Ubuntu 18.04LTS安装ROS&获取IWR6843AOP点云数据
Windows PC 应具有超过 12GB 的可用硬盘空间,用于在 VM 上安装 VM 和所有必需的软件
1. 安装虚拟机
- 安装Oracle Virtualbox(https://www.virtualbox.org/)
- 下载系统镜像Ubuntu18.04LTS(https://releases.ubuntu.com/18.04/),选择64-bit PC (AMD64) desktop image
- 打开Oracle Virtualbox,点击 新建,填写相关信息,安装路径,路径都不要有中文,ISO image选择下载好的系统镜像,选择 RAM 内存大小至少为 2048 MB
-安装完后界面显示会很小,点击 设备 - 安装增强功能 后,再点击 视图 - 自动调整显示尺寸 可以调整大小 - 安装完成
2.安装ROS
- 设置你的sources.list,设置您的计算机接受packages.ros.org的软件
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'
此处设置的是清华下载源[1],速度应该比原下载源快的多 - 设置你的keys
sudo apt install curl # if you haven't already installed curl curl -s https://raw.githubusercontent.com/ros/rosdistro/master/ros.asc | sudo apt-key add - - 安装
首先,确保你的Linux包索引是最新的:
sudo apt update
然后安装完整版ROS[2]:
sudo apt install ros-melodic-desktop-full - 安装完成,可以查看一下可用的软件包,请使用:
apt search ros-melodic - 环境设置
如果ROS环境变量在每次启动新shell时自动添加到你的bash会话中,这是很方便的:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
