


LocalParameterization子类说明:QuaternionParameterization类和EigenQuaternionParameterization类
简单地说。LocalParameterization 是在优化 Manifold 上的变量时需要考虑的,Manifold 上变量是 over parameterized,即 Manifold 上变量的维度大于其自由度。这会导致 Manifold 上变量各个量之间存在约束,如果直接对这些量求导、优化,那么这就是一个有约束的优化,实现困难。为了解决这个问题,在数学上是对 Manifold 在当前变量值处形成的切空间(Tangent Space)求导,在切空间上优化,最后投影回 Manifold。
对于 SLAM 问题,广泛遇到的 Manifold 是旋转,旋转仅需使用 3 个量(so(3))即可表达,但是实际应用中因为涉及到万向锁的问题,在更高维度表达旋转。四元数就是在维度 4 表达 3 个自由度的三维空间的旋转。
1.四元数相关知识
1.1 四元数乘法
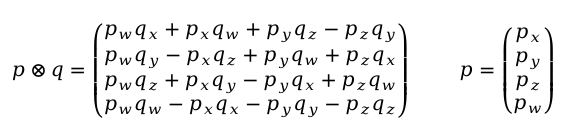
对于两个四元数
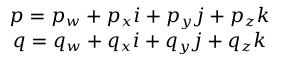
得到pq的乘法为
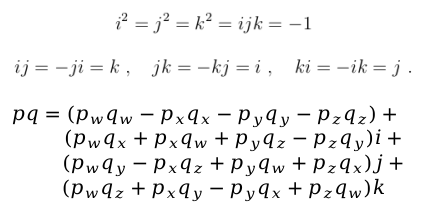
Ceres 中四元数通常采用的内存布局为 w, x, y, z,pq乘法写成4×1矩阵,如下
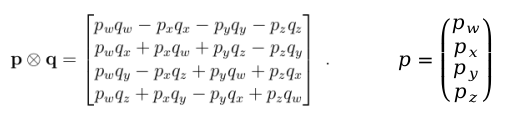
可以推导出如下公式

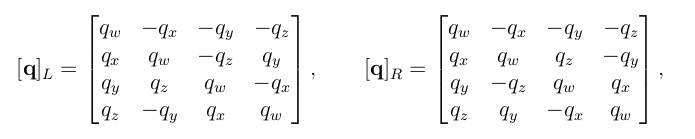
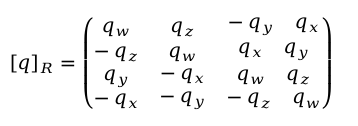
但是Eigen::Quaternion,其内部内存分布为:x, y, z, w 和 Ceres 存储的顺序不同 (w, x, y, z),因此乘法公式写为
可以推导出如下公式

2.QuaternionParameterization
class CERES_EXPORT QuaternionParameterization : public LocalParameterization {
public:
virtual ~QuaternionParameterization() {}
// 重载的 Plus 函数给出了四元数的更新方法,接受参数分别为优化前的四元数 x,用旋转矢量表示的增量delta,以及更新后的四元数 x_plus_delta
// 函数首先将增量由旋转矢量转换为四元数,随后采用标准四元数乘法对四元数进行更新
virtual bool Plus(const double* x,
const double* delta,
double* x_plus_delta) const;
// 四元数相对于旋转矢量的雅克比矩阵。即x_plus_delta( Plus(x, delta) ) 关于 delta( delta接近0 )的雅克比矩阵
virtual bool ComputeJacobian(const double* x,
double* jacobian) const;
// 返回 4,表示 Manifold 空间(四元数)是 4 维的。即四元数本身的实际维数
virtual int GlobalSize() const { return 4; }
// 返回 3,表示切空间是 3 维的。即旋转矢量的实际维数
virtual int LocalSize() const { return 3; }
};
2.1 QuaternionParameterization::Plus
/*
x: 待优化的四元数(x,在 Manifold,4维)
delta: 增量(delta,在 Tangent Space,3维)
x_plus_delta: 更新后的四元数,plus(x, delta)
plus(x, delta) = [cos(|delta|, sin(|delta|) / |delta| * delta] ⊗ x
参考http://ceres-solver.org/nnls_modeling.html#localparameterization
*/
bool QuaternionParameterization::Plus(const double* x,
const double* delta,
double* x_plus_delta) const {
/* --------1.将旋转矢量转换为四元数形式-------- */
// 1.1 得到delta的模
const double norm_delta =
sqrt(delta[0] * delta[0] + delta[1] * delta[1] + delta[2] * delta[2]);
if (norm_delta > 0.0) {
// 1.2 得到sin(|delta|) / |delta|
const double sin_delta_by_delta = (sin(norm_delta) / norm_delta);
double q_delta[4];
// 1.3 得到x_plus_delta
q_delta[0] = cos(norm_delta);
q_delta[1] = sin_delta_by_delta * delta[0];
q_delta[2] = sin_delta_by_delta * delta[1];
q_delta[3] = sin_delta_by_delta * delta[2];
/* --------2.采用四元数乘法更新-------- */
// x_plus_delta = q_delta ⊗ x,注意这个乘法的顺序关乎求雅克比矩阵,具体说明参照ComputeJacobian
QuaternionProduct(q_delta, x, x_plus_delta);
} else {
for (int i = 0; i < 4; ++i) {
x_plus_delta[i] = x[i];
}
}
return true;
}
2.2 QuaternionParameterization::ComputeJacobian
bool QuaternionParameterization::ComputeJacobian(const double* x,
double* jacobian) const {
jacobian[0] = -x[1]; jacobian[1] = -x[2]; jacobian[2] = -x[3]; // NOLINT
jacobian[3] = x[0]; jacobian[4] = x[3]; jacobian[5] = -x[2]; // NOLINT
jacobian[6] = -x[3]; jacobian[7] = x[0]; jacobian[8] = x[1]; // NOLINT
jacobian[9] = x[2]; jacobian[10] = -x[1]; jacobian[11] = x[0]; // NOLINT
return true;
}
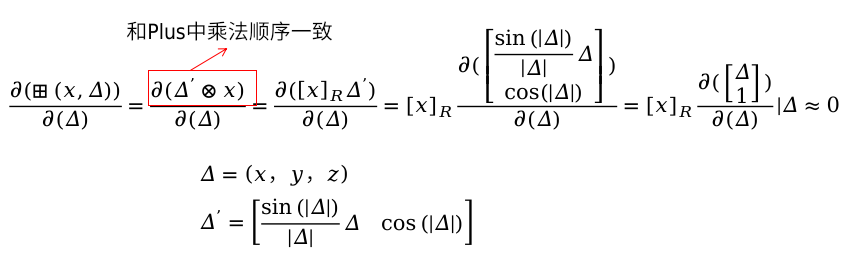
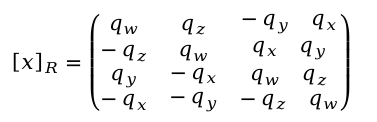
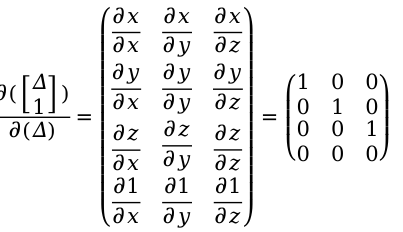
推导流程如下:
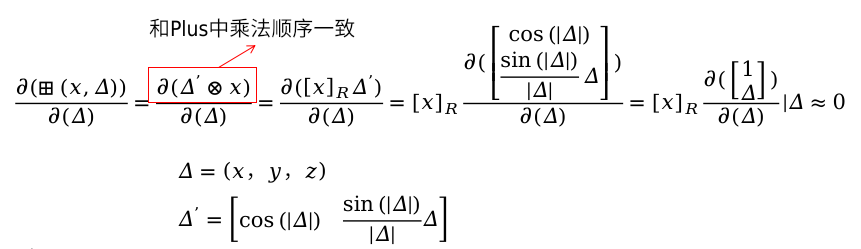
参照http://ceres-solver.org/nnls_modeling.html#localparameterization
根据
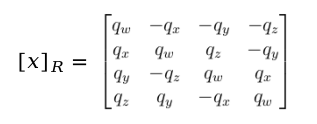
推导得到最后的雅克比矩阵为

