毫米波传感简介(四):调频连续波雷达—系统设计
通过前面三个模块我们已经了解了雷达中的距离和速度估算功能。本模块将对所有这些信息加以整合,并包含以下内容:
- 回顾用于距离和速度估算的信号处理流程;
- 尝试设计一个发射信号,该信号满足一些有关距离分辨率、最大距离、速度分辨率、最大速度的指定要求,感受其中涉及的一些权衡取舍;
- 最后,我们将了解通常称为雷达距离方程的东西,它是一种雷达的链路预算,其中涉及输出功率和雷达可以看见的最大距离的天线增益等参数。
1. FMCW 2D-FFT简述
我们知道可以使用"range-FFT"来解析处于不同距离的物体。然后,通过在一个帧中的后续线性调频脉冲上执行"doppler-FFT",来解析相对于雷达可能具有相同距离但具有不同速度的物体,如下图所示:
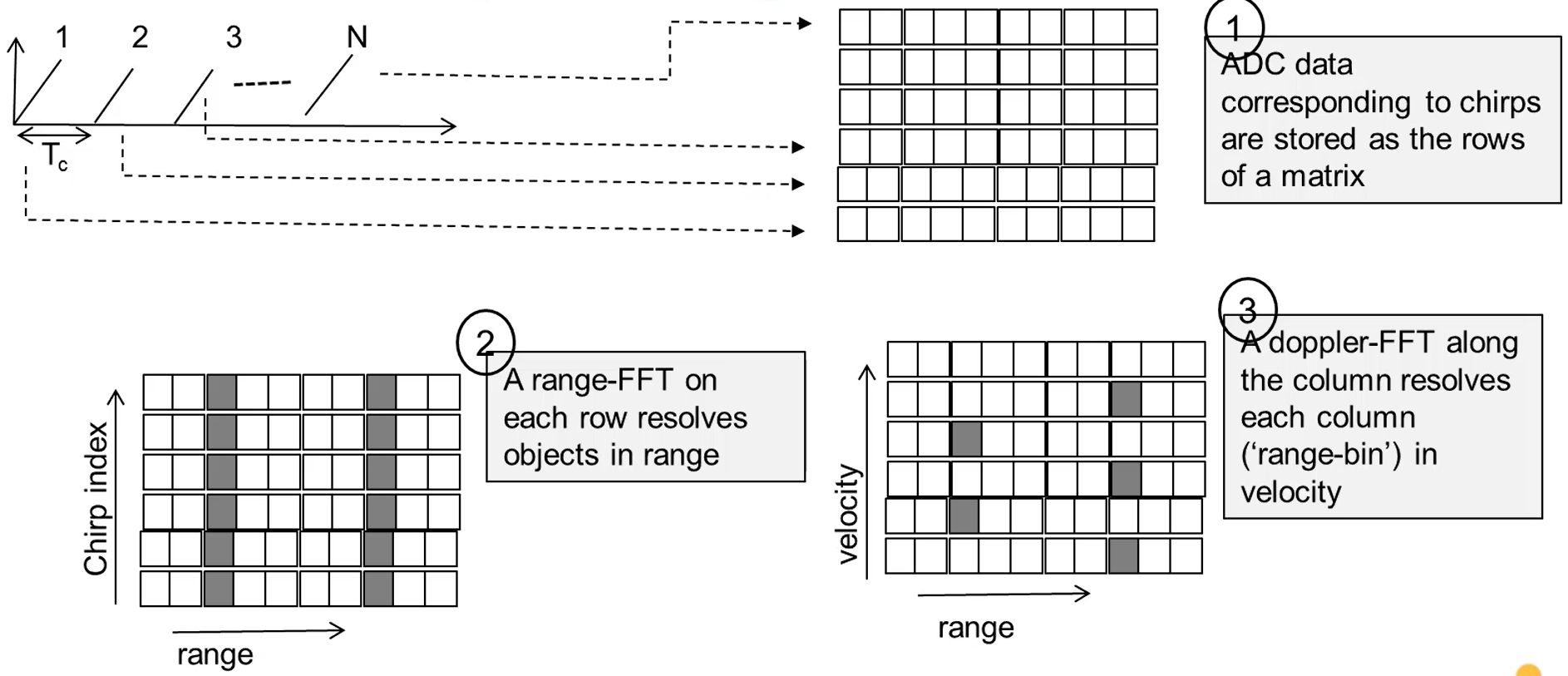
左上角为一个帧,多个线性调频脉冲在其中传输。与其中的每个 chirp 对应的 ADC 样本可以通过存储为矩阵的行实现可视化(右上图所示)。因此,这里的每个行都与来自特定线性调频脉冲的样本相对应。
然后对每个行执行称为"range-FFT"。该"range-FFT"可解析测量范围之内的物体。左下图是距离 FFT 的结果,可以在这里看到,第三个距离单元和倒数第三个距离单元中都有物体。
请注意,x 轴实际上是与"range-FFT" 单元对应的频率,但由于距离与 IF 频率成正比,因此可以等效地将该轴绘制为距离轴。
随后会沿着这些"range-FFT"结果的列执行"doppler-FFT",这将在速度维度解析物体。右下是"doppler-FFT"的结果。可以看到,第三个距离单元有两个具有不同速度的物体,同样地,倒数第三单元有三个具有不同速度的物体。
