进程理论
进程
【一】什么是进程
- 正在进行的一个过程或者说一个任务。
- 而负责执行任务则是cpu。
【二】进程与程序的区别
- 程序仅仅只是一堆代码而已
- 而进程指的是程序的运行过程。
【三】进程的调度问题
- CPU 调度进程
【1】什么是调度算法
- 要想多个进程交替运行
- 操作系统必须对这些进程进行调度
- 这个调度也不是随即进行的,而是需要遵循一定的法则
- 由此就有了进程的调度算法。
【2】先来先服务算法
(1)理论
- 先来先服务(FCFS)调度算法是一种最简单的调度算法
(2)适用场景
- 该算法既可用于作业调度,也可用于进程调度。
- FCFS算法比较有利于长作业(进程),而不利于短作业(进程)。
- 由此可知,本算法适合于CPU繁忙型作业,而不利于I/O繁忙型的作业(进程)。
【3】短作业优先调度算法
(1)理论
- 短作业(进程)优先调度算法(SJ/PF)是指对短作业或短进程优先调度的算法
(2)适用场景
- 该算法既可用于作业调度,也可用于进程调度。
- 但其对长作业不利;
- 不能保证紧迫性作业(进程)被及时处理;
- 作业的长短只是被估算出来的。
【4】时间片轮转法
(1)理论
- 时间片轮转(Round Robin,RR)法的基本思路是让每个进程在就绪队列中的等待时间与享受服务的时间成比例。
- 在时间片轮转法中,需要将CPU的处理时间分成固定大小的时间片
- 例如,几十毫秒至几百毫秒。
- 如果一个进程在被调度选中之后用完了系统规定的时间片,但又未完成要求的任务,则它自行释放自己所占有的CPU而排到就绪队列的末尾,等待下一次调度。
- 同时,进程调度程序又去调度当前就绪队列中的第一个进程。
- 显然,轮转法只能用来调度分配一些可以抢占的资源。
- 这些可以抢占的资源可以随时被剥夺,而且可以将它们再分配给别的进程。CPU是可抢占资源的一种。
- 但打印机等资源是不可抢占的。
(2)适用场景
- 由于作业调度是对除了CPU之外的所有系统硬件资源的分配,其中包含有不可抢占资源,所以作业调度不使用轮转法。
- 在轮转法中,时间片长度的选取非常重要。
- 首先,时间片长度的选择会直接影响到系统的开销和响应时间。
- 如果时间片长度过短,则调度程序抢占处理机的次数增多。
- 这将使进程上下文切换次数也大大增加,从而加重系统开销。
- 反过来,如果时间片长度选择过长
- 例如,一个时间片能保证就绪队列中所需执行时间最长的进程能执行完毕
- 则轮转法变成了先来先服务法。
- 首先,时间片长度的选择会直接影响到系统的开销和响应时间。
- 时间片长度的选择是根据系统对响应时间的要求和就绪队列中所允许最大的进程数来确定的。
- 在轮转法中,加入到就绪队列的进程有3种情况:
- 一种是分给它的时间片用完,但进程还未完成,回到就绪队列的末尾等待下次调度去继续执行。
