
寄存器和库函数的操作
寄存器的使用
寄存器位操作
(1) 清零,
&= ~( 对应位 );原理:
x & 1 = x;x & 0 = 0(2) 置一,
|= ( 对应位 );原理:
x | 1 = 1;x | 0 = x(3) 取反,
^= ( 对应位 );原理:
x ^ 1 = ~x;x | 0 = x
寄存器位取反:可以将GPIO的 “ 端口位” 的状态反转,0 => 1; 1 => 0
IO口状态反转:
1、需要输出 0/1
2、需要反转时,寄存器ODR
^= ( )
如何操作STM32的寄存器
例如:
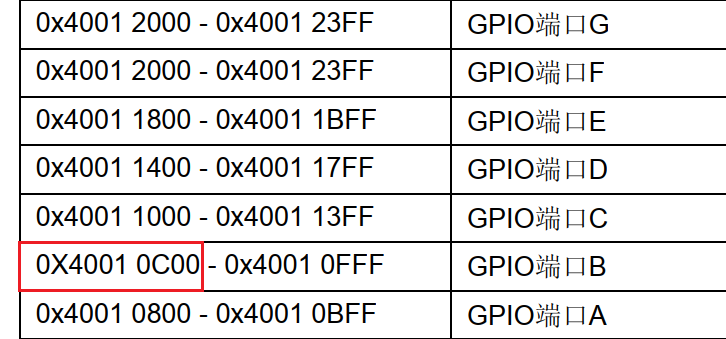
#define _GPIOB_BASE 0X40010C00 //从手册中找到GPIOB的基地址
#define GPIOB_CRL (*(unsigned int *)(_GPIOB_BASE + 0X00))
#define GPIOB_CRH (*(unsigned int *)(_GPIOB_BASE + 0X04))
#define GPIOB_IDR (*(unsigned int *)(_GPIOB_BASE + 0X08))
#define GPIOB_ODR (*(unsigned int *)(_GPIOB_BASE + 0X0C))
//(_GPIOB_BASE + 0X00),获取寄存器的“地址值”
//(unsigned int *)(_GPIOB_BASE + 0X00),将该 “地址值” 转换为32位的 “指针” 类型
//*(unsigned int *)(_GPIOB_BASE + 0X0C),*解指针,操作对应地址的 “内容”
配置代码:
//配置 GPIOB5 为 推挽输出
RCC->APB2ENR |= (0x1<<3); //开启PB时钟
GPIOB_CRL &= ~(0xF<<20);
GPIOB_CRL |= (0x3<<20); //推挽输出
GPIOB_ODR |= (0x1<<5); //PB5=1
#define LED0_PORT GPIOB
#define LED0_PIN 5
#define LED1_PORT GPIOE
#define LED1_PIN 5
#define Led_On(port, pin) (port->ODR &= ~(0x1<<pin))
#define Led_Off(port, pin) (port->ODR |= (0x1<<pin))
#define Led_Toggle(port, pin) (port->ODR ^= (0x1<<pin))
// Toggle/ˈtɒɡl/ v.切换, n.开关 将GPIO的端口位的状态反转
标准库函数
怎么添加
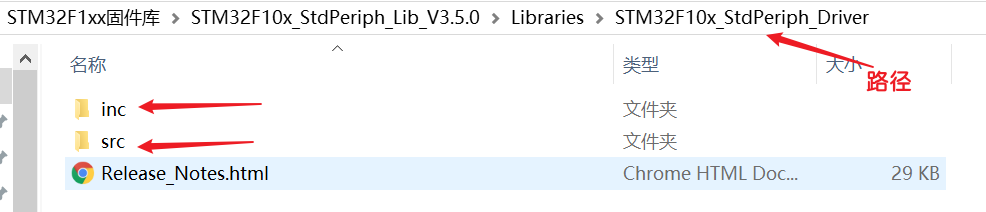
inc文件:是标准外设库函数的.h (声明) 文件。
src文件:是标准外设库函数的.c (函数实现)文件。
如何在 自己的文件夹 中使用官方的标准库
添加全局宏定义
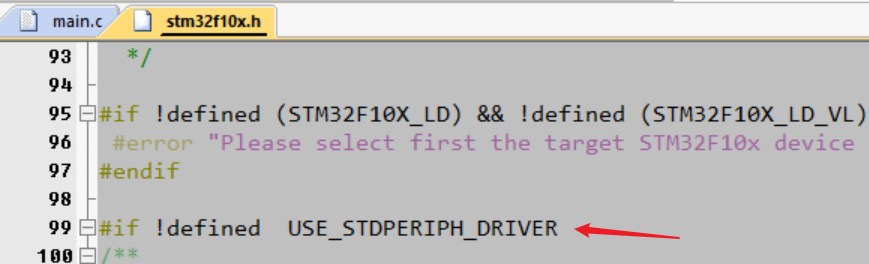
stm32f10x_conf.h:是用户使用“标准库”时,可以不用自己包含对应的“标准库文件”,会自动为你包含。打开后可以看到:
Uncomment/Comment the line below to enable/disable peripheral header file inclusion翻译:取消注释/注释下面的行以启用/禁用外围头文件包含。
优缺点
优点:方便编程,方便 控制 “ STM32上的片上外设”
//感受一下,给人一种就算不会寄存器,都会使用 片上外设
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOE, ENABLE);
//配置模式
GPIO_InitTypeDef GPIO_InitStruct; //定义结构体变量
GPIO_InitStruct.GPIO_Pin = LED0_PIN;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(LED0_PORT, &GPIO_InitStruct);
缺点:执行效率没有 “直接操作寄存器” 快,主要原因在于库函数中使用了大量的判断操作。
//库函数归根到底还是 操作寄存器,就是添加了很多的参数判断,
//判断传入的参数的正确性和对不同的参数进行的不同的操作
void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct)
{
uint32_t currentmode = 0x00, currentpin = 0x00, pinpos = 0x00, pos = 0x00;
uint32_t tmpreg = 0x00, pinmask = 0x00;
/* Check the parameters */
assert_param(IS_GPIO_ALL_PERIPH(GPIOx));
assert_param(IS_GPIO_MODE(GPIO_InitStruct->GPIO_Mode));
assert_param(IS_GPIO_PIN(GPIO_InitStruct->GPIO_Pin));
/*---------------------------- GPIO Mode Configuration -----------------------*/