重申一下, y 轴实际上是与"doppler-FFT"对应的离散角频率,但由于这些离散角频率与速度成正比,因此可以等效地将该轴绘制为速度轴。
执行距离FFT,然后再执行多普勒 FFT 的整个过程统称为 2D-FFT,或二维 FFT。可以在 FMCW RADAR 文献中经常听到该术语。需要注意的一个问题是,在大多数 FMCW RADAR 实现中,通常在每个线性调频脉冲的 ADC 数据变得可用时以内联方式执行"range-FFT"。因此,可以将每个线性调频脉冲的 ADC 数据视为在 DSP 处进行接收。然后,DSP 执行"range-FFT",并将"range-FFT"存储在某个存储器中。
另一个需要注意的问题是,只有在所有"range-FFT"都变得可用时才能执行"doppler-FFT",也就是说,当所有行都被填充时才能直行"doppler-FFT"。因此系统中应具有足够的存储器,用于存储与某个帧对应的所有距离 FFT 的内容。
2. 将需求映射为调频脉冲参数
下面是一组我们到目前为止已了解的公式:
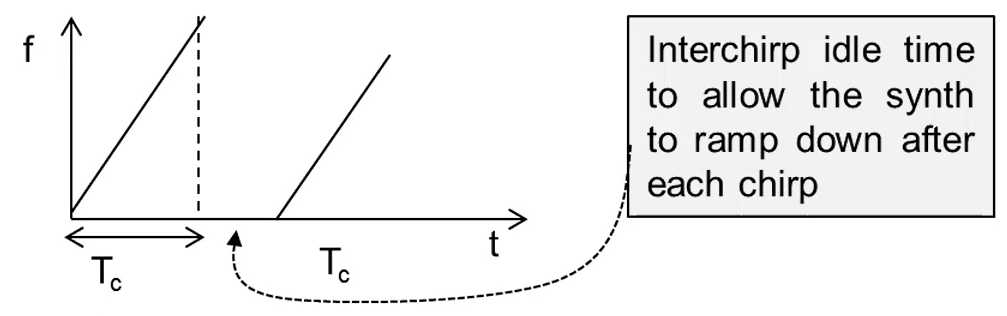
- (1.a)式表明最大不模糊可测速度与两个相邻线性调频脉冲之间的持续时间成反比;
- (1.b)式表明速度分辨率与总帧时间成反比;
- (1.c)式表明距离分辨率与线性调频脉冲跨越的总带宽成反比;
- (1.d)式所需的 IF 带宽与斜率和我们希望雷达看到的最大距离的乘积成正比。
假设我们获取了有关距离分辨率\(d_{\text{res}}\)、最大距离\(d_{\max}\)、速度分辨率\(v_{\text{res}}\)、最大速度\(v_{\max}\)的要求。我们如何使用这些要求来设计帧?
