【机器学习】kNN
机器学习算法——kNN
1. 算法原理
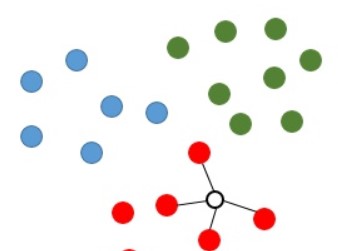
基本思想是物以类聚,相同类别的样本之间在特征空间中应当聚集在一起,因此对于新的数据点,根据其附近的K个邻居的类型可以对其进行预测。如下图所示,假设红、绿、蓝三种颜色的点分布在二维空间中,这对应着分类任务中的训练样点包含了3个类别,特征数量为2。如果现在我们希望推测图中空心圆的那个点是属于那个类别,那么kNN算法将会计算该待推测点与所有训练样点之间的距离,并且挑选出距离最小的k个样点(此处设定k=4),则图中与连接的4个点将被视为推测空心点(待推测点)类别的参考依据。显然,由于这4个点均为红色类别,则该待推测点即被推测为红色类别。
2. 算法实现[1][2]
kNN算法的瓶颈是如何寻找未知点x的K个最近邻。
- 暴力计算:计算出点x和数据集中所有点的距离,然后选出最近的K个,该方法对设备的存储和计算能力要求高,在数据集小的时候效果较好
- 索引:通过对数据集建立索引实现分支限界,减小搜索的范围。常用的索引结构有kd-tree/R-tree/ball-tree等,kd-tree在维数小于20时的效果较好
- 哈希:局部敏感哈希,通过选用合适的哈希函数,将相近的点映射到相近的子空间
本项目实现了暴力计算和kd-tree索引的kNN算法
2.1 kd-tree构造
kd树是一个二叉树结构,相当于不断的用垂线将k维空间进行切分,构成一系列的k维超矩形区域。kd-tree算法如下:
K维空间数据集\(T = \{x_i\}_{i=1}^N\),其中\(x_i = [x_i^{(1)}, x_i^{(2)}, ..., x_i^{(k)}]\)
- 构造根节点 :选择合适的坐标轴\(l\),将T中所有实例以\(x^{(l)}\)坐标为中位数,垂直轴切\(x^{(l)}\)成两个矩形,由根节点生成深度为1的左、右两个子节点:左子节点对应的坐标都小于切分点,右子节点坐标都大于切分点坐标。
- 重复:对深度为j的节点,选择合适的坐标轴,以该节点再次将矩形区域切分为两个子区域。
- 直到两个子区域没有实例存在时停止,从而形成kd-tree的区域划分。
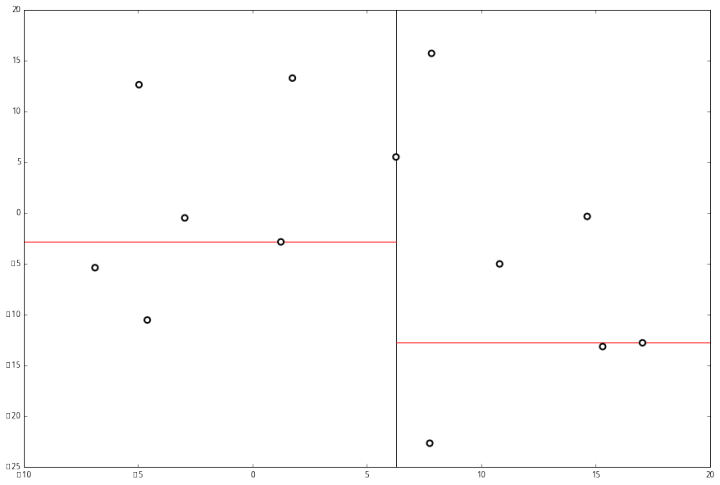
例子:首先随机在数据集中随机生成 13 个点作为我们的数据集