3.EigenQuaternionParameterization
// 和QuaternionParameterization类似。区别就是四元数在Eigen::Quaterniond中的内部内存分布为:x, y, z, w,不过构造顺序还是w,x,y,z
class CERES_EXPORT EigenQuaternionParameterization
: public ceres::LocalParameterization {
public:
virtual ~EigenQuaternionParameterization() {}
virtual bool Plus(const double* x,
const double* delta,
double* x_plus_delta) const;
virtual bool ComputeJacobian(const double* x, double* jacobian) const;
virtual int GlobalSize() const { return 4; }
virtual int LocalSize() const { return 3; }
};
3.1 EigenQuaternionParameterization::Plus
bool EigenQuaternionParameterization::Plus(const double* x_ptr,
const double* delta,
double* x_plus_delta_ptr) const {
Eigen::Map<Eigen::Quaterniond> x_plus_delta(x_plus_delta_ptr);
Eigen::Map<const Eigen::Quaterniond> x(x_ptr);
const double norm_delta =
sqrt(delta[0] * delta[0] + delta[1] * delta[1] + delta[2] * delta[2]);
if (norm_delta > 0.0) {
const double sin_delta_by_delta = sin(norm_delta) / norm_delta;
// Note, in the constructor w is first.
Eigen::Quaterniond delta_q(cos(norm_delta),
sin_delta_by_delta * delta[0],
sin_delta_by_delta * delta[1],
sin_delta_by_delta * delta[2]);
// 注意乘法的顺序
x_plus_delta = delta_q * x;
} else {
x_plus_delta = x;
}
return true;
}
3.2 EigenQuaternionParameterization::ComputeJacobian
bool EigenQuaternionParameterization::ComputeJacobian(const double* x,
double* jacobian) const {
jacobian[0] = x[3]; jacobian[1] = x[2]; jacobian[2] = -x[1]; // NOLINT
jacobian[3] = -x[2]; jacobian[4] = x[3]; jacobian[5] = x[0]; // NOLINT
jacobian[6] = x[1]; jacobian[7] = -x[0]; jacobian[8] = x[3]; // NOLINT
jacobian[9] = -x[0]; jacobian[10] = -x[1]; jacobian[11] = -x[2]; // NOLINT
return true;
}
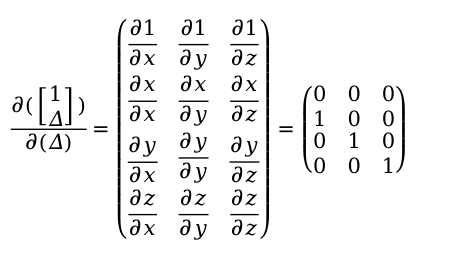
推导流程如下:
根据
推导得到最后的雅克比矩阵为

参考
https://www.cnblogs.com/JingeTU/p/11707557.html
https://cxybb.com/article/hltt3838/109693787
https://www.xiaotaoguo.com/p/ceres-usage-2/
https://blog.csdn.net/hjwang1/article/details/107869743

 浙公网安备 33010602011771号
浙公网安备 33010602011771号