- 构建包的依赖关系,到目前为止,您已经安装了运行核心ROS包所需的东西。要创建和管理您自己的ROS工作空间,有各种单独分发的工具和需求。例如,rosinstall是一个经常使用的命令行工具,它允许您使用一个命令轻松下载ROS包的许多源代码树。
要安装此工具和构建ROS包的其他依赖项,请运行:
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
- 初始化rosdep,在使用许多ROS工具之前,需要初始化rosdep。rosdep使您能够轻松地为要编译的源代码安装系统依赖项,并且需要在ROS中运行一些核心组件。如果您还没有安装rosdep,请按照以下步骤进行安装。
sudo apt install python-rosdep
使用以下命令,可以初始化rosdep。
sudo rosdep init
rosdep update - 验证ROS安装完成
- ROS系统的启动需要一个ROS Master,即节点管理器,我们可以在终端输入roscore指令来启动ROS Master
roscore
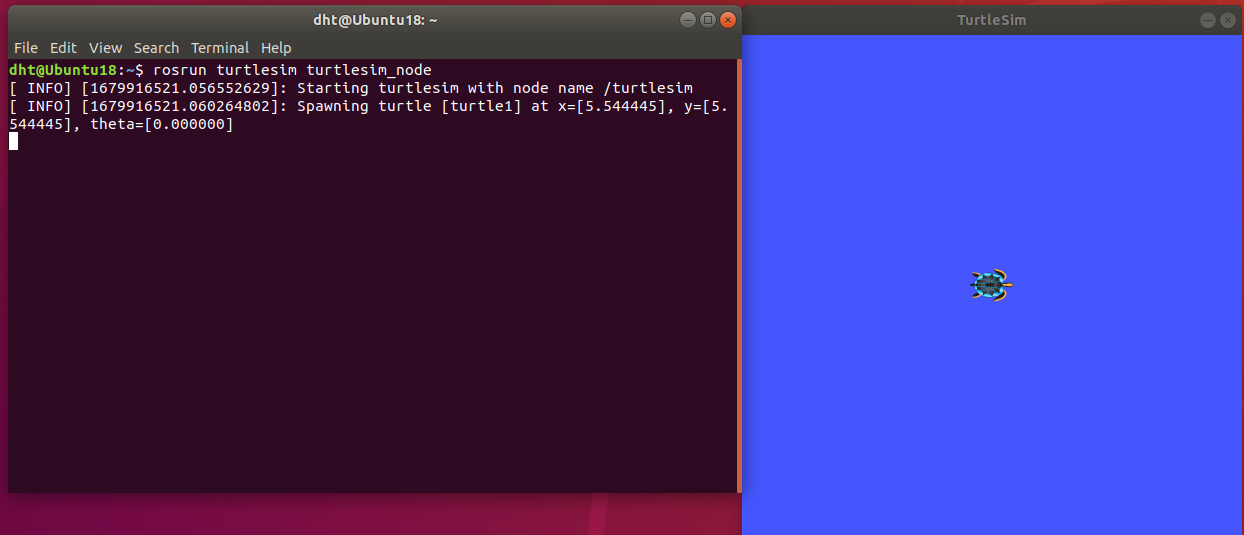
- 然后我们来启动一个小海龟的例程。再新打开一个终端,输入
rosrun turtlesim turtlesim_node
- 我们再打开一个终端,输入
rosrun turtlesim turtle_teleop_key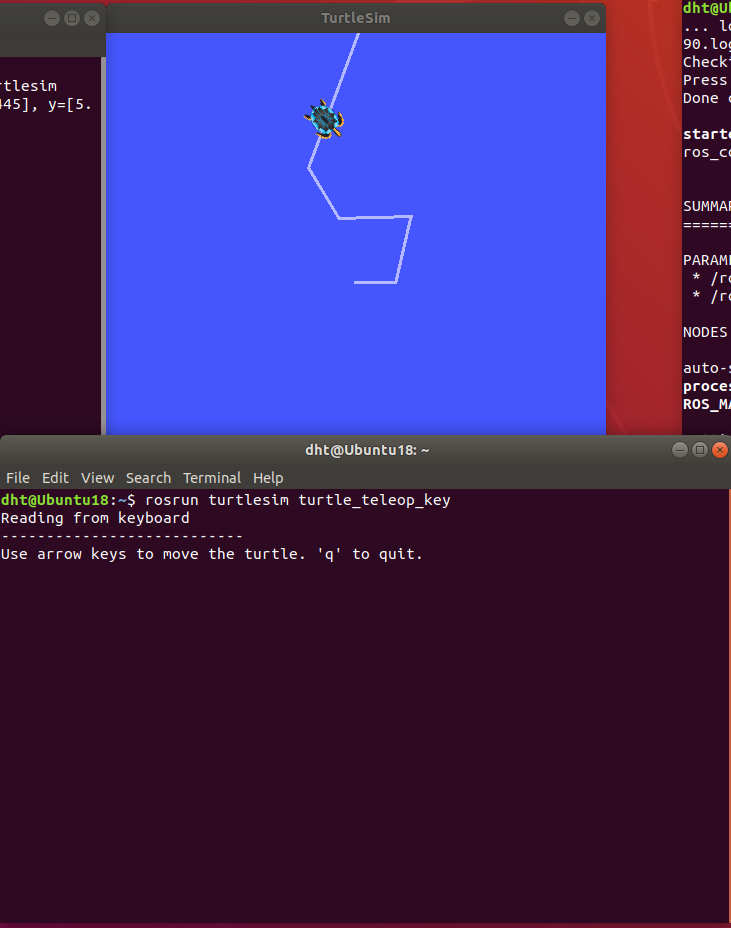
来启动键盘控制,通 过↑、↓、←、→来控制小乌龟的移动。 - 验证成功
- ROS系统的启动需要一个ROS Master,即节点管理器,我们可以在终端输入roscore指令来启动ROS Master
3.ROS使用
用户权限
我们在使用ros driver这个demo时需要控制电脑的两个端口,分别用来发送命令和传输数据。这需要我们的用户在dialout这个组中,首先使用:groups,此时当前用户并不处于dialout用户组,使用sudo adduser <your name> dialout,添加进入用户组,重启虚拟机更新权限
