树莓派3b 2020 buster版配置OpenCV4 从无到有
由于最近需要做一些东西来丰富我这无处安放的寂寞灵魂,想起了我这落灰的raspberryPi 3b。想想做个跟踪云台什么的,本着自顶向下的设计理念,第一步我选择配置下上位机--树莓派3b(...)。小黑镇楼。
感叹一下树莓派的设计,只需几个内存卡,就可以实现不同系统在一台机器上使用,更换系统重新烧录一个卡就ok了,嘤嘤嘤。
那么第一步就是为我的树莓派烧录系统了,Linux下采用dd方式,这显然对于原生Windows用户不太友好,所以采用----Win32DiskImager-0.9.5-binary

附上下载链接:https://sourceforge.net/projects/win32diskimager/
插入读卡器,查看下磁盘号:
我这里是磁盘2

在使用win32diskimager之前需要清理一波内存卡,让它变得干干净净的
所以搓一波澡:
Win+R 打开cmd输入diskpart
选择磁盘:select disk 2
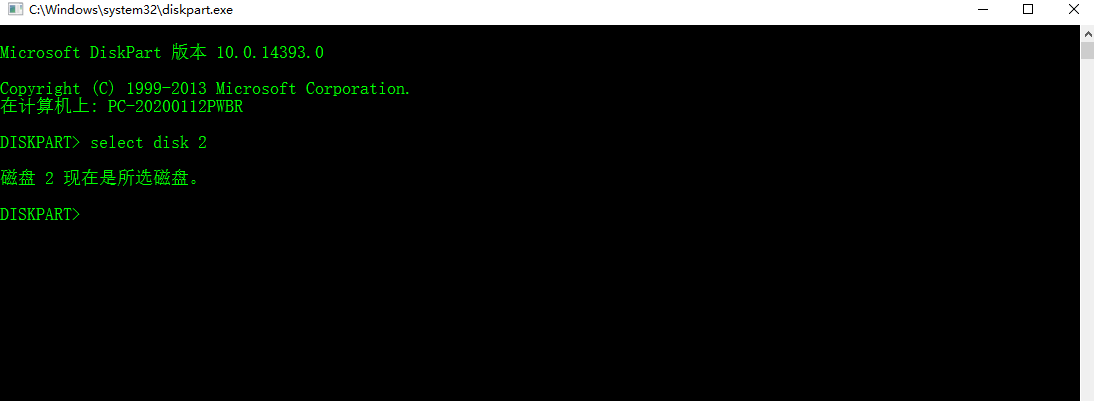
清理命令:clean