首先先沿 x 坐标进行切分,我们选出 x 坐标的中位点,获取最根部节点的坐标

并且按照该点的x坐标将空间进行切分,所有 x 坐标小于 6.27 的数据用于构建左分支,x坐标大于 6.27 的点用于构建右分支。

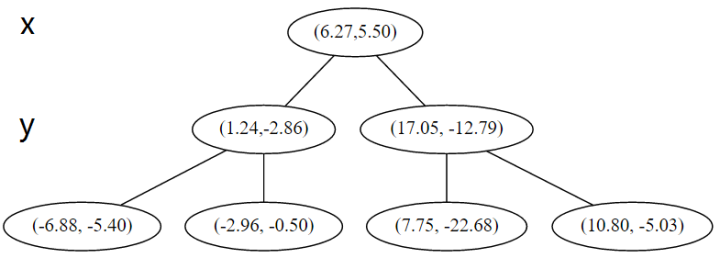
在下一步中\(r = 0 + 1 =1\ mod \ 2\),对应 y 轴,左右两边再按照 y 轴的排序进行切分,中位点记载于左右枝的节点。得到下面的树,左边的 x 是指这该层的节点都是沿 x 轴进行分割的。

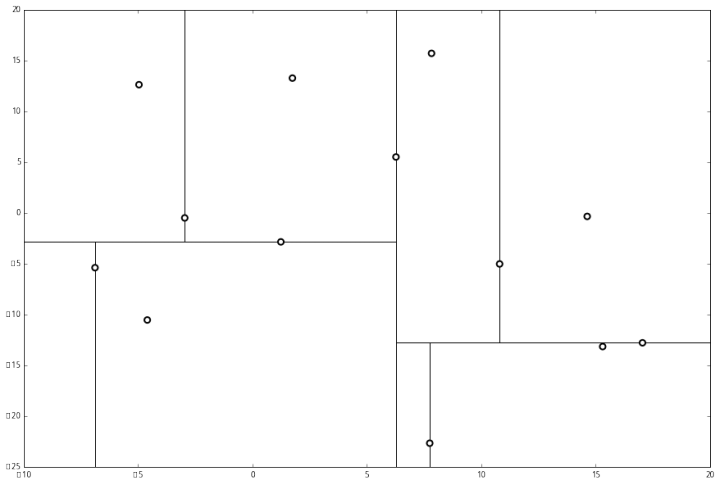
空间的切分如下:
下一步中,对应 x 轴,所以下面再按照 x 坐标进行排序和切分,有
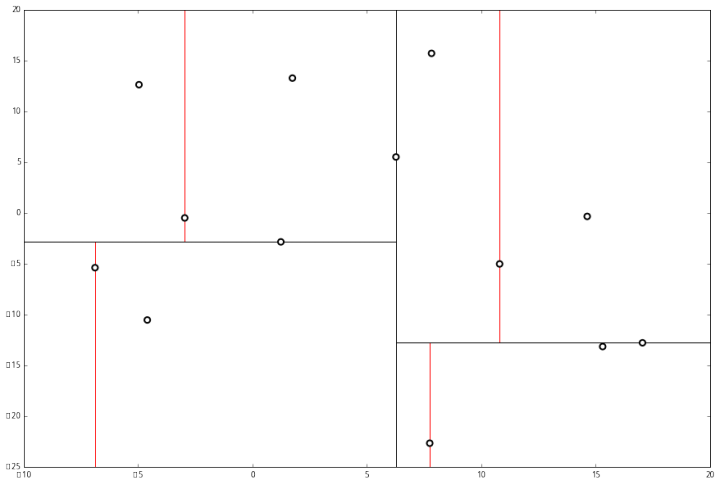
最后每一部分都只剩一个点,将他们记在最底部的节点中。因为不再有未被记录的点,所以不再进行切分。
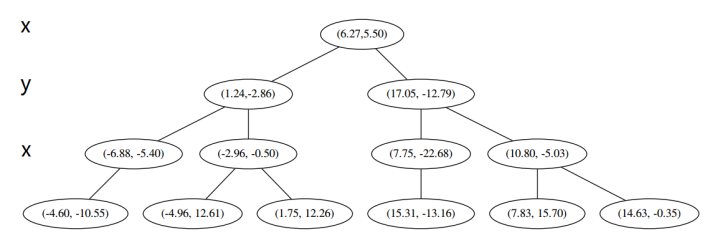
就此完成了 kd 树的构造。python代码如下:
class Node():
def __init__(self, data = -1, label = None, left = None, right = None, split = 0):
self.left = left
self.right = right
self.split = split
self.data = data
self.label = label
class kdTree():
def __init__(self, X, y):
self.dim = X.shape[1]
if(y.ndim == 1): y = np.expand_dims(y, 0)
data = np.hstack((X, y.reshape(-1, 1)))
self.root = self._create(data, 0)
def _create(self, dataset, p):
# 边界条件
if len(dataset) == 0: return None
# 寻找中位数,使用快速排序中的partition,复杂度为O(logn)
# numpy.argpartition(a, kth, axis=-1, kind='introselect', order=None)
mid = len(dataset) // 2
idxs = np.argpartition(dataset[:, p], mid)
# 建立当前节点
tmp = Node(data = dataset[idxs[mid]])
# 创建子节点
lchild = self._create(dataset[idxs[:mid],:], (p+1) % self.dim)
rchild = self._create(dataset[idxs[mid+1:],:], (p+1) % self.dim)
tmp.left, tmp.right = lchild, rchild
return tmp
def search(self, target, K):
pass
2.2 kd-tree查询
kd-tree加快查询的原理是根据数据集的空间位置信息,剪除一些搜索分支。以下图为例,在搜索红点的最近邻时,在红线右侧的点肯定比点A离红点更远,因为红线右侧区域到红点最近的距离是红点到红线的距离,而该距离已经比A和红点之间距离更大了。

