

yolov3源码分析keras(二)损失函数计算
一、前言
损失函数计算主要分析两部分一部分是yolo_head函数的分析另一部分为ignore_mask的生成的分析。
二、重要细节分析
2.1损失函数计算具体代码及部分分析
1 def yolo_loss(args, anchors, num_classes, ignore_thresh=.5, print_loss=False): 2 #args前三个元素为yolov3输出的预测值,后三个维度为保存的label 值 3 '''Return yolo_loss tensor 4 5 Parameters 6 ---------- 7 yolo_outputs: list of tensor, the output of yolo_body or tiny_yolo_body 8 y_true: list of array, the output of preprocess_true_boxes 9 anchors: array, shape=(N, 2), wh 10 num_classes: integer 11 ignore_thresh: float, the iou threshold whether to ignore object confidence loss 12 13 Returns 14 ------- 15 loss: tensor, shape=(1,) 16 17 ''' 18 num_layers = len(anchors)//3 # default setting 19 yolo_outputs = args[:num_layers] 20 y_true = args[num_layers:] 21 anchor_mask = [[6,7,8], [3,4,5], [0,1,2]] if num_layers==3 else [[3,4,5], [1,2,3]] 22 input_shape = K.cast(K.shape(yolo_outputs[0])[1:3] * 32, K.dtype(y_true[0])) #13*32=416 input_shape--->[416,416] 23 grid_shapes = [K.cast(K.shape(yolo_outputs[l])[1:3], K.dtype(y_true[0])) for l in range(num_layers)]#(13,13),(26,26),(52,52) 24 loss = 0 25 m = K.shape(yolo_outputs[0])[0] # batch size, tensor 26 mf = K.cast(m, K.dtype(yolo_outputs[0])) #mf为batchsize大小 27 #逐层计算损失 28 for l in range(num_layers): 29 object_mask = y_true[l][..., 4:5] # 取出置信度 30 true_class_probs = y_true[l][..., 5:]#取出类别信息 31 #yolo_head讲预测的偏移量转化为真实值,这里的真实值是用来计算iou,并不是来计算loss的,loss使用偏差来计算的 32 grid, raw_pred, pred_xy, pred_wh = yolo_head(yolo_outputs[l], 33 anchors[anchor_mask[l]], num_classes, input_shape, calc_loss=True) #anchor_mask[0]=[6,7,8] 34 pred_box = K.concatenate([pred_xy, pred_wh]) #anchors[anchor_mask[l]]=array([[ 116., 90.], 35 # [ 156., 198.], 36 # [ 373., 326.]]) 37 # Darknet raw box to calculate loss. 38 raw_true_xy = y_true[l][..., :2]*grid_shapes[l][::-1] - grid #根据公式将boxes中心点x,y的真实值转换为偏移量 39 raw_true_wh = K.log(y_true[l][..., 2:4] / anchors[anchor_mask[l]] * input_shape[::-1])#计算宽高的偏移量 40 raw_true_wh = K.switch(object_mask, raw_true_wh, K.zeros_like(raw_true_wh)) # avoid log(0)=-inf(后边有详细解释为什么这么操作) 41 box_loss_scale = 2 - y_true[l][...,2:3]*y_true[l][...,3:4] #(2-box_ares)避免大框的误差对loss 比小框误差对loss影响大 42 43 # Find ignore mask, iterate over each of batch. 