我们简述一个可能的设计方法:
先从 \(v_{\max}\) 开始,其仅取决于 Tc,因此,在给定\(v_{\max}\)的情况下,我们可以直接计算出线性调频脉冲间时间\(T_{c}\):
接下来由于距离分辨率仅取决于线性调频脉冲带宽,那么根据距离分辨率可以获得脉冲带宽:
(2.a)和(2.b)分别确定了chirp的持续时间和带宽,这意味着我们已经可以锁定chirp的斜率:
接下来,帧持续时间仅取决于速度分辨率。那么,我们可以计算出所需的帧时间:
所需的线性调频脉冲数为:
到这里我们的整个帧定义就基本结束了。请注意,我们仍未使用这里的方程(1.d)。那么,我们假设雷达设备将支持该方程确定的必要IF 带宽。
实际上,前面我们并没有考虑各种设备限制,获取chirp参数的过程可能需要比上述更多的迭代。例如:
- 当设备不支持最大所需 IF 带宽。注意,最大 IF 带宽与斜率(S)和所需最大距离(\(d_{\max}\))的乘积成正比,因此,可能需要在斜率(S)和最大距离(\(d_{\max}\))之间进行权衡取舍。
- 设备必须能够生成所需的斜率(S)。每个设备通常对合成器能够生成的线性调频脉冲最大斜率有限制。
- 对于相邻线性调频脉冲之间的空闲时间,可能还存在特定于设备的要求,需要满足这些要求。
- 最后,器件必需具有足够的存储器,用于存储帧中所有线性调频脉冲的"range-FFT"数据。请注意,必须存储所有线性调频脉冲的"range-FFT"数据,然后才能执行"doppler-FFT"计算。
下图详细介绍了斜率(S)和最大距离\(d_{\max}\)之间的权衡取舍。
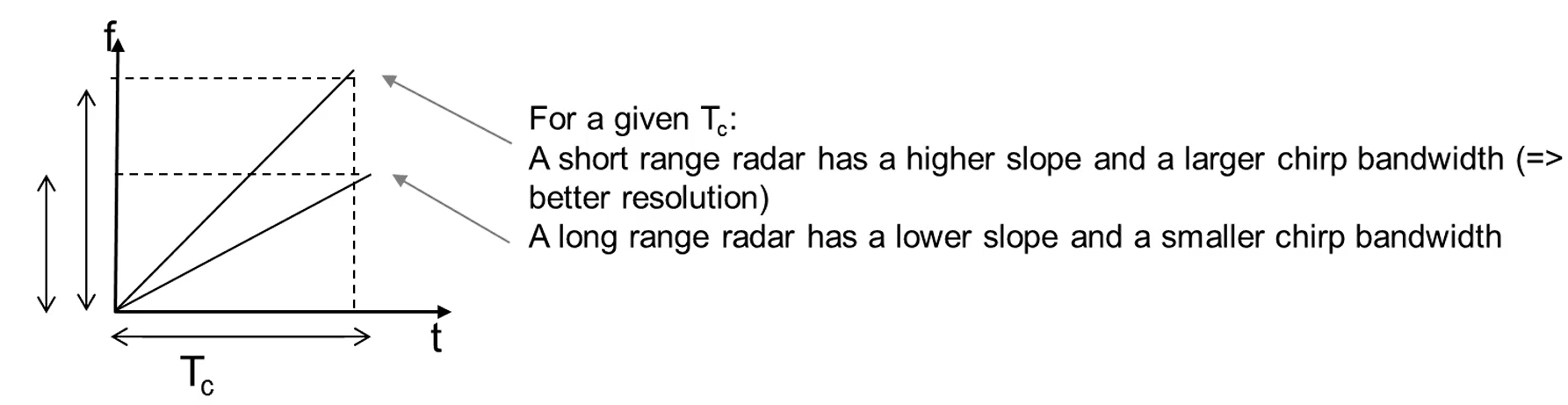
斜率(S)和\(d_{\max}\)的乘积受到设备中可用IF 带宽的限制。因此,随着 \(d_{\max}\) 增加,斜率 S 必须减小。假设线性调频脉冲的持续时间 \(T_c\)已确定,基于最大速度要求,较小的斜率将直接转换为较差的分辨率。
3. 雷达测距方程
另一个决定最大距离的重要因素就是最大距离物体反射的信号应具有足够的强度,以便能够被雷达检测到。那么,我们需要探讨一下该接收的信号强度取决于哪些因素。
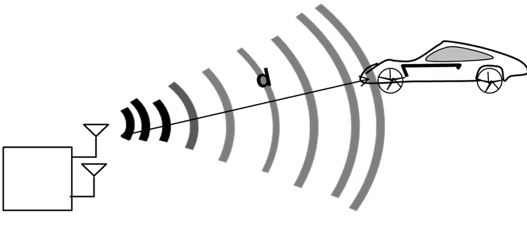
上图中有一个雷达设备,它正在输出 \(P_{t}\) 瓦的功率。该功率从发射器的天线发出,由于信号不断地扩散开,因此其功率密度随着距离平方的增加而不断减小:
可以通过采用具有更佳增益的天线来增大该功率密度。其工作方式通常为提高其方向性来提高其增益,也就是说,在更窄的视场中聚集设备的输出功率,那么,我们在该表达式中包含天线增益 \(G_{TX}\):
现在,距离为 d 的目标反射的功率(3.c)式给出,基本上是相对功率密度乘以\(\sigma\),其中\(\sigma\)表示目标的雷达散射截面积,又称为 RCS。请注意,RCS 基本上是对雷达接收器的方向上目标反射雷达信号能力的度量。
接收天线处的功率密度现在将由(3.d)式给出,它与(3.c)式基本相同,只是包含了额外的\(4\pi d^{2}\)因数,以计算返回路径上的衰减:
现在,在接收天线处捕获的功率将由(3.e)式给出:
