一、 OpenCV之图像简易处理
一、图像基本操作
1.1 图像的读取
import cv2 import numpy as np # 数据处理工具包 """ cv2.IMREAD_COLOR 彩色图像 cv2.IMREAD_GRAYSCALE 灰度图像 """ def cv_show(name, img): # 显示图片, 也可以创建多个窗口,在窗口上显示图片 cv2.imshow(name, img) # 第一个参数代表图像名称,第二个参数代表图像 # 等待时间,毫秒级, 0 代表任意终止,按任意键关闭 cv2.waitKey(0) # 关闭窗口 cv2.destroyAllWindows() # 读取彩色图片 img_color = cv2.imread("../images/cat.jpg", cv2.IMREAD_COLOR) # opencv 读取的格式是BGR, 不是RGB, 输出也是 BGR格式 cv_show("img_color", img_color) # print(img_color) # 输出像素点的矩阵 """ [[[142 151 160] [146 155 164] [151 160 170] ... [183 198 200] [128 143 145] [127 142 144]]] """ # print(type(img_color)) # <class 'numpy.ndarray'> # 获取图像的 H(高), W(宽), C(3, 代表BGR的彩色图) # print(img_color.shape) # (414, 500, 3) # 读取灰度图 img_grayscale = cv2.imread("../images/cat.jpg", cv2.IMREAD_GRAYSCALE) cv_show("img_grayscale", img_grayscale) # 获取图像的 H(高), W(宽), # print(img_grayscale.shape) # (414, 500) 灰度图只有两个结果 # 保存图片 cv2.imwrite("my_cat.png", img_grayscale) # 获取图片类型 print(type(img_grayscale)) # <class 'numpy.ndarray'> # 获取图片大小 print(img_grayscale.size) # 207000 # 获取像素点数据类型 print(img_grayscale.dtype) # uint8

import cv2 def cv_show(name, img): # 显示图片, 也可以创建多个窗口,在窗口上显示图片 cv2.imshow(name, img) # 第一个参数代表图像名称,第二个参数代表图像 # 等待时间,毫秒级, 0 代表任意终止,按任意键关闭 cv2.waitKey(0) # 关闭窗口 cv2.destroyAllWindows() img = cv2.imread("../images/cat.jpg") cv_show("source picture", img) # 截取部分图像数据 cat = img[0:50, 0:200] # 代表图片截取,长为0-50, 宽为 0-200的像素点 cv_show("split picture", cat)
""" OpenCV中,图像通常是以 NumPy数组的形式存储的,并且通常是三维的: 高度,宽度,颜色通道,对于彩色图像,通道的顺序通常是 BGR(蓝, 绿, 红) image[:, :, 0] 是一个使用NumPy数组切片来获取图像中特定通道的方法, 0代表通道的索引, 对于BGR图像,表示蓝色通道,1表示绿色通道,2代表红色通道 """ # 颜色通道截取 b, g, r = cv2.split(img) # print(len(b), b) # 414 [[142 146 151 ... 156 155 154]...]] # print(b.shape) # (414, 500), b, g, r都是一样的 img = cv2.merge((b, g, r)) # merge 可以将b, g, r重新组装成图片 print(img) print(img.shape) # (414, 500, 3) cv_show("rebuild picture", img) # 只保留 R (B, G, R) (图R) cur_img_R = img.copy() cur_img_R[:, :, 0] = 0 cur_img_R[:, :, 1] = 0 # 只保留 G (B, G, R) (图G) cur_img_G = img.copy() cur_img_G[:, :, 0] = 0 cur_img_G[:, :, 2] = 0 # 只保留 B (B, G, R) (图B) cur_img_B = img.copy() cur_img_B[:, :, 1] = 0 cur_img_B[:, :, 2] = 0 res = np.hstack((cur_img_R, cur_img_G, cur_img_B)) cv_show("res", res)

