
pytorch中文文档-torch.nn常用函数-待添加
https://pytorch.org/docs/stable/nn.html
1)卷积层
class torch.nn.Conv2d(in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True)
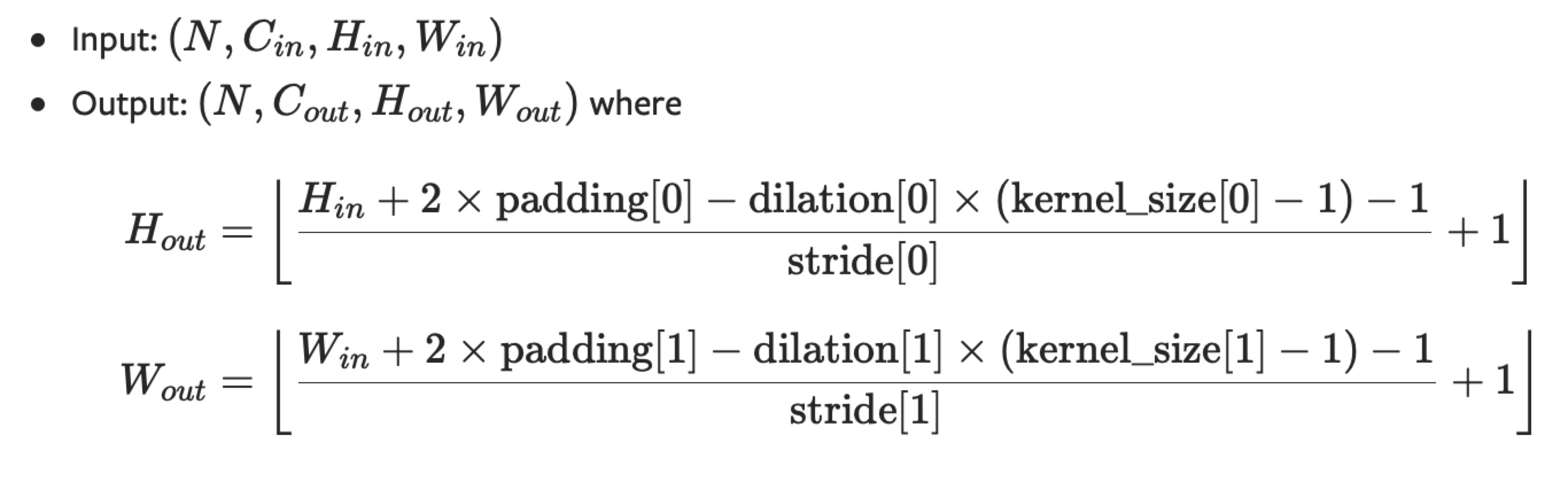
二维卷积层, 输入的尺度是(N, Cin,H,W),输出尺度(N,Cout,Hout,Wout)的计算方式:

说明
stride: 控制相关系数的计算步长dilation: 用于控制内核点之间的距离;可见pytorch的函数中的dilation参数的作用groups: 控制输入和输出之间的连接:可见pytorch的函数中的group参数的作用
group=1,输出是所有的输入的卷积;group=2,此时相当于有并排的两个卷积层,每个卷积层计算输入通道的一半,并且产生的输出是输出通道的一半,随后将这两个输出连接起来得到结果;group=in_channels,每一个输入通道和它对应的卷积核进行卷积,该对应的卷积核大小为![]()
- 参数
kernel_size,stride,padding,dilation:
- 也可以是一个
int的数据,此时卷积height和width值相同; - 也可以是一个
tuple数组,tuple的第一维度表示height的数值,tuple的第二维度表示width的数值,当是数组时,计算时height使用索引为0的值,width使用索引为1的值
Parameters:
- in_channels(
int) – 输入信号的通道 - out_channels(
int) – 卷积产生的通道 - kerner_size(
intortuple) - 卷积核的尺寸 - stride(
intortuple,optional) - 卷积步长,默认为1 - padding(
intortuple,optional) - 输入的每一条边补充0的层数,默认为0 - dilation(
intortuple,optional) – 卷积核元素之间的间距,默认为1 - groups(
int,optional) – 从输入通道到输出通道的阻塞连接数。默认为1 - bias(
bool,optional) - 如果bias=True,添加可学习的偏置到输出中
shape输出的height和width的计算式子:
变量:
weight(tensor) - 卷积的权重,大小是(out_channels, in_channels,kernel_size)
bias(tensor) - 卷积的偏置系数,大小是(out_channel)
class torch.nn.ConvTranspose2d(in_channels, out_channels, kernel_size, stride=1, padding=0, output_padding=0, groups=1, bias=True, dilation=1)
