线扫相机DALSA-Basic Timing(基本设置)
- Basic Timing(基本设置)
![在这里插入图片描述]()
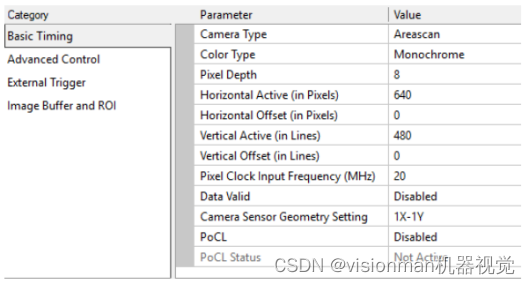
Camera Type(相机类型):Areascan(面阵相机)、Linescan(线阵相机)
Color Type(色彩类型):Monochrome(黑白)、Bayer mosaic(彩色-拜耳阵列)
Pixel Depth(像素位深):指存储每个像素所用的位数。简而言之,像素位深越大,单个像素包含的信息越多,放大图像越不容易模糊。
Horizontal Active(In Pixels)(设置相机专家横方向分辨率X坐标上限):4K为4096,8K为8192,16K为16384,请使用默认值,无需更改。
解释:8K相机该参数默认为8192,此时移动鼠标至Image窗口最右侧,即可看到Position内显示数值为(8192,XXXX),如果改变该参数就改变Position内X坐标的数值上限。
Horizontal Offset(In Pixels)(水平方向补偿值):设置无效像素个数,图像裁剪请使用Image Buffer and ROI内的Offset,此处Offset默认为0。
Vertical Active(in Lines):设置图像竖直方向的分辨率,LineScan状态不显示该参数栏。
Vertical Offset
本文来自博客园,作者:{视觉人机器视觉},转载请注明原文链接:https://www.cnblogs.com/visionman/p/17405243.html

 浙公网安备 33010602011771号
浙公网安备 33010602011771号