Linux内核驱动学习(七)应用层直接操作GPIO
简介
前面通过libgpio的方式介绍了内核空间对GPIO进行操作的接口,其做了较好的封装,同时Linux系统的sysfs机制已经在系统路径下/sys/class/gpio注册了相应的节点,通过读写该节点下的文件就能轻松的完成GPIO输入输出配置以及引脚状态的获取。
原理图
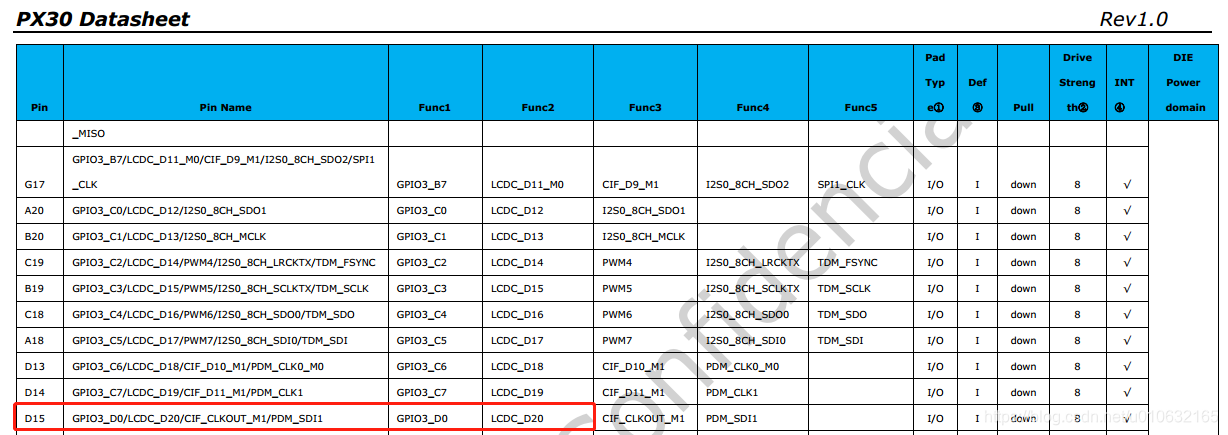
我使用的Rockchip的px30,引脚是GPIO3_D0,具体硬件肯定会不同,注意参考soc的datasheet和硬件原理图,先定位正确需要操作的GPIO,千里之行始于足下。
节点
在/sys/class/gpio路径下有export和unexport这两个文件;GPIO3_D0在这里是120,具体硬件和数字的对应关系后面会继续讲到;
echo 120 > /sys/class/gpio/export
执行以上这条指令后,会在/sys/class/gpio/下生成gpio120节点,简单看一下该路径下都有哪些文件;
$ /sys/class/gpio/gpio120
$ active_low device direction edge power subsystem uevent value
设置为输出
$ cd /sys/class/gpio/gpio120
$ echo 0 > active_low
$ echo out > direction
$ echo 1 > value #输出高
$ echo 0 > value #输出低
另一种情况,设置active_low为1,就会出现另一种情况;
$ cd /sys/class/gpio/gpio120
$ echo 1 > active_low
$ echo out > direction
$ echo 1 > value #输出低
$ echo 0 > value #输出高
由此看出,active_low的作用已经很明显了,后面没有特别指出的情况下,active_low的值默认为0;一表胜过千言万语,简单整理一个表格,如下所示;
| active_low | value | 实际GPIO输出 |
|---|---|---|
| 0 | 1 | high |
| 0 | 0 | low |
| 1 | 1 | low |
| 1 | 0 | high |
设置为输入
$ cd /sys/class/gpio/gpio120
$ echo int > direction
$ cat value #读取GPIO的电平状态
映射关系
Rockchip px30平台的GPIO总共分为GPIO0~GPIO3四组,每一组最多有32个GPIO,依次分为A,B,C,D四个小组,每组最多8个,对于硬件上实际没有达到8个的情况下,计算偏移的时候,也按照8来计算。RK平台可以参考dt-bindings/pinctrl/rockchip.h。其他平台的话,如果有源代码可以参考以下厂商给出的具体定义,并结合SOC的原理图和硬件原理图,来计算。
具体计算如下表所示;依次类推;
| 引脚 | 计算 |
|---|---|
| GPIO3_D0 | 3*32 + 3*8 + 0 = 120 |
| GPIO3_D1 | 3*32 + 3*8 + 1 = 121 |
| GPIO2_A1 | 2*32 + 0*8 + 1 = 65 |

debugfs
debugfs 是 Linux系统下为了方便驱动开发人员对驱动调试的文件系统。
$ cat /sys/kernel/debug/gpio
可以通过debugfs查看gpio-120硬件上的实际输出和软件上是否相符合;

pwm demo
强迫症的我简单写了一个模拟pwm的shell,虽然比较鸡肋,因为是占空比,频率都是不可调的,单纯是为了看一下控制的效果,前提是已经执行echo 120 > export这条指令并且成功生成相应的节点,代码简单如下;
#!/bin/bash
GPIO=120
i=0
value=0
while [ 1 -eq 1 ]
do
i=$(($i + 1))
if [ $(( $i % 2 )) -eq 0 ]
then
value=0
else
value=1
fi
echo "current i is $i"
echo "current value is $value"
echo $value > /sys/class/gpio/gpio$GPIO/value
usleep 1000
done
用示波器测量GPIO3_D0引脚的波形,和预期的一样;


 浙公网安备 33010602011771号
浙公网安备 33010602011771号