对由多个输入平面组成的输入图像应用二维转置卷积操作。
这个模块可以看作是Conv2d相对于其输入的梯度。它也被称为微步卷积(fractionally-strided convolutions)或解卷积(deconvolutions,尽管它不是一个实际的解卷积操作)。
说明
stride: 控制相关系数的计算步长 dilation: 用于控制内核点之间的距离groups: 控制输入和输出之间的连接:
group=1,输出是所有的输入的卷积;group=2,此时相当于有并排的两个卷积层,每个卷积层计算输入通道的一半,并且产生的输出是输出通道的一半,随后将这两个输出连接起来。
参数kernel_size,stride,padding,dilation数据类型:
- 可以是一个
int类型的数据,此时卷积height和width值相同; - 也可以是一个
tuple数组(包含来两个int类型的数据),第一个int数据表示height的数值,第二个int类型的数据表示width的数值
注意
由于内核的大小,输入的最后的一些列的数据可能会丢失。因为输入和输出不是完全的互相关。因此,用户可以进行适当的填充(padding操作)。
padding参数有效地将 (kernel_size - 1)/2 数量的零添加到输入大小。这样设置这个参数是为了使Conv2d和ConvTranspose2d在初始化时具有相同的参数,而在输入和输出形状方面互为倒数。然而,当stride > 1时,Conv2d将多个输入形状映射到相同的输出形状。output_padding通过在一边有效地增加计算出的输出形状来解决这种模糊性。
注意,output_padding只用于查找输出形状,但实际上并不向输出添加零填充。
output_padding的作用:可见nn.ConvTranspose2d的参数output_padding的作用
在某些情况下,当使用CUDA后端与CuDNN,该操作可能选择一个不确定性算法,以提高性能。如果不希望出现这种情况,可以通过设置torch.backends.cudnn.deterministic = True使操作具有确定性(可能要付出性能代价)。有关背景资料,请参阅有关 Reproducibility的说明。
参数:
- in_channels(
int) – 输入信号的通道数 - out_channels(
int) – 卷积产生的通道数 - kerner_size(
intortuple) - 卷积核的大小 - stride(
intortuple,optional) - 卷积步长 - padding(
intortuple,optional) - 输入的每一条边补充padding= kernel - 1 - padding,即(kernel_size - 1)/2个0的层数,所以补充完高宽都增加(kernel_size - 1) - output_padding(