k近邻查询算法如下:
- 从根结点出发,递归向下访问kd-tree,如果目标点x当前维小于切分点坐标,移动到左子节点,否则右子节点,直到子节点为叶子结点为止。
- 以此叶子结点为最近邻的点,插入到nearest[ ]中
- 递归向上回退,在这个节点进行以下操作:
- 如果该节点比nearest[ ]里的点更近,则替换nearest[ ]中距离最大的点。
- 目标点到此节点的分割线垂直的距离为d,判断nearest[ ]中距离最大的点与 d 相比较,如果比d大,说明d的另一侧区域中有可能有比nearest[ ]中距离要小,因此需要查看d的左右两个子节点的距离。 如果nearest[ ]中距离最大的点比 d小,那说明另一侧区域的点距离目标点的距离都比d大,因此不用查找了,继续向上回退。
- 当回退到根结点时,搜索结束,最后的nearest[ ]里的k个点,就是x的最近邻点。
代码实现既可以使用递归也可以使用迭代,在本项目中使用了迭代
def search(self, target, K):
# 记录搜索的路径
path = []
# 记录搜索过的节点、距离、标签等信息
nodes = []
dist = []
labels = []
if(K == 0 or self.root == None):
return nodes, labels, dist
# step1: 搜索叶子结点
tmp_node = self.root
while tmp_node:
path.append(tmp_node)
idx = tmp_node.split
if(target[idx] <= tmp_node.data[idx]):
tmp_node = tmp_node.left
else:
tmp_node = tmp_node.right
# step2: 回溯
max_index = 0
first_node = path[-1]
d = self._compute_dist(first_node.data[:-1], target)
nodes.append(first_node)
dist.append(d)
labels.append(first_node.data[-1])
while len(path)!= 0:
back_node = path.pop()
tmp_d = self._compute_dist(back_node.data[:-1], target)
# 已经到叶子节点
if(back_node.left == None and back_node.right == None):
if(back_node != first_node):
if(len(nodes) < K or tmp_d < dist[max_index]):
if(len(nodes) < K):
dist.append(tmp_d)
nodes.append(back_node)
labels.append(back_node.data[-1])
if(len(nodes) == K):
max_index = np.argmax(dist)
else:
dist[max_index] = tmp_d
nodes[max_index] = back_node
labels[max_index] = back_node.data[-1]
max_index = np.argmax(dist)
# 非叶子节点
else:
# 判断是否加入父节点
if(len(nodes) < K or tmp_d < dist[max_index]):
if(len(nodes) < K):
dist.append(tmp_d)
nodes.append(back_node)
labels.append(back_node.data[-1])
if(len(nodes) == K):
max_index = np.argmax(dist)
else:
dist[max_index] = tmp_d
nodes[max_index] = back_node
labels[max_index] = back_node.data[-1]
max_index = np.argmax(dist)
#step3: 判断是否需要进入另一个分支
tmp_idx = back_node.split
if(len(nodes) < K or
abs(back_node.data[tmp_idx]-target[tmp_idx]) <= dist[max_index]):
if(target[idx] <= back_node.data[tmp_idx]):
child_node = back_node.right
else:
child_node = back_node.left
while(child_node != None):
path.append(child_node)
if(target[child_node.split] <= child_node.data[child_node.split]):
child_node = child_node.left
else:
child_node = child_node.right
return nodes, labels, dist
def _compute_dist(self, x, y):
return np.sum((x - y) ** 2)
2.3 kNN算法实现
kNN算法没有训练过程,如果使用索引,在训练过程建立对应的索引即可。在预测阶段分为两个部分:计算K近邻、根据K近邻的标签进行投票
class kNN():
def __init__(self, K, method = "scan"):
self.K = K
self.method = method
def train(self, X, y):
self.X = X
self.y = y
if self.method == "kd-tree":
self.tree = kdTree(X, y)
def test(self, x):
if x.ndim == 1:
x = np.expand_dims(x, axis = 0)
labels = []
