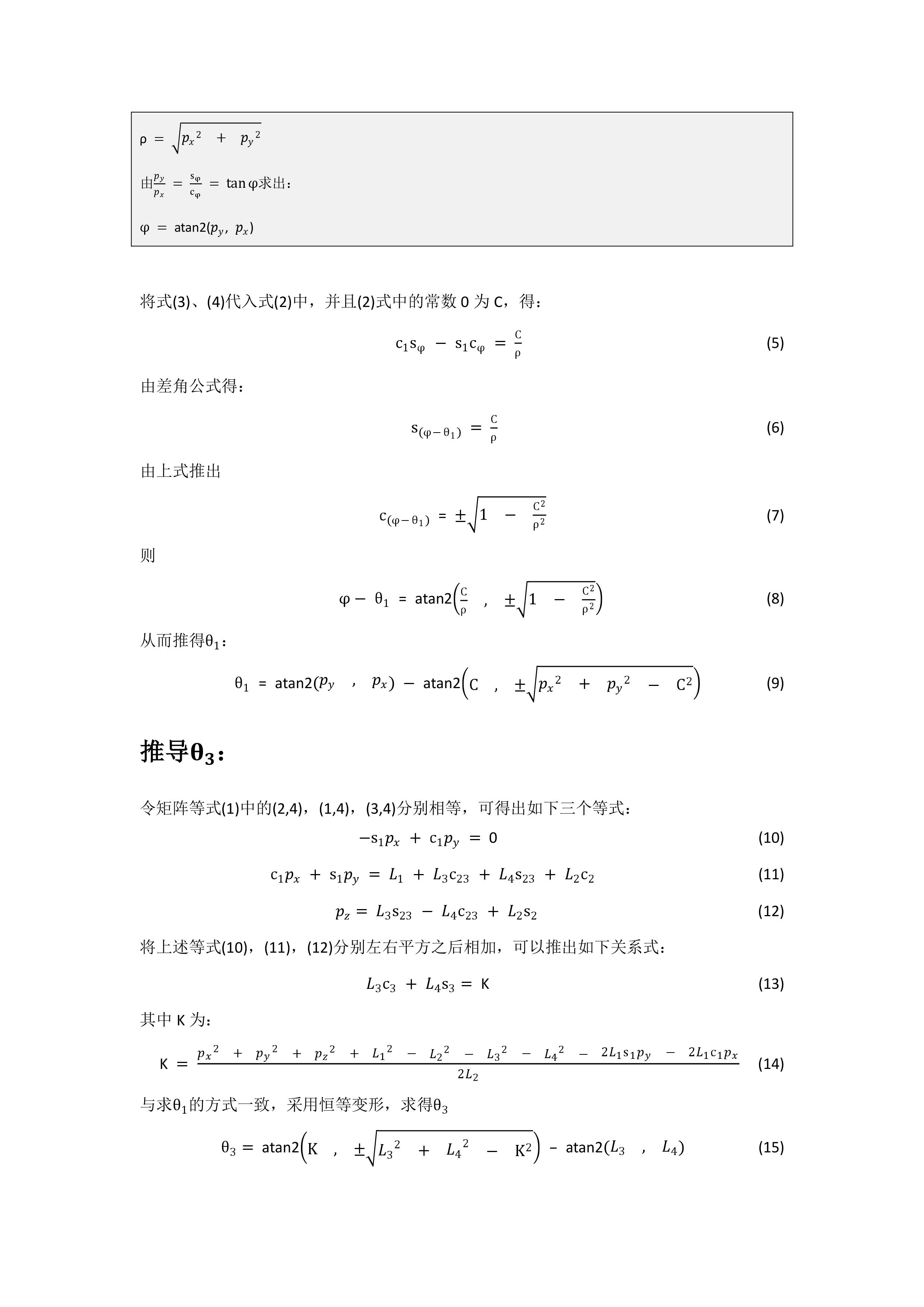
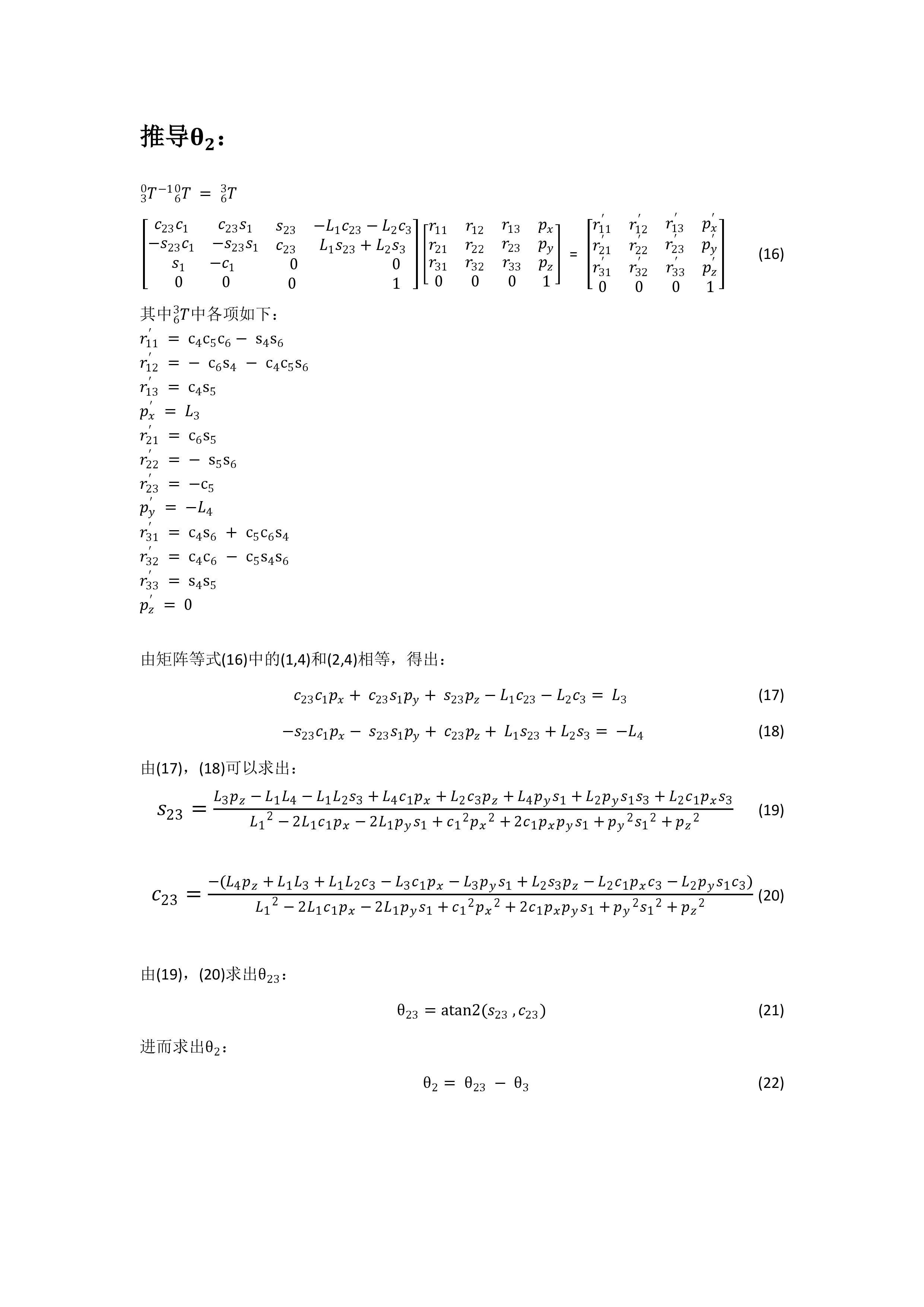
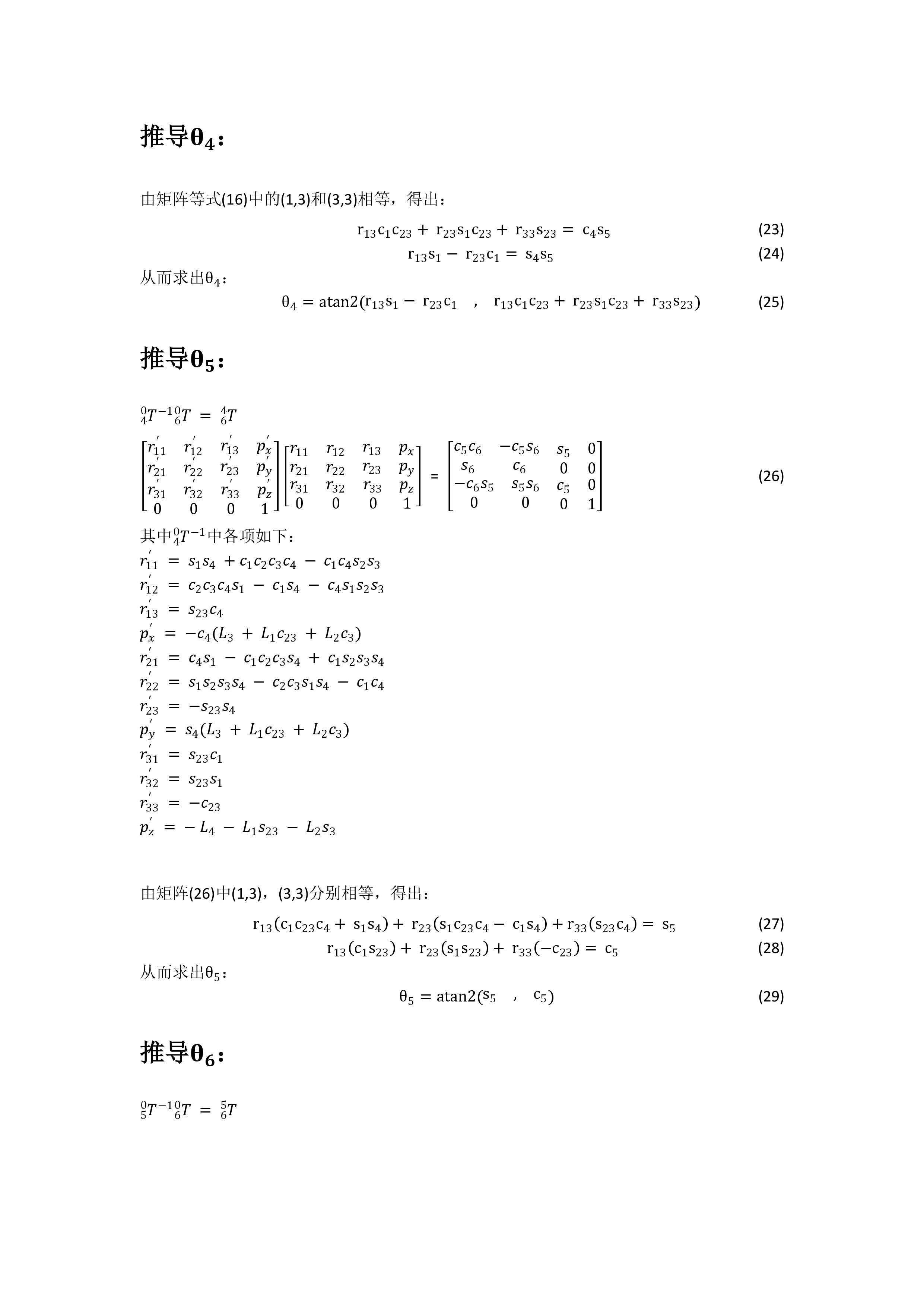
标准6轴机器人正反解(3)-反解的推导
以运动学第一篇文章中的坐标系和DH参数表为基础,可以对其反解进行推导,具体过程如下:
因公式太多,无法直接复制粘贴,故生成图片;
posted @
2019-10-30 17:58
AlexAlex
阅读(
1533
) 评论(
0
)
收藏
举报
刷新页面
返回顶部



 浙公网安备 33010602011771号
浙公网安备 33010602011771号