
OpenCV2:Mat属性type,depth,step
在OpenCV2中Mat类无疑使占据着核心地位的,前段时间初学OpenCV2时对Mat类有了个初步的了解,见OpenCV2:Mat初学。这几天试着用OpenCV2实现了图像缩小的两种算法:基于等间隔采样和基于局部均值的图像缩小,发现对Mat中的数据布局和一些属性的认知还是懵懵懂懂,本文对Mat的一些重要属性和数据布局做一个总结。
Mat的作用
The class Mat represents an n-dimensional dense numerical single-channel or multi-channel array. It can be used to store real or complex-valued vectors and matrices, grayscale or color images, voxel volumes, vector fields, point clouds, tensors, histograms (though, very high-dimensional histograms may be better stored in a SparseMat ).
上面的一段话引用自官方的文档,Mat类用于表示一个多维的单通道或者多通道的稠密数组。能够用来保存实数或复数的向量、矩阵,灰度或彩色图像,立体元素,点云,张量以及直方图(高维的直方图使用SparseMat保存比较好)。简而言之,Mat就是用来保存多维的矩阵的。
Mat的常见属性
- data uchar型的指针。Mat类分为了两个部分:矩阵头和指向矩阵数据部分的指针,data就是指向矩阵数据的指针。
- dims 矩阵的维度,例如5*6矩阵是二维矩阵,则dims=2,三维矩阵dims=3.
- rows 矩阵的行数
- cols 矩阵的列数
- size 矩阵的大小,size(cols,rows),如果矩阵的维数大于2,则是size(-1,-1)
- channels 矩阵元素拥有的通道数,例如常见的彩色图像,每一个像素由RGB三部分组成,则channels = 3
下面的几个属性是和Mat中元素的数据类型相关的。
- type
表示了矩阵中元素的类型以及矩阵的通道个数,它是一系列的预定义的常量,其命名规则为CV_(位数)+(数据类型)+(通道数)。具体的有以下值:
这里U(unsigned integer)表示的是无符号整数,S(signed integer)是有符号整数,F(float)是浮点数。CV_8UC1 CV_8UC2 CV_8UC3 CV_8UC4 CV_8SC1 CV_8SC2 CV_8SC3 CV_8SC4 CV_16UC1 CV_16UC2 CV_16UC3 CV_16UC4 CV_16SC1 CV_16SC2 CV_16SC3 CV_16SC4 CV_32SC1 CV_32SC2 CV_32SC3 CV_32SC4 CV_32FC1 CV_32FC2 CV_32FC3 CV_32FC4 CV_64FC1 CV_64FC2 CV_64FC3 CV_64FC4
例如:CV_16UC2,表示的是元素类型是一个16位的无符号整数,通道为2.
C1,C2,C3,C4则表示通道是1,2,3,4
type一般是在创建Mat对象时设定,如果要取得Mat的元素类型,则无需使用type,使用下面的depth - depth
矩阵中元素的一个通道的数据类型,这个值和type是相关的。例如 type为 CV_16SC2,一个2通道的16位的有符号整数。那么,depth则是CV_16S。depth也是一系列的预定义值,
将type的预定义值去掉通道信息就是depth值:
CV_8U CV_8S CV_16U CV_16S CV_32S CV_32F CV_64F - elemSize
矩阵一个元素占用的字节数,例如:type是CV_16SC3,那么elemSize = 3 * 16 / 8 = 6 bytes - elemSize1
矩阵元素一个通道占用的字节数,例如:type是CV_16CS3,那么elemSize1 = 16 / 8 = 2 bytes = elemSize / channels
下面是一个示例程序,具体说明Mat的各个属性:
Mat img(3, 4, CV_16UC4, Scalar_<uchar>(1, 2, 3, 4)); cout << img << endl; cout << "dims:" << img.dims << endl; cout << "rows:" << img.rows << endl; cout << "cols:" << img.cols << endl; cout << "channels:" << img.channels() << endl; cout << "type:" << img.type() << endl; cout << "depth:" << img.depth() << endl; cout << "elemSize:" << img.elemSize() << endl; cout << "elemSize1:" << img.elemSize1() << endl;
首先创建了一个3*4的具有4个通道的矩阵,其元素类型是CV_16U。Scalar_是一个模板向量,用来初始化矩阵的每个像素,因为矩阵具有4个通道,Scalar_有四个值。其运行结果:  运行结果首先打印了Mat中的矩阵,接着是Mat的各个属性。注意其type = 26,而depth = 2。这是由于上面所说的各种预定义类型
运行结果首先打印了Mat中的矩阵,接着是Mat的各个属性。注意其type = 26,而depth = 2。这是由于上面所说的各种预定义类型
例如,CV_16UC4,CV_8U是一些预定义的常量。
step
Mat中的step是一个MStep的一个实例。其声明如下:
struct CV_EXPORTS MStep { MStep(); MStep(size_t s); const size_t& operator[](int i) const; size_t& operator[](int i); operator size_t() const; MStep& operator = (size_t s); size_t* p; size_t buf[2]; protected: MStep& operator = (const MStep&); };
从其声明中可以看出,MStep和size_t有比较深的关系。用size_t作为参数的构造函数和重载的赋值运算符
MStep(size_t s); MStep& operator = (size_t s);
向size_t的类型转换以及重载的[ ]运算符返回size_t
const size_t& operator[](int i) const; size_t& operator[](int i);
size_t的数组以及指针
size_t* p; size_t buf[2];
那么size_t又是什么呢,看代码
typedef unsigned int size_t;
size_t就是无符号整数。
再看一下MStep的构造函数,就可以知道其究竟保存的是什么了。
inline Mat::MStep::MStep(size_t s) { p = buf; p[0] = s; p[1] = 0; }
从MStep的定义可以知道,buff是一个size_t[2],而p是size_t *,也就是可以把MStep看做一个size_t[2]。那么step中保存的这个size_t[2]和Mat中的数据有何种关系呢。
step[0]是矩阵中一行元素的字节数。
step[1]是矩阵中一个元素的自己数,也就是和上面所说的elemSize相等。
上面说到,Mat中一个uchar* data指向矩阵数据的首地址,而现在又知道了每一行和每一个元素的数据大小,就可以快速的访问Mat中的任意元素了。下面公式:
![addr(M_{i,j}) = M.data + M.step[0]*i + M.step[1]*j](http://docs.opencv.org/master/_images/math/17192416401bd8aab16de64c8467641e39f972c7.png)
step1
规整化的step,值为step / elemSize1。 定义如下:
inline size_t Mat::step1(int i) const { return step.p[i]/elemSize1(); }
仍以上例代码中定义的img为例,来看下step,step1具体的值:  img(3*4)的type是CV_16UC4,step[0]是其一行所占的数据字节数4 *4 * 16 / 8 = 32.