y_preds = [0]*x.shape[0]
# 顺序扫描
if self.method == "scan":
for i in range(x.shape[0]):
dist = []
label = []
max_index = 0
for j in range(self.X.shape[0]):
tmp_d = np.sum((x[i]-self.X[j]) ** 2)
if len(dist) < self.K:
dist.append(tmp_d)
label.append(self.y[j])
if(len(dist) == self.K):
max_index = np.argmax(dist)
elif(tmp_d < dist[max_index]):
dist[max_index] = tmp_d
label[max_index] = self.y[j]
max_index = np.argmax(dist)
labels.append(label)
# 使用kd-tree
elif self.method == "kd-tree":
for i in range(x.shape[0]):
_, label, _ = self.tree.search(x[i], self.K)
labels.append(label)
# 直接向量化计算
else:
dist = np.sum(np.power(x,2), axis = -1, keepdims = True) - 2 * np.dot(x, self.X.T) + np.sum(self.X ** 2, axis = -1).T
if dist.ndim == 1:
dist = np.expand_dims(dist, axis = 0)
top_K_index = np.argsort(dist, axis = -1)[:, :self.K]
labels = self.y[top_K_index]
labels = np.array(labels)
for i in range(x.shape[0]):
y_preds[i] = self._vote(labels[i,:])
return np.array(y_preds)
# 对标签进行投票
def _vote(self, ys):
ys_unique = np.unique(ys)
vote_dict = {}
for y in ys:
if y not in vote_dict.keys():
vote_dict[y] = 1
else:
vote_dict[y] += 1
sorted_vote_dict = sorted(vote_dict.items(), key=operator.itemgetter(1), reverse=True)
return sorted_vote_dict[0][0]
3. 算法测试[3]
数据集:breast_cancer数据集(预测是否患乳腺癌)
模型:sklearn内置kNN、线性搜索+kNN、kd-tree+kNN、暴力计算+kNN
from knn import *
from time import time
from sklearn.datasets import load_breast_cancer
from sklearn.model_selection import train_test_split
from sklearn.neighbors import KNeighborsClassifier
# 导入数据集
data = load_breast_cancer()
x = data.data
y = data.target
# 划分数据集
Xtrain,Xtest,Ytrain,Ytest = train_test_split(x,y,test_size =0.2) #2/8分
# 创建分类器,最近邻K=5
clf = KNeighborsClassifier(n_neighbors=5, algorithm='kd_tree') #实例化 #里面的参数:超参数
clf1 = kNN(5, "scan")
clf2 = kNN(5, "kd-tree")
clf3 = kNN(5, "vector")
# 训练
clf.fit(Xtrain, Ytrain)
clf1.train(Xtrain, Ytrain)
clf2.train(Xtrain, Ytrain)
clf3.train(Xtrain, Ytrain)
# 预测并测试时间
t0 = time()
y_pred = clf.predict(Xtest)
t1 = time()
y_pred1 = clf1.test(Xtest)
t2 = time()
y_pred2 = clf2.test(Xtest)
t3 = time()
y_pred3 = clf3.test(Xtest)
t4 = time()
def acc(y, y_pred):
return np.sum(y == y_pred) / len(y)
# 计算准确率
acc0 = acc(Ytest, y_pred)
acc1 = acc(Ytest, y_pred1)
acc2 = acc(Ytest, y_pred2)
acc3 = acc(Ytest, y_pred3)
# 打印结果
print("sklearn: {0}, {1}s".format(acc0, t1-t0))
print("scan: {0}, {1}s".format(acc1, t2-t1))
print("kd-tree: {0}, {1}s".format(acc2, t3-t2))
print("vector: {0}, {1}s".format(acc3, t4-t3))
结果:

kd树比线性扫描还慢。。。。看来还需要好好优化
Ref
-------------------------------------------
个性签名:只要想起一生中后悔的事,梅花便落满了南山
如果觉得这篇文章对你有小小的帮助的话,记得在右下角点个“推荐”哦,博主在此感谢!

 浙公网安备 33010602011771号
浙公网安备 33010602011771号