- 另一种情况是分给该进程的时间片并未用完,只是因为请求I/O或由于进程的互斥与同步关系而被阻塞。当阻塞解除之后再回到就绪队列。
- 第三种情况就是新创建进程进入就绪队列。
- 如果对这些进程区别对待,给予不同的优先级和时间片从直观上看,可以进一步改善系统服务质量和效率。
- 例如,我们可把就绪队列按照进程到达就绪队列的类型和进程被阻塞时的阻塞原因分成不同的就绪队列,每个队列按FCFS原则排列,各队列之间的进程享有不同的优先级,但同一队列内优先级相同。
- 这样,当一个进程在执行完它的时间片之后,或从睡眠中被唤醒以及被创建之后,将进入不同的就绪队列。
【5】多级反馈队列
(1)理论
- 前面介绍的各种用作进程调度的算法都有一定的局限性。
- 如短进程优先的调度算法,仅照顾了短进程而忽略了长进程,而且如果并未指明进程的长度,则短进程优先和基于进程长度的抢占式调度算法都将无法使用。
- 而多级反馈队列调度算法则不必事先知道各种进程所需的执行时间,而且还可以满足各种类型进程的需要,因而它是目前被公认的一种较好的进程调度算法。
(2)调度算法的实施过程
- 在采用多级反馈队列调度算法的系统中,调度算法的实施过程如下所述。
[1]为多个就绪队列设置优先级
- 应设置多个就绪队列,并为各个队列赋予不同的优先级。
- 第一个队列的优先级最高,第二个队列次之,其余各队列的优先权逐个降低。
- 该算法赋予各个队列中进程执行时间片的大小也各不相同,在优先权愈高的队列中,为每个进程所规定的执行时间片就愈小。
- 例如,第二个队列的时间片要比第一个队列的时间片长一倍,……,第i+1个队列的时间片要比第i个队列的时间片长一倍。
[2]新进程等待调用
- 当一个新进程进入内存后
- 首先将它放入第一队列的末尾,按FCFS原则排队等待调度。
- 当轮到该进程执行时,如它能在该时间片内完成,便可准备撤离系统;
- 如果它在一个时间片结束时尚未完成,调度程序便将该进程转入第二队列的末尾,再同样地按FCFS原则等待调度执行;
- 如果它在第二队列中运行一个时间片后仍未完成,再依次将它放入第三队列,……,如此下去,当一个长作业(进程)从第一队列依次降到第n队列后,在第n 队列便采取按时间片轮转的方式运行。
[3]按顺序调度队列
- 仅当第一队列空闲时,调度程序才调度第二队列中的进程运行;
- 仅当第1~(i-1)队列均空时,才会调度第i队列中的进程运行。
- 如果处理机正在第i队列中为某进程服务时,又有新进程进入优先权较高的队列(第1~(i-1)中的任何一个队列)
- 则此时新进程将抢占正在运行进程的处理机
- 即由调度程序把正在运行的进程放回到第i队列的末尾
- 把处理机分配给新到的高优先权进程。
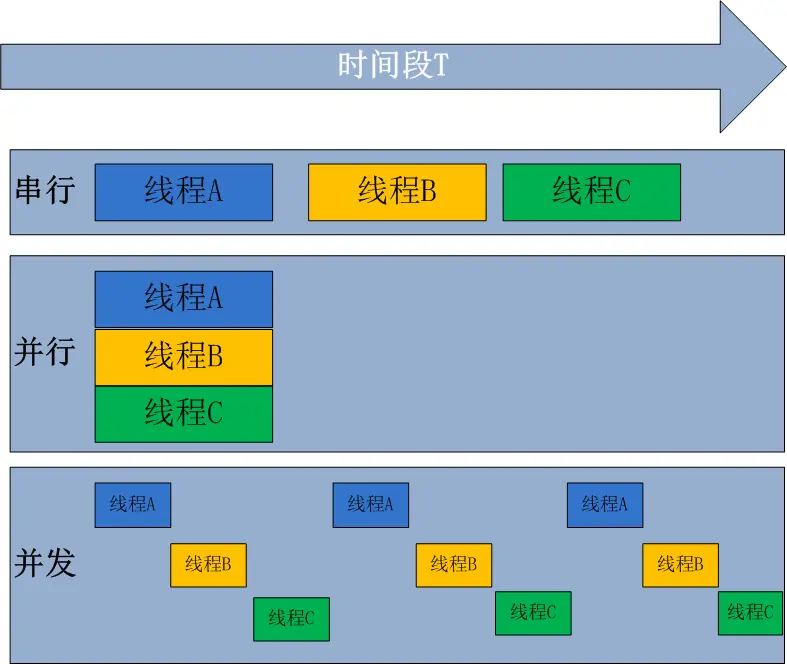