intortuple,optional) - 在输出的每一个维度的一边补充0的层数,所以补充完高宽都增加padding,而不是2*padding,因为只补一边 - dilation(
intortuple,optional) – 卷积核元素之间的间距 - groups(
int,optional) – 从输入通道到输出通道的阻塞连接数 - bias(
bool,optional) - 如果bias=True,添加偏置
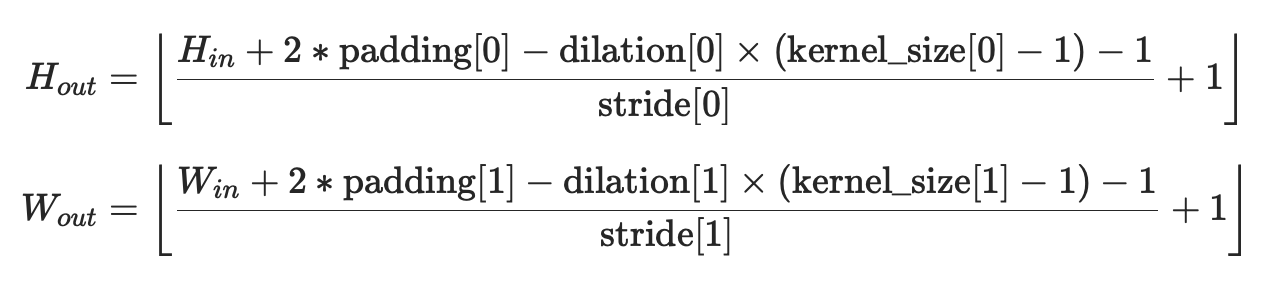
shape:
输入: (N,Cin,Hin,Win)
输出: (N,Cout,Hout,Wout)

变量:
- weight(tensor) - 卷积的权重,大小是(in_channels, in_channels,kernel_size) ,从![]() ,
,![]() 中进行采样
中进行采样
- bias(tensor) - 卷积的偏置系数,大小是(out_channel) ,从![]() ,
,![]() 中进行采样
中进行采样
⚠️deconv只能做到还原输出大小到和卷积输入大小一样大,输出值和卷积输入有那么一点联系
详细可见逆卷积的详细解释ConvTranspose2d(fractionally-strided convolutions)
举例:
import torch from torch import nn input = torch.randn(1,16,12,12) downsample = nn.Conv2d(16,16,3,stride=2,padding=1) upsample = nn.ConvTranspose2d(16,16,3,stride=2,padding=1) h = downsample(input) h.size()
返回:
torch.Size([1, 16, 6, 6])
output = upsample(h, output_size=input.size())
output.size()
返回:
torch.Size([1, 16, 12, 12])
如果没有指定:
output = upsample(h)
output.size()
返回将是:
torch.Size([1, 16, 12, 12])
使用output_padding也能解决这个问题:
upsample = nn.ConvTranspose2d(16,16,3,stride=2,padding=1,output_padding=1)
2)标准化层
class torch.nn.BatchNorm2d(num_features, eps=1e-05, momentum=0.1, affine=True)
对小批量(mini-batch)3d数据组成的4d输入进行批标准化(Batch Normalization)操作

进行了两步操作:可见Batch Normalization的解释
- 先对输入进行归一化,E(x)为计算的均值,Var(x)为计算的方差
- 然后对归一化的结果进行缩放和平移,设置affine=True,即意味着weight(γ)和bias(β)将被使用