img(3*4)的type是CV_16UC4,step[0]是其一行所占的数据字节数4 *4 * 16 / 8 = 32.
step[1] 是一个元素所占的字节数,img的一个元素具有4个通道,故:4 * 16 / 8 = 2
step1 = step / elemSize1,elemSize1是元素的每个通道所占的字节数。
N维的step(N > 2)
上面分析step是一个size_t[2],实际不是很正确,正确的来说step应该是size_t[dims],dims是Mat的维度,所以对于上面的二维的Mat来说,step是size_t[2]也是正确的。
下面就对三维的Mat数据布局以及step(维度大于3的就算了吧)。
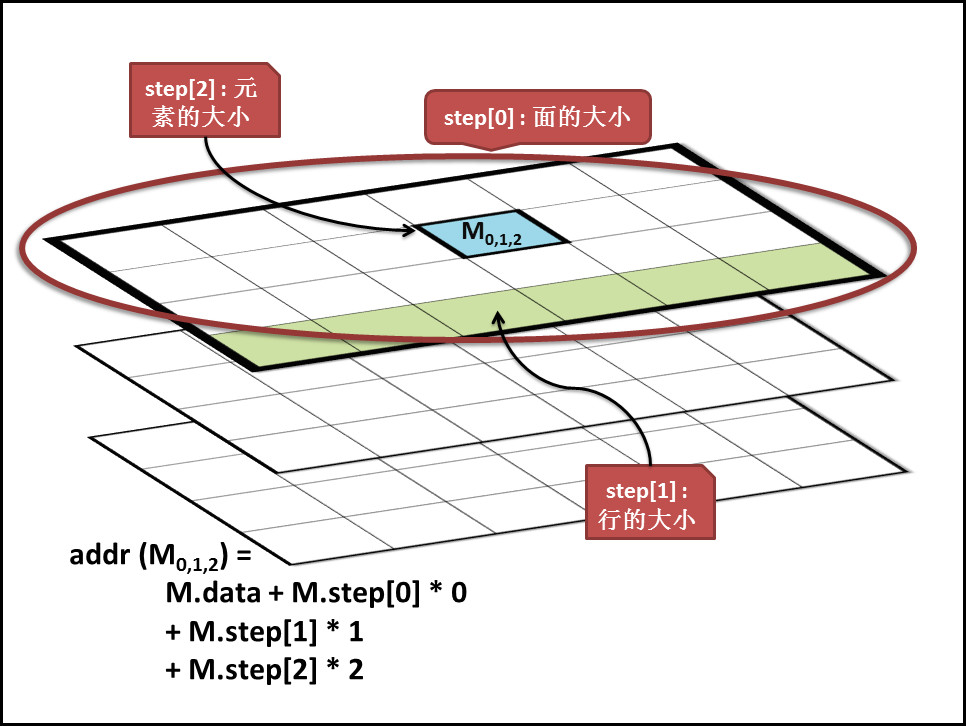
上图引用自http://ggicci.blog.163.com/blog/static/210364096201261052543349/ 搜集资料时发现了这幅图,一切就变的简单了 ![]() 感谢作者 Ggicci
感谢作者 Ggicci
三维的数据在Mat中是按面来存储的,上图描述的很清晰,这里不再多说。
上面言道,step是一个size_t[dims],dims是维度。so,三维的step就是size_t[3]。其余的不多说了,看图就有了。下面来创建一个三维的Mat,实际看看
int dims[3] = { 3, 3, 3 }; Mat src(3, dims, CV_16SC2, Scalar_<short>(1,2)); cout << "step[0]:" << src.step[0] << endl; cout << "step[1]:" << src.step[1] << endl; cout << "step[2]:" << src.step[2] << endl;
首先创建一个3*3*3,depth为CV_16S的两通道的Mat
step[0]是一个数据面的大小 3 * 3 * (16 / 8 ) * 2 = 36
step[1]是一行数据的大小 3 * (16 / 8 ) * 2 = 12
step[2]是一个元素的大小 2 * (16 / 8) = 4

PS: 三维的Mat 不能使用 <<运算符进行输出的。
over

 浙公网安备 33010602011771号
浙公网安备 33010602011771号