44 ignore_mask = tf.TensorArray(K.dtype(y_true[0]), size=1, dynamic_size=True)#定义一个size可变的张量来存储不含有目标的预测框的信息 45 object_mask_bool = K.cast(object_mask, 'bool')#映射成bool类型 1=true 0=false 46 def loop_body(b, ignore_mask): 47 true_box = tf.boolean_mask(y_true[l][b,...,0:4], object_mask_bool[b,...,0]) #剔除为0的行 48 iou = box_iou(pred_box[b], true_box) #一张图片预测出的所有boxes与所有的ground truth boxes计算iou 计算过程与生成label类似利用了广播特性这里不详细描述 49 best_iou = K.max(iou, axis=-1)#找出最大iou 50 ignore_mask = ignore_mask.write(b, K.cast(best_iou<ignore_thresh, K.dtype(true_box)))#当iou小于阈值时记录,即认为这个预测框不包含物体 51 return b+1, ignore_mask 52 _, ignore_mask = K.control_flow_ops.while_loop(lambda b,*args: b<m, loop_body, [0, ignore_mask])#传入loop_body函数初值为b=0,ignore_mask 53 ignore_mask = ignore_mask.stack() 54 ignore_mask = K.expand_dims(ignore_mask, -1) #扩展维度用来后续计算loss 55 56 # K.binary_crossentropy is helpful to avoid exp overflow. 57 #仅计算包含物体框的x,y,w,h的损失 58 xy_loss = object_mask * box_loss_scale * K.binary_crossentropy(raw_true_xy, raw_pred[...,0:2], from_logits=True) 59 wh_loss = object_mask * box_loss_scale * 0.5 * K.square(raw_true_wh-raw_pred[...,2:4]) 60 #置信度损失既包含有物体的损失 也包含无物体的置信度损失 61 confidence_loss = object_mask * K.binary_crossentropy(object_mask, raw_pred[...,4:5], from_logits=True)+ \ 62 (1-object_mask) * K.binary_crossentropy(object_mask, raw_pred[...,4:5], from_logits=True) * ignore_mask 63 #分类损失只计算包含物体的损失 64 class_loss = object_mask * K.binary_crossentropy(true_class_probs, raw_pred[...,5:], from_logits=True) 65 #取平均值 66 xy_loss = K.sum(xy_loss) / mf 67 wh_loss = K.sum(wh_loss) / mf 68 confidence_loss = K.sum(confidence_loss) / mf 69 class_loss = K.sum(class_loss) / mf 70 loss += xy_loss + wh_loss + confidence_loss + class_loss 71 if print_loss: 72 loss = tf.Print(loss, [loss, xy_loss, wh_loss, confidence_loss, class_loss, K.sum(ignore_mask)], message='loss: ') 73 return loss
2.2 yolo_head代码分析
yolo_head主要作用是将预测出的数据转换为真实值。代码如下:
1 def yolo_head(feats, anchors, num_classes, input_shape, calc_loss=False): 2 """Convert final layer features to bounding box parameters.""" 3 num_anchors = len(anchors) # num_anchors = 3 4 # Reshape to batch, height, width, num_anchors, box_params. 5 anchors_tensor = K.reshape(K.constant(anchors), [1, 1, 1, num_anchors, 2])# [[[[[30., 61.] 6 grid_shape = K.shape(feats)[1:3] # height, width [62., 45.] 7 grid_y = K.tile(K.reshape(K.arange(0, stop=grid_shape[0]), [-1, 1, 1, 1]), # [59., 119.]]]]] 8 [1, grid_shape[1], 1, 1]) 9 grid_x = K.tile(K.reshape(K.arange(0, stop=grid_shape[1]), [1, -1, 1, 1]), 10 [grid_shape[0], 1, 1, 1]) 11 grid = K.concatenate([grid_x, grid_y]) 12 grid = K.cast(grid, K.dtype(feats)) 13 14 feats = K.reshape( 15 feats, [-1, grid_shape[0], grid_shape[1], num_anchors, num_classes + 5])#featuremap [N,13,13,3(20+5)]-->[N,13,13,3,(20+5)] 16 17 # Adjust preditions to each