机器人ROS系统学习随笔->6《ROS机器人系统设之机器人Moveit!机械臂控制》
Movelt!系统架构


MoveIt!是什么


系统架构--插件机制

系统架构--运动规划器

系统架构--规划场景模块的结构

MoveIt!的使用步骤

![]()
机械臂模型--宏定义

机械臂模型--link与joint

机械臂模型--可视化


MoveIt! Setup Assistant工具

问题注意
这里catkin编译发现少资料。看编译错误百度包的名字到Wiki上找包,发现ros包中没有集成,到wiki上找到包的源,到GitHub上下载包放到工程文件中就可以了。
配置生成功能包
1、找到模型文件加载

2、设置碰撞检测采样点

3、虚拟关节

4、配置机械臂规划组(重要)

5、配置夹爪规划组

6、完成规划组配置后

7、自定义点位

8、终端夹具的配置

9、作者信息

10、生成配置功能包

生成的配置文件

启动damo

机械臂拖动规划

任意目标点

加入场景物体

MoveIt!编程基础

MoveIt!两种编程接口

MoveIt!编程基础--关节空间规划(python代码)

MoveIt!编程基础--工作空间规划

出错了在重新运行下,因为这个不是最好的运动求解器。另外还有ik_fast(数值解)、trac_ik(解析解)两个求解器比较好。
MoveIt!编程基础--笛卡尔路径规划

MoveIt!编程基础--自主避障

Moveit教程在官网上都能找到历程
API接口:moveit.ros.org

MoveIt教程:docs.ros.org

Gazebo机械臂仿真


用moveit控制器来控制gazebo模型—配置



controller_manager_ns: controller_manager
controller_list:
- name: arm/arm_joint_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- joint1
- joint2
- joint3
- joint4
- joint5
- joint6
- name: arm/gripper_controller
action_ns: follow_joint_trajectory
type: FollowJointTrajectory
default: true
joints:
- finger_joint1
- finger_joint2

启动仿真环境



ROS-I框架介绍


基于ROS-I框架的应用(Kungfu Arm)

小结



 浙公网安备 33010602011771号
浙公网安备 33010602011771号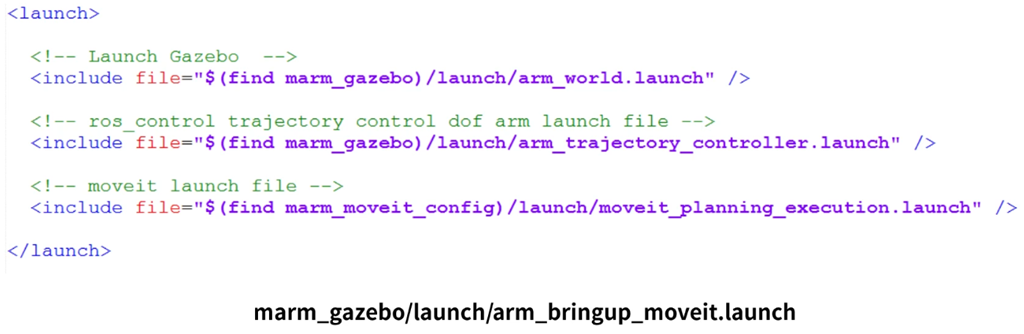{kind=link}