构建 TI 毫米波 ROS 驱动程序
- 所有 ROS 实验室的软件包都保存在 git.ti.com 上,不再通过工具箱托管。要下载软件包,请首先确保计算机上安装了 git
sudo apt-get install git - 接下来,从 git.ti.com 克隆 git 存储库
git clone https://git.ti.com/git/mmwave_radar/mmwave_ti_ros.git - 将目录切换到 ROS 驱动程序实验室(下载的文件夹内),这是工作区目录。
cd mmwave_ti_ros/ros_driver/ - 构建实验室
catkin_make - 设置源 setup.bash 文件(设置工作区)
source devel/setup.bash
运行驱动程序
- 你需要使虚拟机能够访问毫米波 EVM 串行端口,方法是转到虚拟机窗口顶部的设备菜单,转到设备 - USB 并选择传感器的串口 选项
- 您可以使用以下命令检查毫米波 EVM 是否已连接以及两个 COM 端口是否显示
ll /dev/serial/by-id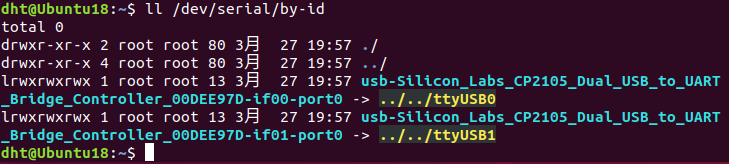
- 打开文件并编辑以下行以使用您自己的串行端口而不是默认端口
vi <$WORKSPACE>/src/ti_mmwave_rospkg/launch/ti_mmwave_sensor.launch
<$WORKSPACE>是指git下载下来的文件路径,例如我的全部路径是
/mmwave_ti_ros/ros_driver/src/ti_mmwave_rospkg/launch
可以选择先从可视化界面进入文件夹,再右键在当前文件夹开启终端vi 6843AOP_multi_3d_0.launch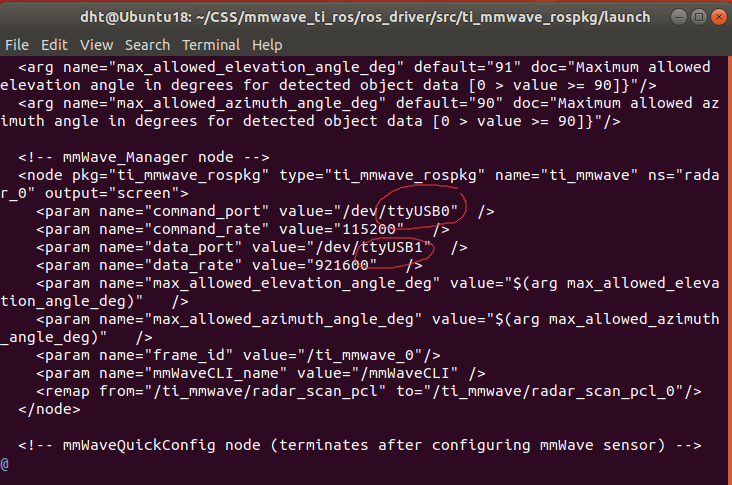
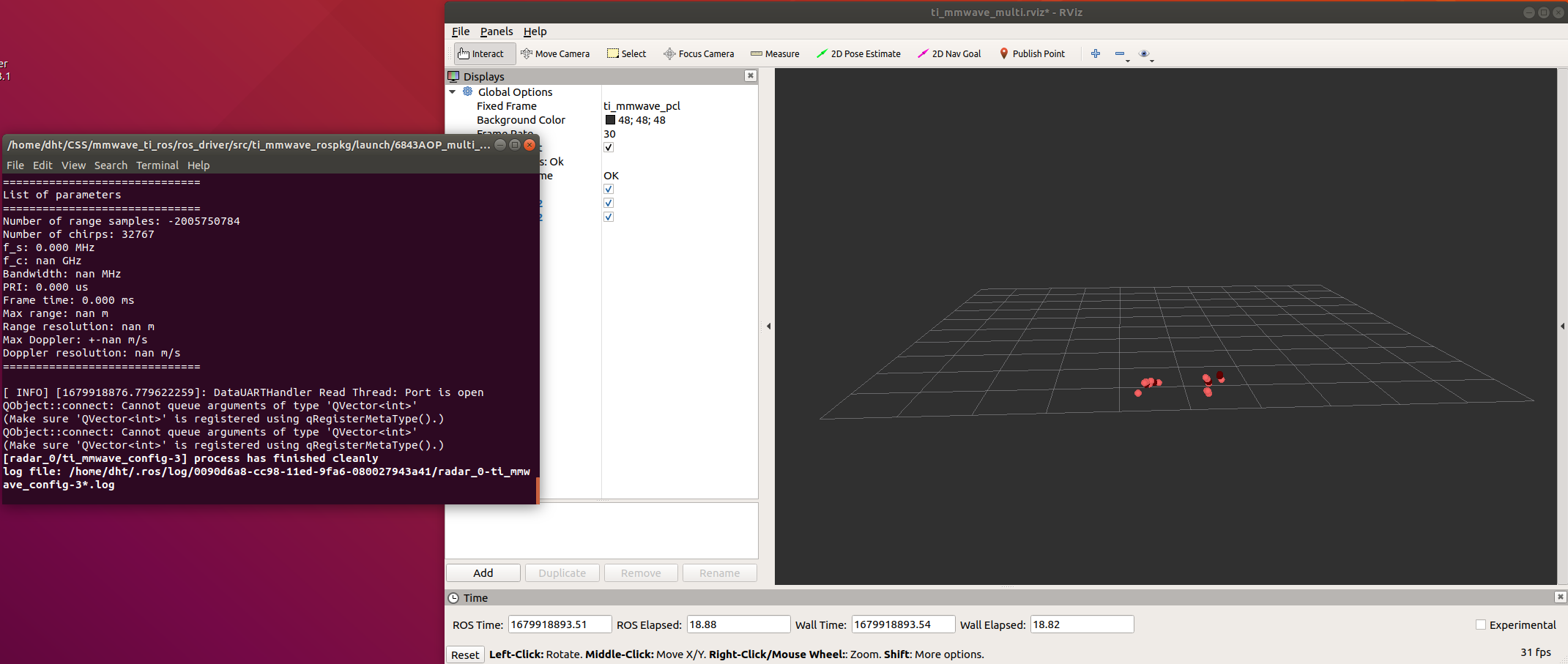
