移动物体监控系统-sprint2摄像头子系统开发
一、摄像头使能驱动
1.1 摄像头软件系统构架
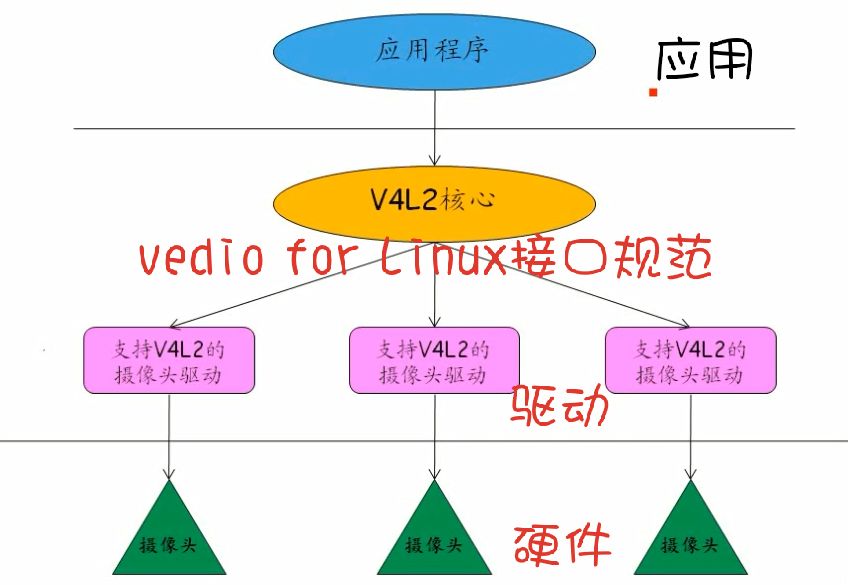
摄像头采集系统按照上图,硬件(摄像头)->摄像头驱动 ->V4L2接口规范 ->图像采集(应用)。V4L2将不同类型的摄像头设备按照统一的接口规范进行图像采集!!!
1.2 摄像头驱动的使能配置
(1)在linux-smart210目录下执行 "make menuconfig ARCH+arm"
(2)依次选择如下配置选项
Device Drivers --->
Multimedia support --->
[*]video for linux --->
[*]video capture adapters --->
[*]V2L usb devices ---> (支持V4L2接口)
<*>GSPCA based webcams --->(万能摄像头驱动)
<*>ZC3XX usb camers Drivers (具体usb摄像头对应的驱动程序)
(3)编译新内核(make uImage ARCH=arm CROSS _COMPILE=arm=linux),内核下载至开发板,摄像头开发环境搭建完成。
(4)摄像头测试程序 camers.c
编译" arm-linux-gcc camera.c -o camera ",将生成的应用程序拷贝到开发板,插入USB摄像头至开发板显示驱动连接信息,执行./camera,即可捕获采集的图像。
二、V4L2编程接口基础设计
part1:V4L2设计构架图
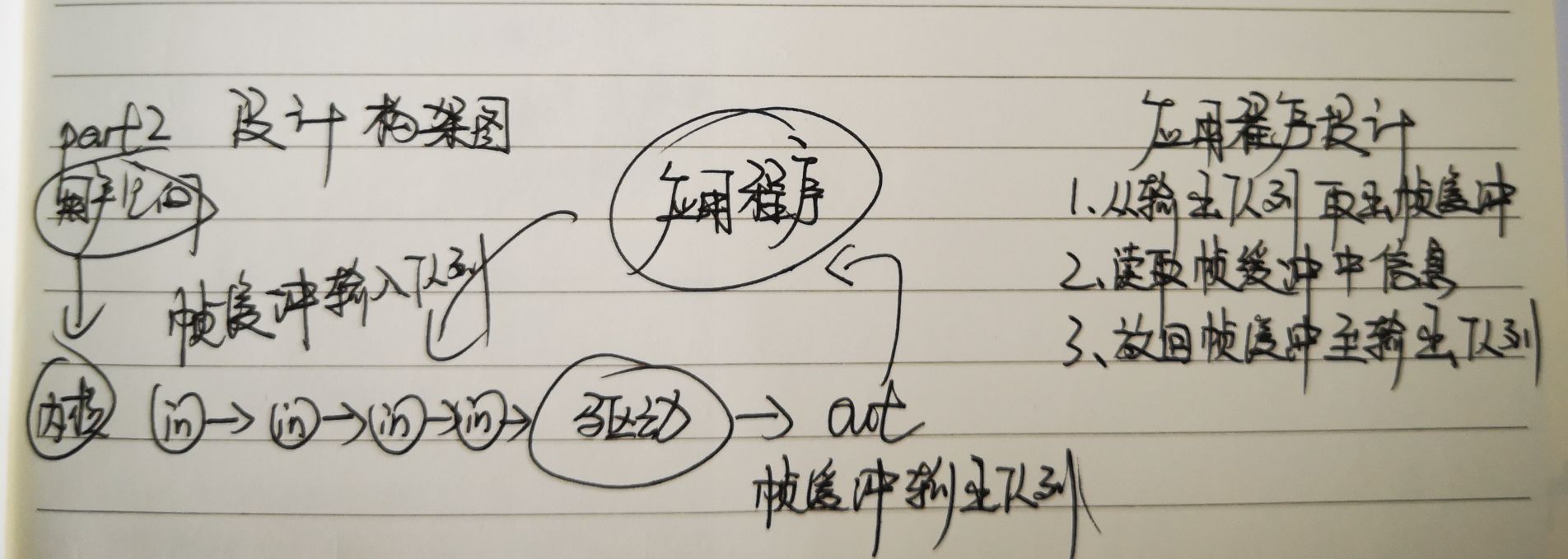
由上图,内核空间中帧缓冲中存储中着摄像头驱动采集的图像信息,用户空间的应用程序需要获取采集到的图像,则需要对帧缓冲进行一下处理:
取出帧缓冲(出队列) ->读取帧缓冲中的数据 -> 放回帧缓冲(入队)
part2:V4L2摄像头编程模型
1、打开摄像头设备文件 ("/dev/video0");
2、获取驱动信息 (ioctl_fd,VIDIOC_QIERYCAP,&cap)
3、设置图像格式 (VIDIOC_S_FMT)
4、申请帧缓冲 (VIDIOC_REQBUFS)
5、获取帧缓冲长度信息 (VIDIOC_QUERYBUF)
6、使用mmap把内核空间的帧缓冲映射到用户空间
7、帧缓冲入队列 (VIDIOC_QBUF)
8、开始采集图像 (VIDIOC_STREAMON)
9、取出帧缓冲(出队)(VIDIOC_DQBUF)
10、访问帧缓冲 (write/read)
11、帧缓冲重新入队 (VIDIOC_QBUF)
part3:V4L2编程
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <assert.h>
#include <getopt.h>
#include <fcntl.h>
#include <unistd.h>
#include <errno.h>
#include <malloc.h>
#include <sys/stat.h>
#include <sys/types.h>
#include <sys/time.h>
#include <sys/mman.h>
#include <sys/ioctl.h>
#include <asm/types.h>
#include <linux/videodev2.h>
struct buffer {
void * start;
size_t length;
};
struct buffer *buffers;
unsigned long n_buffers;
unsigned long file_length;
int file_fd;
char *dev_name = "/dev/video3";
int fd;
static int read_frame (void)
{
struct v4l2_buffer buf;
/*帧出列*/
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE; //V4L2_BUF_TYPE_VIDEO_CAPTURE:1
buf.memory = V4L2_MEMORY_MMAP;
ioctl (fd, VIDIOC_DQBUF, &buf);
write(file_fd,buffers[buf.index].start,buffers[buf.index].length);