现在磁盘是干干净净的磁盘了,需要去分配一波(在diskpart也可以,但是我不糊,所以去磁盘管理分配一波):
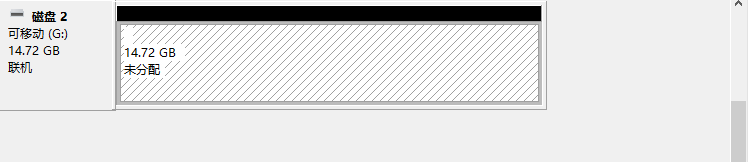
右键这个-新建简单卷-然后一直下一步就ok。
这个是分配好的: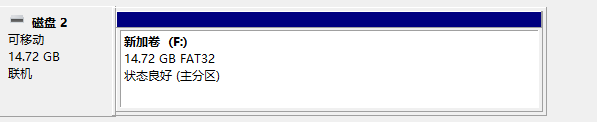
准备好镜像,这里使用的是树莓派官方系统:https://www.raspberrypi.org/downloads/(如果有**会更快一些)
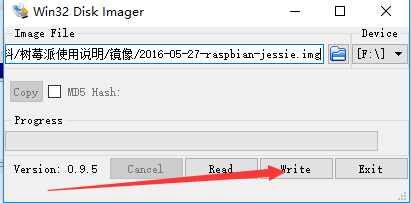
点击write就能进行烧录,非常的方便(方言版)
注:这个图是后补的我用的是2020 buster版系统,这个后面的名字关系到一会的换源。
A few minutes later.........................................................................................................
现在插入内存卡开机吧
如果屏幕不匹配的话去config.txt配置下
----------------------------------------------------------------------------------分隔线-----------------------------------------------------------------------------------------------------------------
树莓派一般都是不带屏幕的,常使用VNC或者SSH连接
VNC连接的话需要先安装下xrdp
#sudo apt-get install xrdp
然后使用Windows自带的远程桌面就可以连接了
因为有小屏幕所以很方便就能知道树莓派的ip地址,连接之前先开启以下ssh
#service ssh start
查看下ip
#ifconfig
打开xshell配置下:
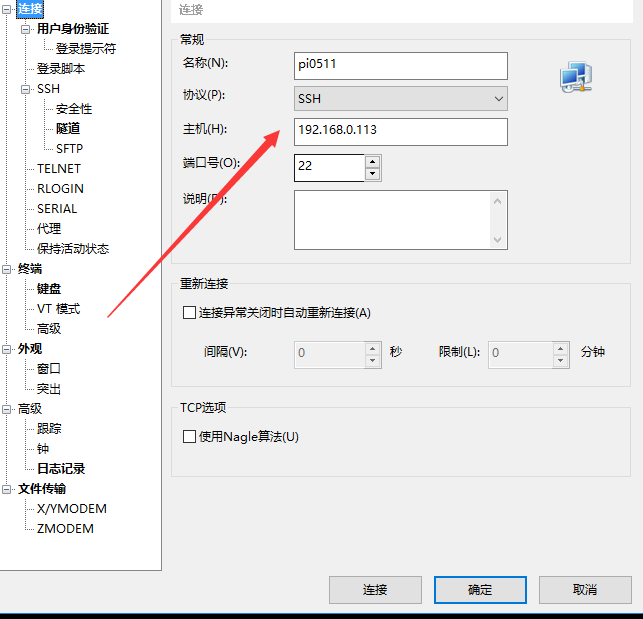
主机那里填上ip
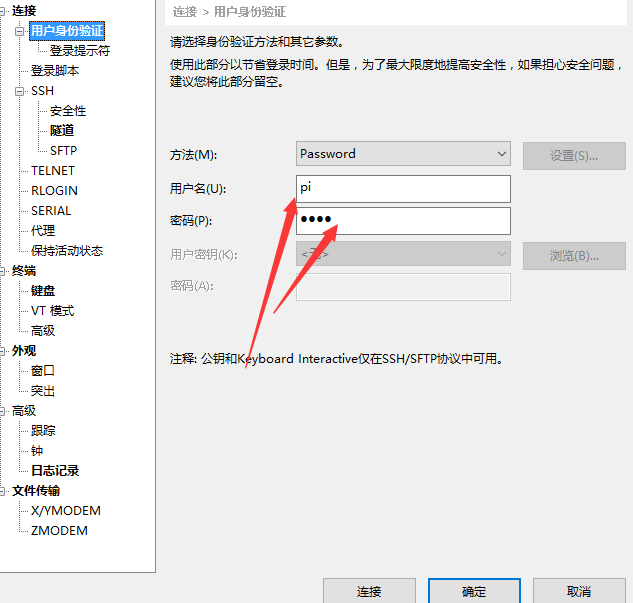
然后分别填上用户名和密码就可以连接了。
使用全部内存:
#sudo raspi-config
选择这个
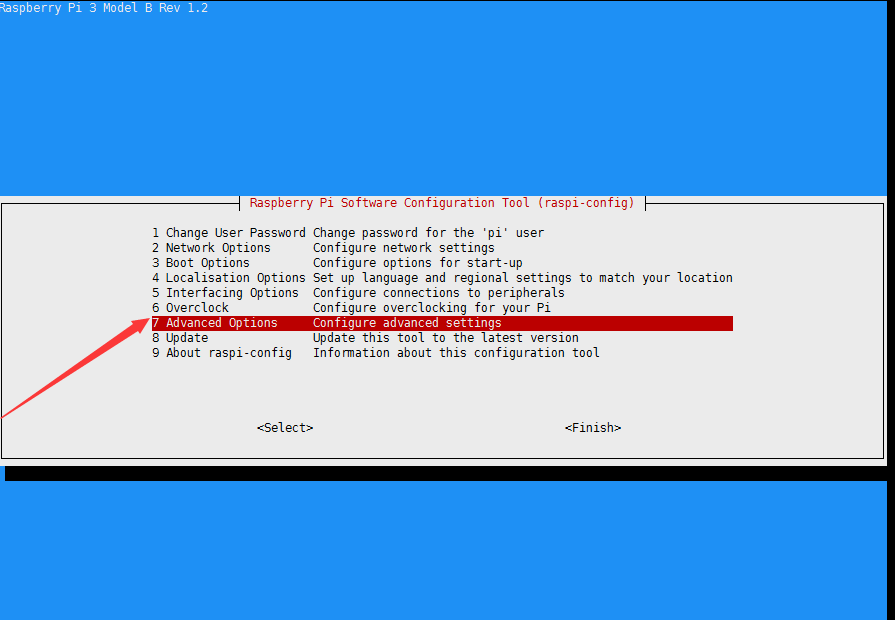
enter选择
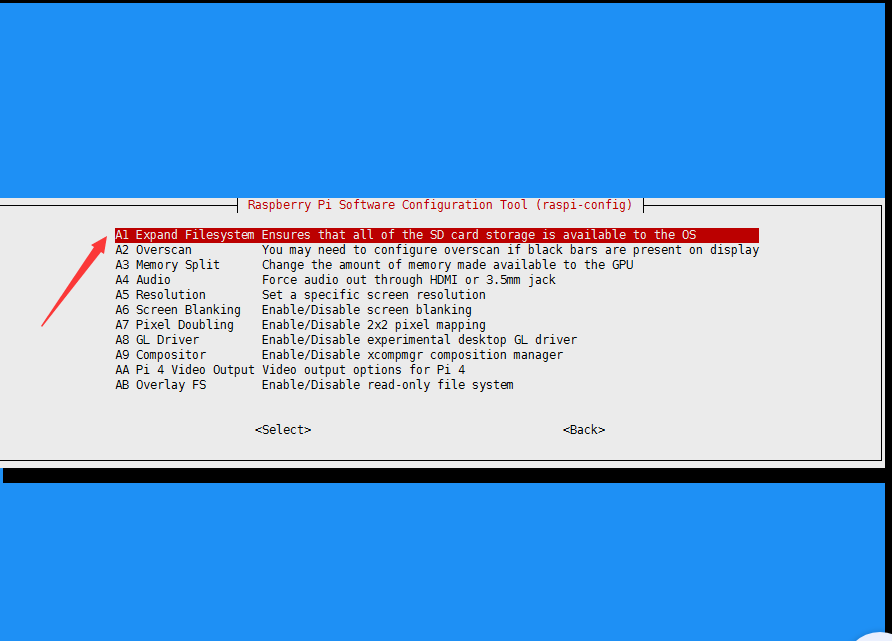
等待配置完成,重启。
更换源
#sudo nano /etc/apt/sources.list
注销掉以前的,加入新的
deb http://mirrors.ustc.edu.cn/raspbian/raspbian/ buster main contrib non-free rpi
:

#sudo nano /etc/apt/sources.list.d/raspi.list
#注释掉旧的加入-
deb http://mirrors.tuna.tsinghua.edu.cn/raspberrypi/ buster main ui
deb-src http://mirrors.tuna.tsinghua.edu.cn/raspberrypi/
buster main ui

更新下:
#sudo apt-get update #sudo apt-get upgrade
安装OpenCV依赖库
#sudo apt-get install build-essential cmake git pkg-config #sudo apt-get install libjpeg8-dev #sudo apt-get install libtiff5-dev #sudo apt-get install libjasper-dev #sudo apt-get install libpng12-dev #sudo apt-get install libavcodec-dev libavformat-dev libswscale-dev libv4l-dev #sudo apt-get install libgtk2.0-dev #sudo apt-get install libatlas-base-dev gfortran
下载OpenCV源码
#git clone https://github.com/opencv/opencv.git
如果慢的话去网页下载然后解压。
#unzip opencv-xxx.zip //xxx对应你下载包的版本
然后进入这个目录
#mkdir build //建立一个构建目录 #cd build/ ##cmake -D CMAKE_BUILD_TYPE=RELEASE \ -D CMAKE_INSTALL_PREFIX=/usr/local .. #sudo make #sudo make install #sudo ldconfig //更新链接库
安装完之后查看下版本:
#pkg-config opencv --modversion

Test
新建test.py 同级目录下放个图片
# -*- coding: utf-8 -*- #author : ULis import cv2 srcImg = cv2.imread('test.jpg',0) cv2.imshow('g i r l', srcImg) cv2.waitKey(0) cv2.destroyAllWindows()
国际案例都放linea 哈哈那这次就放小黑吧
总结:如果不是闲的没事,不要在树莓派(新版4b的话不清楚)上编译了,我擦坏了两张存储卡了,而且巨慢,就这样,over。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号