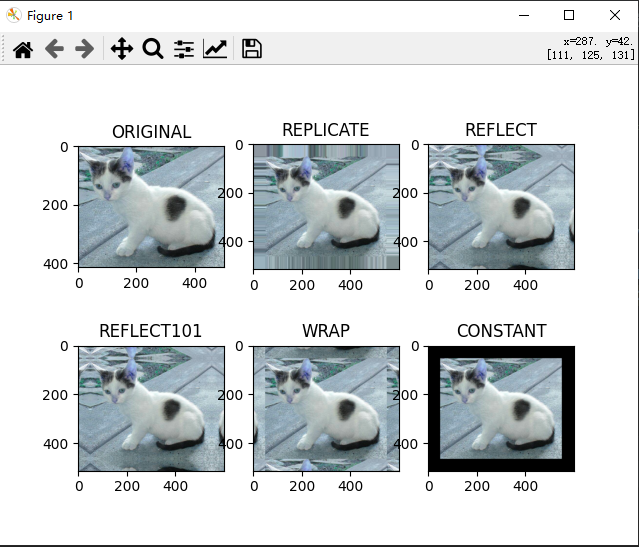
import cv2 import matplotlib.pyplot as plt def subplot(num, picture, name, title): plt.subplot(num) plt.imshow(picture, name) plt.title(title) # 上下左右各填充50 top_size, bottom_size, left_size, right_size = (50, 50, 50, 50) img = cv2.imread("../images/cat.jpg") # borderType 填充方法 """ BORDER_REPLICATE: 复制法, 也就是复制最边缘像素 BORDER_REFLECT: 反射法,对感兴趣的图像的像素在两边进行复制, 如 fedcba|abcdefgh|hgfedcb BORDER_REFLECT_101: 反射法, 也就是一最边缘像素为轴对称, 如 gfedcb|abcdefgh|gfedcba, 比上面反射优化了点 BORDER_WRAP: 外包装法 cdefg|abcdefgh|abcdefg BORDER_CONSTANT: 常量法, 常数值填充 """ replicate = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size, borderType=cv2.BORDER_REPLICATE) reflect = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size, cv2.BORDER_REFLECT) reflect101 = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size, cv2.BORDER_REFLECT_101) wrap = cv2.copyMakeBorder(img, top_size, bottom_size, left_size, right_size, cv2.BORDER_WRAP) constant = cv2.copyMakeBorder(img, top_size, bottom_size,left_size, right_size,cv2.BORDER_CONSTANT, value=0) # 0 代表黑框 subplot(231, img, "gray", "ORIGINAL") subplot(232, replicate, "gray", "REPLICATE") subplot(233, reflect, "gray", "REFLECT") subplot(234, reflect101, "gray", "REFLECT101") subplot(235, wrap, "gray", "WRAP") subplot(236, constant, "gray", "CONSTANT") plt.show()
import cv2 img_cat = cv2.imread("../images/cat.jpg") img_dog = cv2.imread("../images/dog.jpg") img_cat2 = img_cat + 10 print(img_cat[:5, :, 0]) # :5 只打印前五行 """ [[142 146 151 ... 156 155 154] [108 112 118 ... 155 154 153] [108 110 118 ... 156 155 154] [139 141 148 ... 156 155 154] [153 156 163 ... 160 159 158]] """ print(img_cat2[:5, :, 0]) """ [[152 156 161 ... 166 165 164] [118 122 128 ... 165 164 163] [118 120 128 ... 166 165 164] [149 151 158 ... 166 165 164] [163 166 173 ... 