spatial grid point and anchor size. 18 box_xy = (K.sigmoid(feats[..., :2]) + grid) / K.cast(grid_shape[::-1], K.dtype(feats))#grid 为偏移 ,将x,y相对于featuremap尺寸进行了归一化 19 box_wh = K.exp(feats[..., 2:4]) * anchors_tensor / K.cast(input_shape[::-1], K.dtype(feats))#real box_wh 20 box_confidence = K.sigmoid(feats[..., 4:5]) 21 box_class_probs = K.sigmoid(feats[..., 5:]) 22 if calc_loss == True: 23 return grid, feats, box_xy, box_wh 24 return box_xy, box_wh, box_confidence, box_class_probs
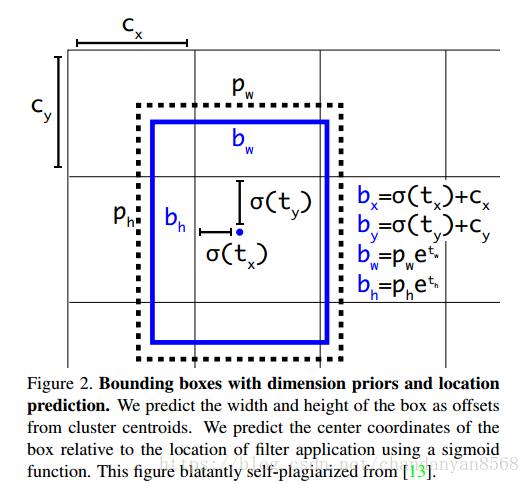
box真实值与预测值转换公式及示意图:
转换代码如下:
box_xy = (K.sigmoid(feats[..., :2]) + grid) / K.cast(grid_shape[::-1], K.dtype(feats))#grid 为偏移 box_wh = K.exp(feats[..., 2:4]) * anchors_tensor / K.cast(input_shape[::-1], K.dtype(feats))#real box_wh
对于初学者这个图也有一定的迷惑性质,可以把上图的每个网格想象成feature map上的一个点,则第一个像素对应的偏移为(0,0),第一行第二个偏移为(1,0)以此类推。图中标注的点偏移量为(1,1)。
yolo_head中转换为真实值时gride偏移相对于特征图尺寸做了归一化。
代码对于预测出的值进行了Sigmoid操作目的是为了让坐标值在0-1之间。
假设蓝色点为13*13的feature map 中的cell预测的中心点坐标为x,y,取sigmoid后其坐标为 (0.3, 0.5),则真实框在这个尺度上的中心点坐标值为(0.3+1, 0.5+1),映射到原图尺度为(1.3,1,5)*scale。
在这里scale=32。
其中grid为相对于feature map左上角的偏移量。以13*13的feature map为例来说明box 中心点x,y以及宽高w,h的计算过程。
K.arange(0, stop=grid_shape[0]) ---->[ 0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12]
K.reshape(K.arange(0, stop=grid_shape[0]), [-1, 1, 1, 1]) ----> -1表示为变化的维度,放在第一维度表示第一位维是变化的则 shape=[13,1,1,1] 一共包含13行值分别为0, 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12。
具体形式如下:[ [ [ [ 0 ] ] ]
..........
[ [ [12 ] ] ] ]
grid_y = K.tile(K.reshape(K.arange(0, stop=grid_shape[0]), [-1, 1, 1, 1]), [1, grid_shape[1], 1, 1]) ----> 表示在第二个维度重复13次 shape=[13,13,1,1]
具体形式如下:[ [ [ [ 0 ] ]
...........
[ [ 0 ] ] 重复13次
[ [ [ 1 ] ]
............
[ [ 1 ] ] 重复13次
.............
.............
[ [ [ 12 ] ]
...............
[ [12 ] ] ] ]
同理可得到grid_x的具体形式:[ [ [ [ 0 ] ] shape=[13,13,1,1]
[ [ 1 ] ]
............
[ [12 ] ] ]
.............
.............
[ [ [ [ 0 ] ] 蓝色部分共重复了13次
[ [ 1 ] ]
............
[ [ 12 ] ] ]
grid最终形式为 [ [ [ [ 0 0 ] ] shape=[13,13,1,2]
[ [ 1 0 ] ]
................
[ [12 1 ] ] ]
[ [ [ 0 1 ] ]
[ [ 1 1 ] ]
................
[ [12 1] ] ]
..................
..................
[ [ [ 0 12 ] ]
[ [ 1 12 ] ]
................
[ [12 12] ] ]
三、有关损失函数的一些注意事项
ps: 损失函数计算的为偏移量的损失,作者将真实的标签宽高转换为对应特征图尺寸上宽高的偏移量,然后与预测出的宽高偏移量计算误差。并不是将预测出的偏移转换为真实值和标签计算误差。 即计算的为偏移量的误差不是真实值之间的误差。同理中心点误差计算也是特征图上的中心点坐标。
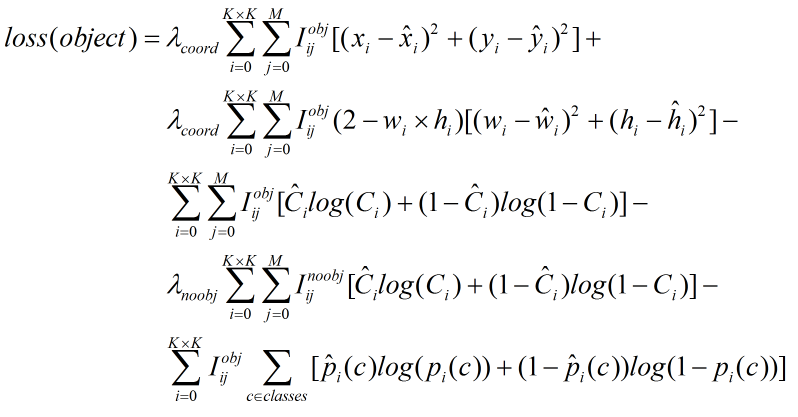
实际公式中xi,yi尖,为网络预测出的中心点值计算sigmoid之后的值。原版darknet计算中心点损失使用的是方差。keras作者使用的是交叉熵,这点有所不同。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号