在每一个小批量(mini-batch)数据中,计算输入各个维度的均值和标准差。γ与β是可学习的大小为C的参数向量(C为输入大小)。默认γ取值为U(0,1),β设置为0
同样,默认情况下,在训练期间,该层将运行其计算的平均值和方差的估计值,然后在验证期间使用这些估计值(即训练求得的均值/方差)进行标准化。运行估计(running statistics)时保持默认momentum为0.1。
如果track_running_stats被设置为False,那么这个层就不会继续运行验证,并且在验证期间也会使用批处理统计信息。
⚠️这个momentum参数不同于优化器optimizer类中使用的momentum参数和momentum的传统概念。从数学上讲,这里运行统计数据的更新规则是 :
- x是估计的数据
- xt是新的观察到的数据
xnew = (1-momentum) * x + momentum * xt
因为批处理规范化是在C维(channel通道维度)上完成的,计算(N,H,W)片上的统计信息,所以通常将其称为空间批处理规范化。
参数:
- num_features: C来自期待的输入大小(N,C,H,W)
- eps: 即上面式子中分母的ε ,为保证数值稳定性(分母不能趋近或取0),给分母加上的值。默认为1e-5。
- momentum: 动态均值和动态方差所使用的动量。默认为0.1。
- affine: 一个布尔值,当设为true,给该层添加可学习的仿射变换参数,即γ与β。
- track_running_stats:一个布尔值,当设置为True时,该模块跟踪运行的平均值和方差,当设置为False时,该模块不跟踪此类统计数据,并且始终在train和eval模式中使用批处理统计数据。默认值:True
Shape:
输入:(N, C,H, W)
输出:(N, C, H, W)(输入输出相同)
举例:
当affine=True时
import torch from torch import nn m = nn.BatchNorm2d(2,affine=True) print(m.weight) print(m.bias) input = torch.randn(1,2,3,4) print(input) output = m(input) print(output) print(output.size())
返回:
Parameter containing: tensor([0.5247, 0.4397], requires_grad=True) Parameter containing: tensor([0., 0.], requires_grad=True) tensor([[[[ 0.8316, -1.6250, 0.9072, 0.2746], [ 0.4579, -0.2228, 0.4685, 1.2020], [ 0.8648, -1.2116, 1.0224, 0.7295]], [[ 0.4387, -0.8889, -0.8999, -0.2775], [ 