- 启动 TI 毫米波 ROS 节点和 Rviz 可视化工具
roslaunch ti_mmwave_rospkg 6843AOP_multi_3d_0.launch
记录点云数据
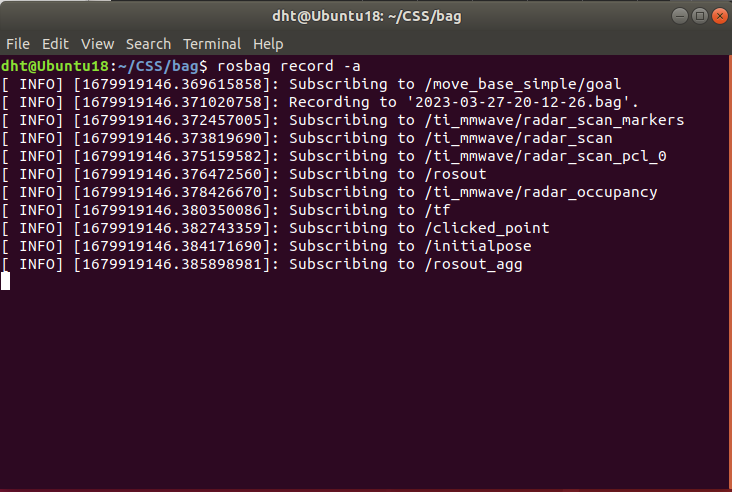
- 启动以后,找到一个存放点云文件的地方,新建一个终端,输入
rosbag record -a开始记录bag类型点云数据,终端界面会显示可以订阅的topic名称
- 我们需要/ti_mmwave/radar_scan的数据,则将刚生成的bag文件提取topicname为/ti_mmwave/radar_scan的txt文件
rostopic echo -b <file_name.bag> -p /ti_mmwave/radar_scan > <txt_name.txt>
毫米波雷达数据分析
这是一个雷达检测到的点的数据记录。以下是每个字段的含义:
- seq: 序列号,用于标识此数据点是该雷达发送的第几个数据包。
- stamp: 时间戳,记录此数据点的接收时间,包括秒数和纳秒数。
- frame_id: 多传感器场景下使用的帧ID。
- point_id: 数据点的ID,用于标识每个帧中的检测点(每个帧从0开始)。
- x、y、z: 数据点的位置坐标,分别表示点相对于雷达的前、左/右和上/下方向的距离。
- range: 雷达测量的距离,以米为单位。
- velocity: 雷达测量的速度,以米/秒为单位。
- doppler_bin: 数据点的多普勒频率位置,总数等于每个脉冲中的扫描数。
- bearing: 雷达测量的角度,以度为单位,右侧为正方向。
- intensity: 雷达测量的信号强度,以分贝为单位。
参考链接:
【Linux Host Support CCSv8】
【TI mmWave ROS Driver Users Guide】
【Ubuntu install of ROS Melodic】

 浙公网安备 33010602011771号
浙公网安备 33010602011771号