相较于(3.d)式,(3.e)式具有这里的额外因数,\(A_{RX}\),它是接收天线的有效孔径面积。这是对接收天线尽可能捕获接收的信号能力的度量。根据接收天线的增益和工作波长可以使用(3.f)式写出该孔径的影响:
将(3.f)式带入(3.e)式,我们最终得到这个用于计算在接收天线处,捕获的功率的表达式:
可以看到,该功率与发射功率以及发射和接收天线的增益成正比,与到目标的距离的四次方成反比。
接收器是否可以看到目标不仅取决于接收到的信号的功率,还取决于信号能量与噪声能量的比率,即信噪比或 SNR。下式是用于计算SNR 的公式,我们快速展示一下,而不对其加以证明:
我们已经在前面的讨论中获得了对接收到的信号功率的直观感受。即,SNR 与从设备输出的功率、发射和接收天线的增益成正比,设备的 RCS与距离的四次方成反比。
\(kTF\)是一个与在接收器处引入的噪声相关的项。它称为天线噪声,与天线的物理特性相关。\(F\)是接收器的噪声系数,它表示在雷达设备内部引入的额外噪声。\(k\)为玻尔兹曼常数,\(T\)为天线温度。
\(T_{\text{meas}}\)是总测量时间(处理增益)。对于 FMCW RADAR,一个具有 \(N\) 个线性调频脉冲并且每个脉冲具有持续时间 \(T_c\) 的 FMCW RADAR 帧,该测量时间为 \(N\times T_{c}\)。它的含义是,SNR 随着测量时间的增加而提高,其原因如下:随着测量时间增加,我们当然会在更长的时间段内观察到我们所需的信号以及我们不需要的噪声。但需要注意的关键点是,信号是确定的,而噪声是随机的。因此,随着输入信号经过雷达处理链,其中包含"range-FFT"以及"doppler-FFT",有用信号部分会前后一致地积累,而噪声部分往往会达到一个平均值。
请注意,存在检测物体所需的最小 SNR。我在这里将其称为 \(\text{SNR}_{\min}\)。这意味着,在距离速度图中检测到的 SNR 低于 \(\text{SNR}_{\min}\) 的任何目标将不被视为有效目标。该 \(\text{SNR}_{\min}\) 通常由系统设计人员加以选择,它是错过检测的可能性和发出错误警报的可能性之间的折衷。如果您为\(\text{SNR}_{\min}\)选择较高的值,那么您获得错误警报的可能性将非常低,但是,您也可能错过一些有效的检测。总之,一旦选择了\(\text{SNR}_{\min}\),就可以按照以下方法计算雷达可以看到的最大距离:
4. 问题
在前面的三个模块中,我们相当深入地探讨了FMCW RADAR 中的距离和速度估算。由此,我们了解到,如果两个物体与雷达的距离相等但具有相对于雷达不同的速度,那么这两个物体将在距离 FFT 中显示为单个峰值,但会由多普勒 FFT 分开。因此,它们将在 2D-FFT 图或距离速度图中显示为两个峰值。但如果两个物体与雷达的距离相同并且相对于雷达具有相同的速度,会怎么样?距离速度图将会是什么样呢?
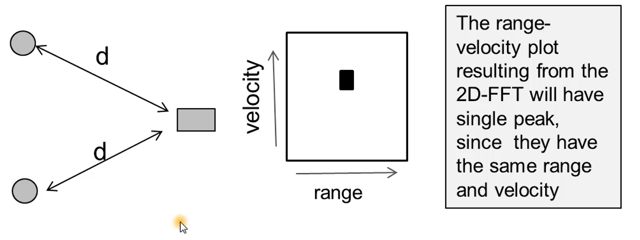
可以想象到通过该 2D-FFT产生的距离速度图将具有单个峰值,因为这两个物体相对于雷达具有相同的距离和速度。那么,我们怎么区分这两个物体呢?事实上,对于这种情况,您需要多个天线,以便能够估算这些物体的到达角。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号