/*buf入列*/
ioctl(fd, VIDIOC_QBUF, &buf);
return 1;
}
int main (int argc,char ** argv)
{
struct v4l2_capability cap;
struct v4l2_format fmt;
struct v4l2_requestbuffers req;
struct v4l2_buffer buf;
unsigned int i;
enum v4l2_buf_type type;
file_fd = open("test.jpg", O_RDWR | O_CREAT, 0777);
//1.打开摄像头设备文件
fd = open (dev_name, O_RDWR | O_NONBLOCK, 0);
/*2.获取驱动信息*/
ioctl (fd, VIDIOC_QUERYCAP, &cap);
printf("Driver Name:%s\n Card Name:%s\n Bus info:%s\n\n",cap.driver,cap.card,cap.bus_info);
/*3.设置图像格式*/
fmt.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
fmt.fmt.pix.width = 320;
fmt.fmt.pix.height = 240;
fmt.fmt.pix.field = V4L2_FIELD_INTERLACED;
fmt.fmt.pix.pixelformat = V4L2_PIX_FMT_MJPEG;
ioctl (fd, VIDIOC_S_FMT, &fmt) ;
/*4.申请图像缓冲区*/
req.count = 4;
req.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
req.memory = V4L2_MEMORY_MMAP;
ioctl (fd, VIDIOC_REQBUFS, &req);
buffers = calloc (req.count, sizeof (*buffers));
for (n_buffers = 0; n_buffers < req.count; ++n_buffers)
{
/*4.1获取图像缓冲区的信息*/
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
buf.index = n_buffers;
ioctl (fd, VIDIOC_QUERYBUF, &buf);
buffers[n_buffers].length = buf.length;
// 4.2把内核空间中的图像缓冲区映射到用户空间
buffers[n_buffers].start = mmap (NULL , //通过mmap建立映射关系
buf.length,
PROT_READ | PROT_WRITE ,
MAP_SHARED ,
fd,
buf.m.offset);
}
/*4.3图像缓冲入队*/
for (i = 0; i < n_buffers; ++i)
{
buf.type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
buf.memory = V4L2_MEMORY_MMAP;
buf.index = i;
ioctl (fd, VIDIOC_QBUF, &buf);
}
//4.4开始捕捉图像数据
type = V4L2_BUF_TYPE_VIDEO_CAPTURE;
ioctl (fd, VIDIOC_STREAMON, &type);
fd_set fds;
FD_ZERO (&fds);
FD_SET (fd, &fds);
select(fd + 1, &fds, NULL, NULL, NULL);
/*4.5读取一幅图像*/
read_frame();
for (i = 0; i < n_buffers; ++i)
munmap (buffers[i].start, buffers[i].length);
close (fd);
close (file_fd);
printf("Camera Done.\n");
return 0;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号