


一、Eigen 基本功能测试
1. 基本调用编译流程
1.1.1 程序编写
#include <iostream>
#include <Eigen/Dense>
using Eigen::MatrixXd;
int main()
{
MatrixXd m(2,2);
m(0,0) = 3;
m(1,0) = 2.5;
m(0,1) = -1;
m(1,1) = m(1,0) + m(0,1);
std::cout << m << std::endl;
}
1.1.2 编译执行
g++ -I /home/pi/WorkSpace/eigen eigen_demo.c -o eigen_demo
执行结果如下:

1.1.3 Eigen项目编译
- 下载Eigen官网的程序安装包
- 解压安装包并进入安装包:
cd ./eigen && mkdir cmake_test && cd cmake_test - 执行 cmake 命令:
cmake ../ - 开始编译并安装:
make && make install
![image]()

2. Eigen各模块调用测试
Eigen基础使用库函数 官方文档翻译 Markdown
- Core:Matrix和Array类,基础的线性代数运算和数组操作;
- Geometry:旋转,平移,缩放,2维和3维的各种变换;
- LU:求逆,行列式,LU分解;
- Cholesky:LLT和LDLT Cholesky分解;
- Householder:Householder变换;
- SVD:SVD分解;
- QR:QR分解。
- Eigenvalues:特征值,特征向量分解。
- Sparse:稀疏矩阵的存储和运算。
- Dense:包含了Core、Geometry、LU、Cholesky、SVD、QR、Eigenvalues等模块。
- Eigen:包含了Dense和Sparse模块。
1.2.1 矩阵基本运算
Eigen::MatrixXf matrix1(2, 3);
Eigen::MatrixXf matrix2(2, 3);
Eigen::Vector3f vec1;
matrix1 << 1, 2, 3, 4, 5, 6;
matrix2 << 7, 8, 9, 10, 11, 12;
vec1 << 1.1 , 2.1, 4.2;
-
矩阵加减乘除,尺度缩放
matrix1 + matrix2 matrix1 - matrix2 // 维度相同的矩阵何向量可以加减 matrix1 * 2 // Scale 尺度因子缩放 matrix1 / 2 // Scale 尺度因子缩放 Eigen::MatrixXf matrix3(3,2); matrix3 * matrix2 // 前一个矩阵列数需要与下一个矩阵的行数相同才能计算 Eigen::Vector3d v(1, 2, 3); Eigen::Vector3d w(0, 1, 2); cout << "Cross product:\n" << v.cross(w) << endl; // 向量叉乘 cout << "Cross product:\n" << v.dot(w) << endl; // 向量点乘 Eigen::VectorXd w(4); Eigen::MatrixXd M(4,4); M = MatrixXd::Random(4,4); cout << M * w << endl; -
矩阵转置、共轭、共轭转置
matrix1.transpose() // 直接调用类接口进行矩阵的转置 matrix1.conjugate() // 矩阵共轭 matrix1.adjoint() // 矩阵共轭 + 转置 -
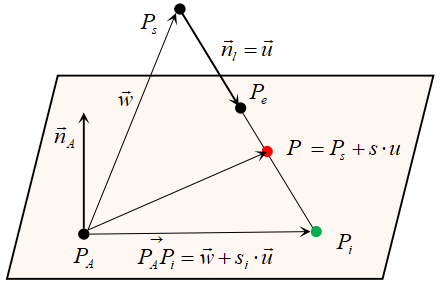
空间直线与平面的交点
![image]()
- 直线的定义:
- 确定空间直线上的两个点,一个作为起始点 \(P_s\) ,一个作为终止点 \(P_e\)
- 通过起始点和终止点计算直线的方向向量: \(\vec{n_l} = P_e - P_s\)
- 直线方程的向量表示为:\(l:P = P_s + s\cdot \vec{n_l}\)
- 平面的定义:
- 确定平面上的一个点 \(P_A\),确定一个平面的法向量 \(\vec{n_A}\)
- 平面的方程表示为: \(\vec{n_A}\cdot(P-P_A) = 0\)
- 平面与直线的交点定义:
- 直线与平面平行时 (\(\vec{n_l} \perp \vec{n_A}\)),当直线上的某一点在平面上,则直线在平面内;反之处于平行状态
- 直线与平面相交时:
\[\vec{n_A} \cdot \vec{P_AP_i} = 0 \rArr \vec{n_A} \vec{w} + s_i \vec{n_A} \vec{u} = 0 \rArr s_i = -\frac{\vec{n_A} \vec{w}}{\vec{n_A} \vec{u}} = \frac{\vec{n_A}\cdot (P_A - P_s)}{\vec{n_A} \cdot (P_e - P_s)} \]
- 直线的定义:
代码实现: 🌻
Eigen::Vector3d LinePlaneIntersection(const Eigen::Vector3d &u, const Eigen::Vector3d &ps, const Eigen::Vector3d &nA, const Eigen::Vector3d &pA)
{
double s = (nA.dot(pA) - nA.dot(ps))/nA.dot(u);
return s * u + ps;
}
测试结果:
1.2.2 矩阵高级用法
二、Eigen C/C++ 数据结构转化
typedef struct{
double x;
double y;
double z;
}T_A391_AXIS_DATA;
Eigen::Vector3f vector_pos;
T_A391_AXIS_DATA t_pos;
// C++ vector模板数据转C语言结构体
t_pos.x = vector_pos[0]
t_pos.y = vector_pos[1]
t_pos.z = vector_pos[2]
// C语言结构体数据转C++ vector模板
vector_pos[0] = t_pos.x
vector_pos[1] = t_pos.y
vector_pos[2] = t_pos.z
Reference
转载请注明出处!感谢GISPALAB实验室的老师和同学们的帮助和支持~

 浙公网安备 33010602011771号
浙公网安备 33010602011771号