PID控制
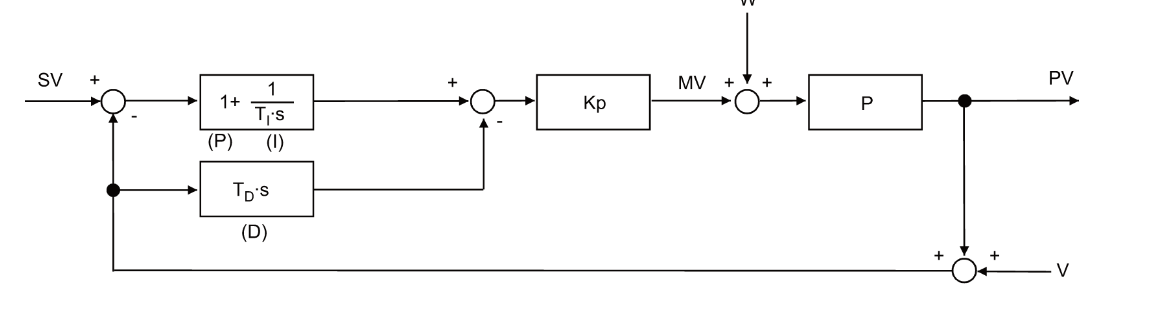
完全微分:是原样不变的使用为分享的输入的PID控制。
完全微分的PID运算块:
不完全微分:是在微分项的输入中置入一次延迟滤波器的PID控制。不完全微分在一下情况下有效。
易于受到高频噪声影响的控制的情况下
完全微分方式中,有步状变化时无法赋予使操作端动作的有效能量的情况下。
不完全微分的PID运算块:
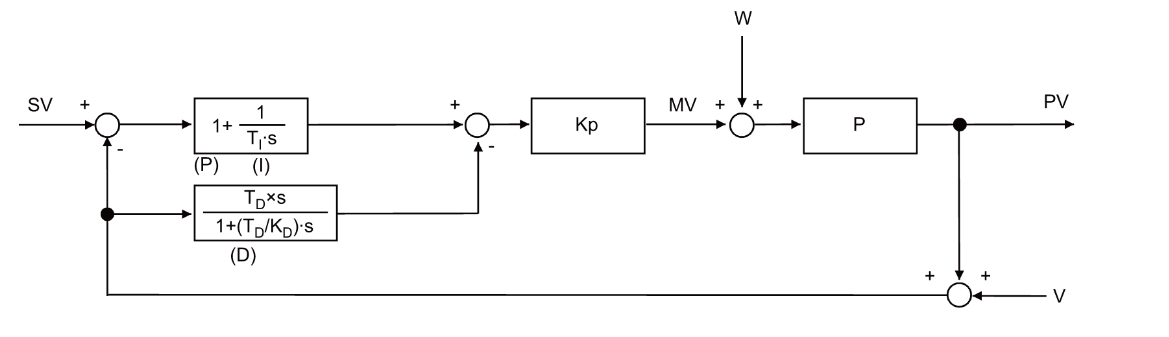
KP:增益 W:干扰 P:控制对象 V:检测杂音 SV:设定值 PV:测定值 MV:操作量
完全微分:是原样不变的使用为分享的输入的PID控制。
完全微分的PID运算块:
不完全微分:是在微分项的输入中置入一次延迟滤波器的PID控制。不完全微分在一下情况下有效。
易于受到高频噪声影响的控制的情况下
完全微分方式中,有步状变化时无法赋予使操作端动作的有效能量的情况下。
不完全微分的PID运算块:
KP:增益 W:干扰 P:控制对象 V:检测杂音 SV:设定值 PV:测定值 MV:操作量

 浙公网安备 33010602011771号
浙公网安备 33010602011771号