【四】串行,并发,并行
【1】串行
- 按照顺序一个个的执行
【2】并发
- 是伪并行,即看起来是同时运行。
- 单个cpu+多道技术就可以实现并发,(并行也属于并发)
【3】并行
-
同时运行
- 只有具备多个cpu才能实现并行
【五】同步/异步&阻塞/非阻塞(重点)
【1】同步
- 所谓同步
- 就是在发出一个功能调用时,在没有得到结果之前,该调用就不会返回。
- 按照这个定义,其实绝大多数函数都是同步调用。
- 但是一般而言,我们在说同步、异步的时候,特指那些需要其他部件协作或者需要一定时间完成的任务。
【2】异步
- 异步的概念和同步相对。
- 当一个异步功能调用发出后,调用者不能立刻得到结果。
- 当该异步功能完成后,通过状态、通知或回调来通知调用者。
- 如果异步功能用状态来通知
- 那么调用者就需要每隔一定时间检查一次
- 效率就很低(有些初学多线程编程的人,总喜欢用一个循环去检查某个变量的值,这其实是一 种很严重的错误)。
- 如果是使用通知的方式
- 效率则很高
- 因为异步功能几乎不需要做额外的操作。
- 如果异步功能用状态来通知
- 至于回调函数,其实和通知没太多区别。
【3】阻塞
- 阻塞调用是指调用结果返回之前,当前线程会被挂起(如遇到io操作)。
- 函数只有在得到结果之后才会将阻塞的线程激活。
- 有人也许会把阻塞调用和同步调用等同起来,实际上他是不同的。
- 对于同步调用来说,很多时候当前线程还是激活的,只是从逻辑上当前函数没有返回而已。
【六】进程的创建和状态
【1】引入
- 但凡是硬件,都需要有操作系统去管理
- 只要有操作系统,就有进程的概念
- 就需要有创建进程的方式
- 一些操作系统只为一个应用程序设计
- 比如微波炉中的控制器
- 一旦启动微波炉
- 所有的进程都已经存在。
- 而对于通用系统(跑很多应用程序)
- 需要有系统运行过程中创建或撤销进程的能力
- 主要分为4种形式创建新的进程
【2】通用系统创建新进程的4种形式
- 系统初始化
- 进程中开启子进程
- 交互式请求
- 批处理作业的初始化
【3】什么是进程的状态
- 进程状态反映进程执行过程的变化。
- 这些状态随着进程的执行和外界条件的变化而转换。
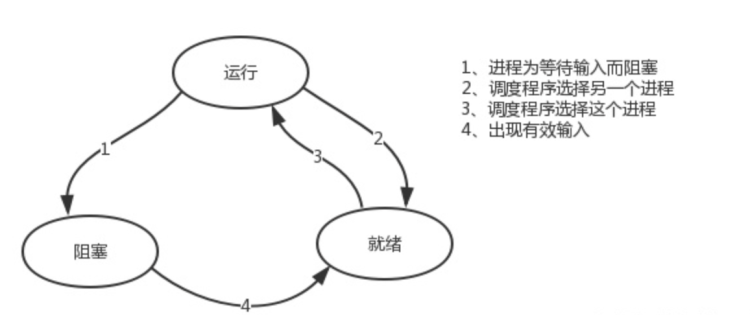
三态模型
- 在三态模型中,进程状态分为三个基本状态,
- 即运行态
- 就绪态
- 阻塞态
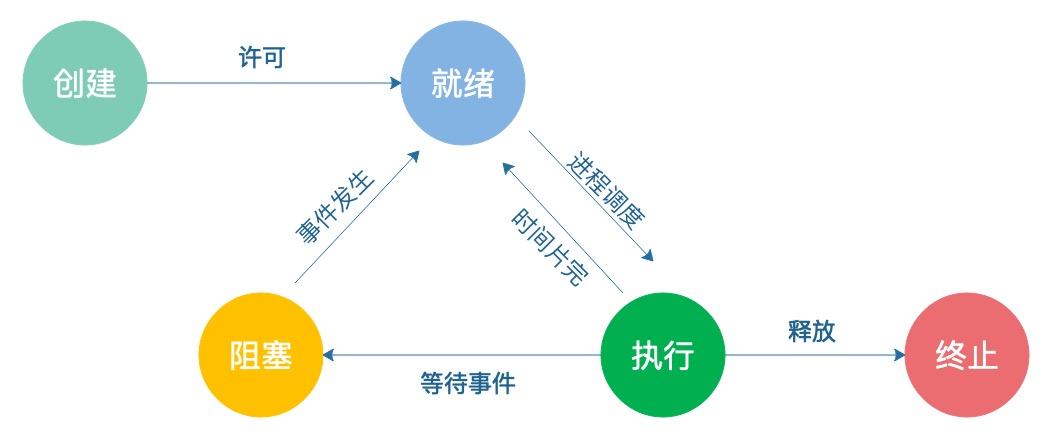
五态模型
- 在五态模型中,进程分为
- 新建态、
- 终止态,
- 运行态,
- 就绪态,
- 阻塞态。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号