2.4837, -0.4111, -0.6032, -2.3912], [ 0.5622, -0.0770, -0.0107, -0.6245]]]]) tensor([[[[ 0.3205, -1.1840, 0.3668, -0.0206], [ 0.0916, -0.3252, 0.0982, 0.5474], [ 0.3409, -0.9308, 0.4373, 0.2580]], [[ 0.2664, -0.2666, -0.2710, -0.0211], [ 1.0874, -0.0747, -0.1518, -0.8697], [ 0.3160, 0.0594, 0.0860, -0.1604]]]], grad_fn=<NativeBatchNormBackward>) torch.Size([1, 2, 3, 4])
当affine=False时
import torch from torch import nn m = nn.BatchNorm2d(2,affine=False) print(m.weight) print(m.bias) input = torch.randn(1,2,3,4) print(input) output = m(input) print(output) print(output.size())
返回:
None None tensor([[[[-1.5365, 0.2642, 1.0482, 2.0938], [-0.0906, 1.8446, 0.7762, 1.2987], [-2.4138, -0.5368, -1.2173, 0.2574]], [[ 0.2518, -1.9633, -0.0487, -0.0317], [-0.9511, 0.2488, 0.3887, 1.4182], [-0.1422, 0.4096, 1.4740, 0.5241]]]]) tensor([[[[-1.2739, 0.0870, 0.6795, 1.4698], [-0.1811, 1.2814, 0.4740, 0.8689], [-1.9368, -0.5183, -1.0326, 0.0819]], [[ 0.1353, -2.3571, -0.2028, -0.1837], [-1.2182, 0.1320, 0.2894, 1.4478], [-0.3080, 0.3129, 1.5106, 0.4417]]]]) torch.Size([1, 2, 3, 4])
3)池化层
class torch.nn.MaxPool2d(kernel_size, stride=None, padding=0, dilation=1, return_indices=False, ceil_mode=False)
对于输入信号的输入通道,提供2维最大池化(max pooling)操作
如果输入的大小是(N,C,H,W),那么输出的大小是(N,C,H_out,W_out)和池化窗口大小kernel_size(kH,kW)的关系是:

如果padding不是0,会在输入的每一边添加相应数目0 dilation用于控制内核点之间的距离
参数kernel_size,stride, padding,dilation数据类型:
- 可以是一个
int类型的数据,此时卷积height和width值相同; - 也可以是一个
tuple数组(包含来两个int类型的数据),第一个int数据表示height的数值,tuple的第二个int类型的数据表示width的数值
参数:
- kernel_size(
intortuple) - max pooling的窗口大小 - stride(
intortuple,optional) - max pooling的窗口移动的步长。默认值是kernel_size - padding(
intortuple,optional) - 输入的每一条边补充0的层数 - dilation(
intortuple,optional) – 一个控制窗口中元素步幅的参数 - return_indices - 如果等于
True,会返回输出最大值的序号,对于上采样操作torch.nn.MaxUnpool2d会有帮助 - ceil_mode - 如果等于
True,计算输出信号大小的时候,会使用向上取整ceil,代替默认的向下取整floor的操作
shape:
输入: (N,C,Hin,Win)
输出: (N,C,Hout,Wout)
class torch.nn.AdaptiveAvgPool2d(output_size)
对输入信号,提供2维的自适应平均池化操作
Adaptive Pooling特殊性在于:
输出张量的大小都是给定的output_size。
例如输入张量大小为(1, 64, 8, 9),设定输出大小为(5,7),通过Adaptive Pooling层,可以得到大小为(1, 64, 5, 7)的张量
对于任何输入大小的输入,可以将输出尺寸指定为H*W,但是输入和输出特征的数目不会变化。
参数:
- output_size: 输出信号的尺寸,可以用(H,W)表示
H*W的输出,也可以使用单个数字H表示H*H大小的输出
举例:
input = torch.randn(1,64,8,9) m = nn.AdaptiveAvgPool2d((5,7)) output = m(input) output.shape
返回:
torch.Size([1, 64, 5, 7])
input = torch.randn(1,64,8,9) m = nn.AdaptiveAvgPool2d(7) output = m(input) output.shape
返回:
torch.Size([1, 64, 7, 7])
4)非线形激活函数
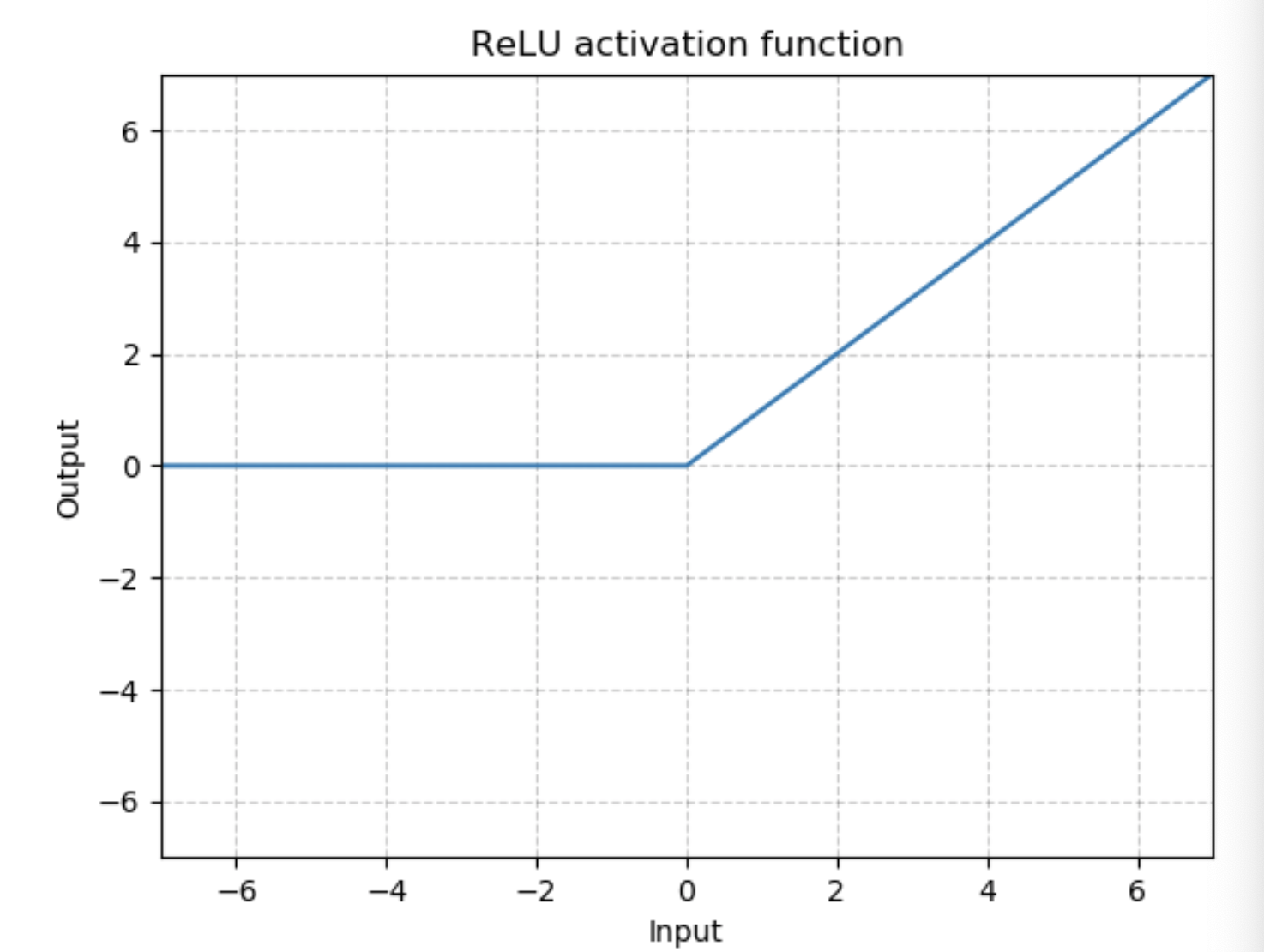
class torch.nn.ReLU(inplace=False)
对输入运用修正线性单元函数:
{ReLU}(x)= max(0, x)
图为:
参数: inplace-选择是否进行原位运算,即x= x+1
shape:
- 输入:(N,*), *代表任意数目附加维度
- 输出:(N,*),与输入拥有同样的形状
举例:
import torch from torch import nn m = nn.ReLU() input = torch.randn(2) output = m(input) input, output
返回:
(tensor([-0.0468, 0.2225]), tensor([0.0000, 0.2225]))
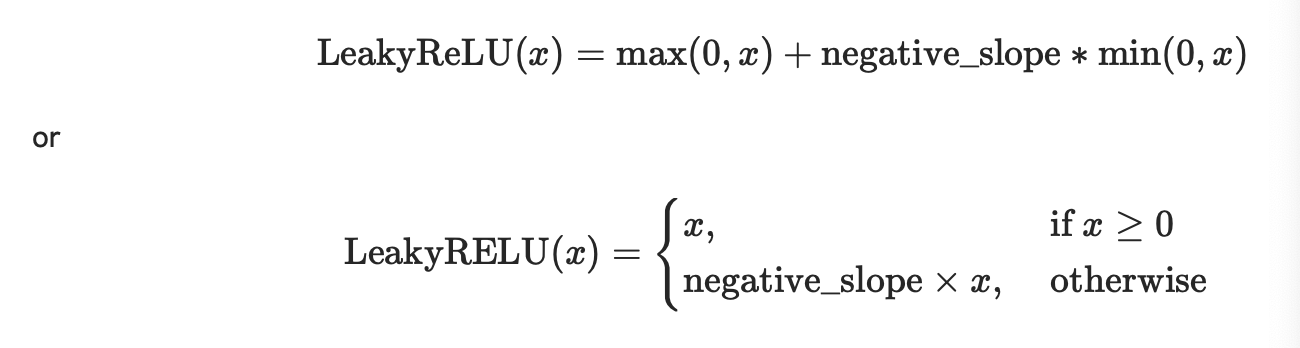
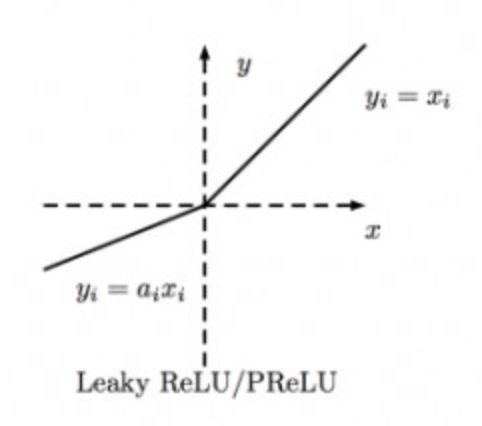
class torch.nn.LeakyReLU(negative_slope=0.01, inplace=False)
是ReLU的变形,Leaky ReLU是给所有负值赋予一个非零斜率
对输入的每一个元素运用:
参数:
- negative_slope:控制负斜率的角度,默认等于0.01
- inplace-选择是否进行原位运算,即x= x+1,默认为False
形状:
- 输入:(N,*), *代表任意数目附加维度
- 输出:(N,*),与输入拥有同样的形状
图为:
举例:
m = nn.LeakyReLU(0.1) input = torch.randn(2) output = m(input) input,output
返回:
(tensor([-1.3222, 0.8163]), tensor([-0.1322, 0.8163]))
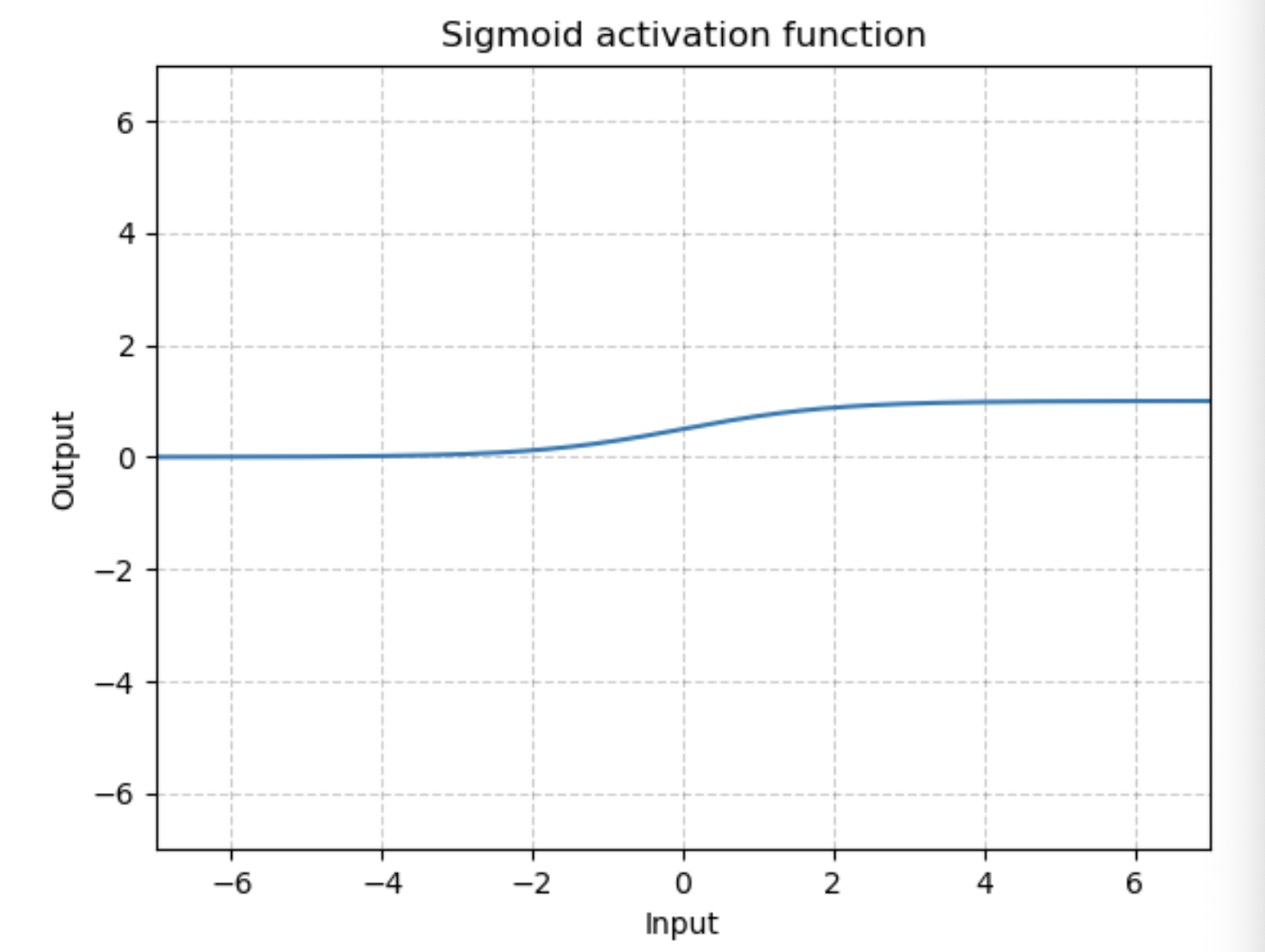
class torch.nn.Sigmoid
输出值的范围为[0,1]
提供元素方式函数:
![]()
形状:
- 输入:(N,*), *代表任意数目附加维度
- 输出:(N,*),与输入拥有同样的形状
图为:
举例:
m = nn.Sigmoid() input = torch.randn(2) output = m(input) input, output
返回:
(tensor([-0.8425, 0.7383]), tensor([0.3010, 0.6766]))
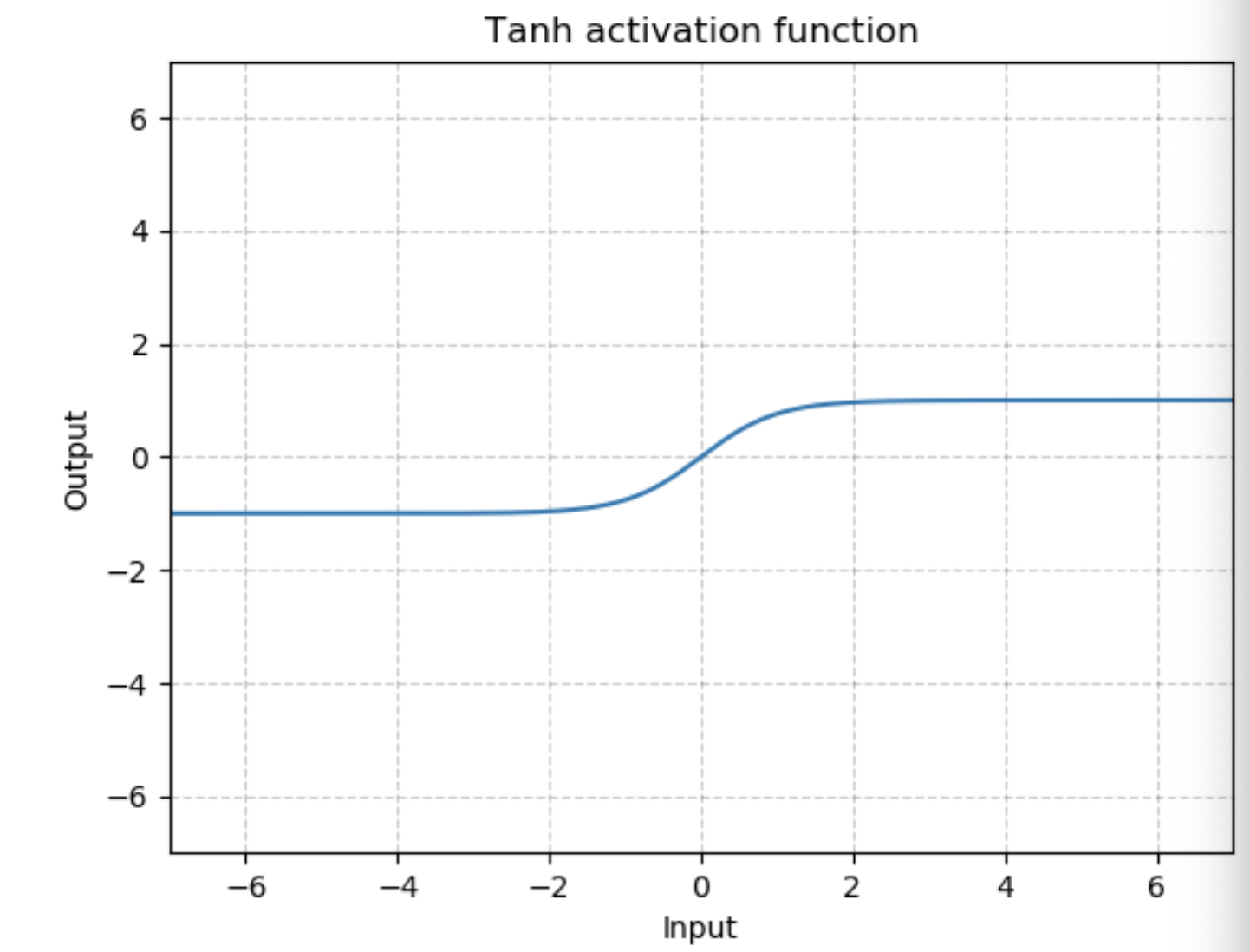
class torch.nn.Tanh
输出值的范围为[-1,1]
提供元素方式函数:
![]()
形状:
- 输入:(N,*), *代表任意数目附加维度
- 输出:(N,*),与输入拥有同样的形状
图为:
举例:
m = nn.Tanh() input = torch.randn(2) output = m(input) input, output
返回:
(tensor([-0.6246, 0.1523]), tensor([-0.5543, 0.1512]))
5)损失函数