currentmode = ((uint32_t)GPIO_InitStruct->GPIO_Mode) & ((uint32_t)0x0F);
if ((((uint32_t)GPIO_InitStruct->GPIO_Mode) & ((uint32_t)0x10)) != 0x00)
{
/* Check the parameters */
assert_param(IS_GPIO_SPEED(GPIO_InitStruct->GPIO_Speed));
/* Output mode */
currentmode |= (uint32_t)GPIO_InitStruct->GPIO_Speed;
}
/*---------------------------- GPIO CRL Configuration ------------------------*/
/* Configure the eight low port pins */
if (((uint32_t)GPIO_InitStruct->GPIO_Pin & ((uint32_t)0x00FF)) != 0x00)
{
tmpreg = GPIOx->CRL;
for (pinpos = 0x00; pinpos < 0x08; pinpos++)
{
pos = ((uint32_t)0x01) << pinpos;
/* Get the port pins position */
currentpin = (GPIO_InitStruct->GPIO_Pin) & pos;
if (currentpin == pos)
{
pos = pinpos << 2;
/* Clear the corresponding low control register bits */
pinmask = ((uint32_t)0x0F) << pos;
tmpreg &= ~pinmask;
/* Write the mode configuration in the corresponding bits */
tmpreg |= (currentmode << pos);
/* Reset the corresponding ODR bit */
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPD)
{
GPIOx->BRR = (((uint32_t)0x01) << pinpos);
}
else
{
/* Set the corresponding ODR bit */
if (GPIO_InitStruct->GPIO_Mode == GPIO_Mode_IPU)
{
GPIOx->BSRR = (((uint32_t)0x01) << pinpos);
}
}
}
}
GPIOx->CRL = tmpreg;
}
.......
代码编写
//宏定义,如果说不知道怎么宏定义,我可以先将函数写出来,在看看什么东西是需要更改的
#define LED0_CLK RCC_APB2Periph_GPIOB
#define LED1_CLK RCC_APB2Periph_GPIOE
#define LED0_PORT GPIOB
#define LED0_PIN GPIO_Pin_5
#define LED1_PORT GPIOE
#define LED1_PIN GPIO_Pin_5
#define Led_Off(port, pin) ( GPIO_SetBits(port, pin) )
#define Led_On(port, pin) ( GPIO_ResetBits(port, pin) )
#define Led_Toggle(port, pin) ( port->ODR ^= pin ) //需要位状态反转,此时的pin是GPIO_Pin_5,正好是 “对应位被置1” 的情况,直接 “ ^= ”,就可以得到想要的位状态反转
//使用库函数,用寄存器对IO管脚的操作,就不需要左移位了。(对寄存器的操作就是对地址的操作)
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_GPIOE, ENABLE);
//配置模式
GPIO_InitTypeDef GPIO_InitStruct; //定义结构体变量,不要定义一个空的结构体指针,结构体变量就是一个实体,不是说传递指针,就一定要定义一个指针,可以定义一个变量,取地址就是对应的指针。
GPIO_InitStruct.GPIO_Pin = LED0_PIN;
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(LED0_PORT, &GPIO_InitStruct);
GPIO_InitStruct.GPIO_Pin = LED1_PIN; //结构体变量的成员变量 只有 管脚对应的成员 发生了改变
GPIO_Init(LED1_PORT, &GPIO_InitStruct);
//灭灯
Led_Off(LED0_PORT, LED0_PIN);
Led_Off(LED1_PORT, LED1_PIN);
"我经常有那种感觉,如果这个事情来了,你却没有勇敢地去解决掉,它一定会再来。生活真是这样,它会一次次地让你去做这个功课直到你学会为止。" --《像我这样笨拙地生活》

 浙公网安备 33010602011771号
浙公网安备 33010602011771号