170 169 168]] """ print((img_cat + img_cat2)[:5, :, 0]) # 142 + 152 = 294 % 256 = 38 """ [[ 38 46 56 ... 66 64 62] [226 234 246 ... 64 62 60] [226 230 246 ... 66 64 62] [ 32 36 50 ... 66 64 62] [ 60 66 80 ... 74 72 70]] """ # add 函数, 越界之后就取 255 print(cv2.add(img_cat, img_cat2)[:5, :, 0]) """ [[255 255 255 ... 255 255 255] [226 234 246 ... 255 255 255] [226 230 246 ... 255 255 255] [255 255 255 ... 255 255 255] [255 255 255 ... 255 255 255]] """
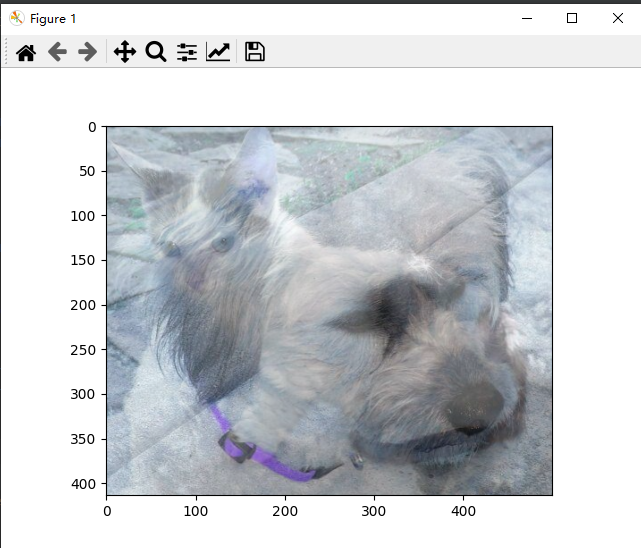
""" addWeighted(arg1, arg2, arg3, arg4, arg5) arg1: 输入图像1 arg2: 输入图像1的权重 arg3: 输入图像2 arg4: 输入图像2的权重 arg5: 可选值,默认为0 """ import cv2 import time import matplotlib.pyplot as plt img_cat = cv2.imread("../images/cat.jpg") img_dog = cv2.imread("../images/dog.jpg") print(img_cat.shape) # (414, 500, 3) print(img_dog.shape) # (429, 499, 3) # print(img_cat + img_dog) # ValueError: operands could not be broadcast together with shapes (414,500,3) (429,499,3) img_dog = cv2.resize(img_dog, (500, 414)) # print(img_dog.shape) # (414, 500, 3) res = cv2.addWeighted(img_cat, 0.4, img_dog, 0.6, 0) # 代表 ax1 + bx2 --> a, b代表权重 # plt.imshow(img_cat) # res_rgb = cv2.cvtColor(res, cv2.COLOR_BGR2RGB) # 将 BGR 转换成 RGB plt.imshow(res) plt.show()
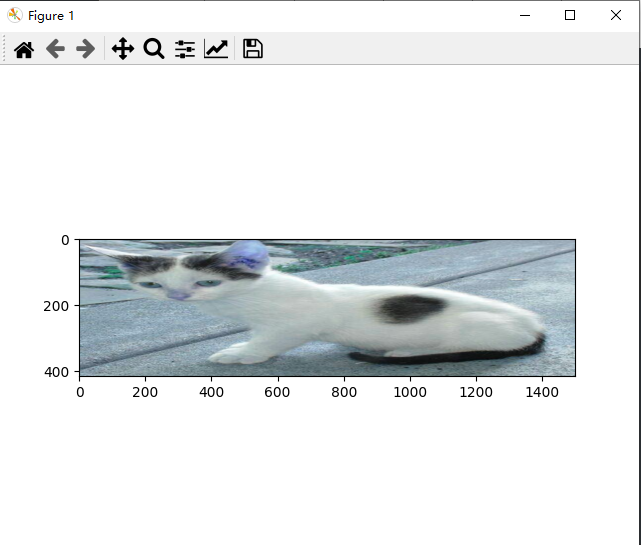
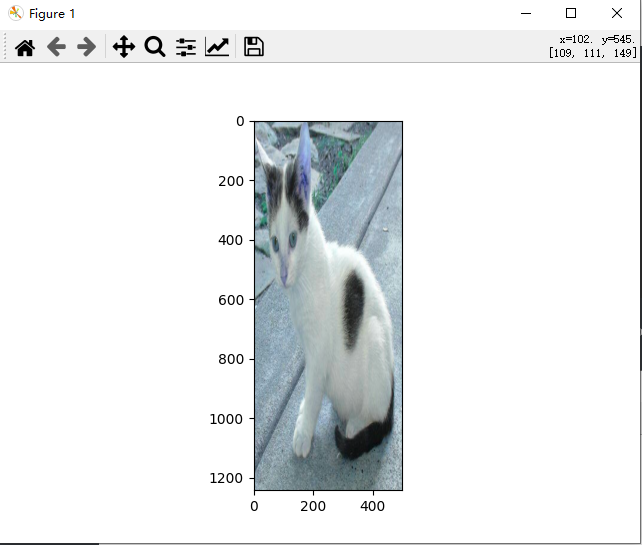
# (0, 0) 代表不指定具体数值 res = cv2.resize(img_cat, (0, 0), fx=3, fy=1) # 相当于x轴3倍, y轴1倍 plt.imshow(res) plt.show() res = cv2.resize(img_cat, (0, 0), fx=1, fy=3) # 相当于x轴1倍, y轴3倍 plt.imshow(res) plt.show()
# 视频读取为一帧一帧读取,读取的一帧数据相当于一个图片,然后按照图片的方式来处理 import cv2 vc = cv2.VideoCapture("../images/test.mp4") # print(vc) # < cv2.VideoCapture 0B6F9ED0> if vc.isOpened(): # 检查是否正常打开 openFlag, frame = vc.read() # 读取视频第一帧,返回第一个读取成功与否,第二个返回的帧图像信息 else: openFlag = False while openFlag: ret, frame = vc.read() # 每次read继续一帧一帧往下读 if frame is None: # 读完了 break if ret: gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) # 将图像转换成灰度图 cv2.imshow("result", gray) if cv2.waitKey(10) & 0xFF == 27: # 10 代表读取速度,速度越小越快, 27 代表退出键 (esc) break vc.release() cv2.destroyAllWindows()


 浙公网安备 33010602011771号
浙公网安备 33010602011771号