class torch.nn.BCELoss(weight=None, size_average=True, reduce=None, reduction='mean')
计算 target 与 output 之间的二进制交叉熵。
损失函数能被描述为:
![]()
N是批处理大小。如果reduce=True,则:

即默认情况下,loss会基于element求平均值,如果size_average=False的话,loss会被累加。
这是用来测量误差error的重建,例如一个自动编码器。注意 0<=target[i]<=1。
参数:
- weight (Tensor,可选) – a manual rescaling weight given to the loss of each batch element. If given, has to be a Tensor of size “nbatch”.每批元素损失的手工重标权重。如果给定,则必须是一个大小为“nbatch”的张量。
- size_average (bool, 可选) –
弃用(见reduction参数)。默认情况下,设置为True,即对批处理中的每个损失元素进行平均。注意,对于某些损失,每个样本有多个元素。如果字段size_average设置为False,则对每个小批的损失求和。当reduce为False时,该参数被忽略。默认值:True - reduce (bool,可选) –
弃用(见)。默认情况下,设置为True,即根据size_average参数的值决定对每个小批的观察值是进行平均或求和。如果reduce为False,则返回每个批处理元素的损失,不进行平均和求和操作,即忽略size_average参数。默认值:Truereduction参数 - reduction (string,可选) – 指定要应用于输出的
reductionreduction
形状:
- 输入:(N,*), *代表任意数目附加维度
- 目标:(N,*),与输入拥有同样的形状
- 输出:标量scalar,即输出一个值。如果reduce为False,即不进行任何处理,则(N,*),形状与输入相同。
举例:
m = nn.Sigmoid() loss = nn.BCELoss() input = torch.randn(3,requires_grad=True) target = torch.empty(3).random_(2) output = loss(m(input), target) output.backward()
input,target,output
返回:
(tensor([-0.8728, 0.3632, -0.0547], requires_grad=True), tensor([1., 0., 0.]), tensor(0.9264, grad_fn=<BinaryCrossEntropyBackward>))
input.grad
返回:
tensor([-0.2351, 0.1966, 0.1621])

 浙公网安备 33010602011771号
浙公网安备 33010602011771号