Robust RFID-Based Respiration Monitoring in Dynamic Environments
基于RFID的呼吸监测在动态环境中的鲁棒性研究
- https://ieeexplore.ieee.org/document/9521823
- IEEE Transactions on Mobile Computing ( Volume: 22, Issue: 3, 01 March 2023)
摘要
呼吸监测(RM)是跟踪各种健康问题的关键。近年来,射频识别技术被广泛应用于轻量化和低成本的材料回收。然而,现有的基于RFID的RM系统是为静态环境设计的,没有人在被监视的人周围移动。而在实践中,大多数环境都是动态的,人们在附近移动,这就引入了动态多径信号,严重扭曲了呼吸信号,导致RM不准确。本文的目标是在动态环境中实现精确的基于RFID的RM。我们的观察表明,多径信号可以导致类似于呼吸的模式,从而导致呼吸暂停的错误检测和不准确的呼吸速率估计。为了解决这个问题,我们首先在信号谱图中测量呼吸异常来检测呼吸暂停。其次,根据人体呼吸特性,成功地消除了呼吸速率估计的多径效应。具体来说,与人的移动方式相比,呼吸方式具有规律性和周期性。通过将正常的呼吸周期转换为匹配滤波器,可以从噪声RFID信号中提取真实的呼吸周期,并利用峰值检测方法估计呼吸速率。实验表明,该系统在动态环境下的呼吸速率检测和呼吸速率估计的平均误差分别为4.2%和0.51bpm。>。为了解决这个问题,我们首先在信号谱图中测量呼吸异常来检测呼吸暂停。其次,根据人体呼吸特性,成功地消除了呼吸速率估计的多径效应。具体来说,与人的移动方式相比,呼吸方式具有规律性和周期性。通过将正常的呼吸周期转换为匹配滤波器,可以从噪声RFID信号中提取真实的呼吸周期,并利用峰值检测方法估计呼吸速率。实验表明,该系统在动态环境下的呼吸速率检测和呼吸速率估计的平均误差分别为4.2%和0.51bpm。
主要贡献
- 他们是第一个在动态环境中实现RFID-based RM的研究团队,他们克服了移动人员对信号的干扰,提高了系统的鲁棒性!
- 他们提出了一种基于卡尔曼滤波和自适应阈值的算法,可以实时地估计呼吸频率和深度,且具有较高的准确性
- 他们在不同场景下进行了大量的实验,验证了他们的算法和系统的有效性和可行性
基于RFID的呼吸监测与多路径效应
呼吸信号的相位
当RFID阅读器接收到标签背散射信号时,将其转换为基带信号\(\vec{V}\),可以表示为
\(\vec{V}_{leak}\) 泄露信号
\(\vec{V}_{scatter}\) 散射信号
\(\vec{V}_{t}^{i}\) 反向散射信号
第二,信号相位也可以表示为信号传播距离\(d\)的函数,如下所示。
\(\lambda\) 信号波长
在呼吸过程中,将射频识别标签贴在胸部,并直接面对天线。上式变成
\(d_{0}\) 标签到天线的初始距离
\(d_{r}(t)\) 一个描述胸部运动的正弦函数,当胸部周期性地向前和向后移动时,信号相位呈现出相应的周期规律,谷和峰分别表示胸部的扩张和收缩
2.2 多径信号相位
标签和天线之间的LOS信号用于提取呼吸模式
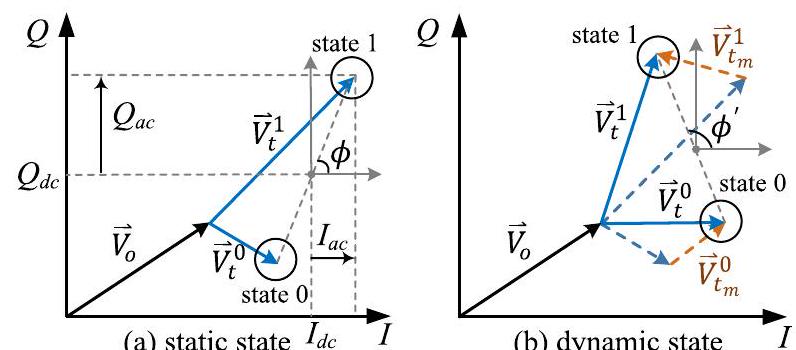
当周围的人在标签附近移动时,将多径信号的电压加到接收到的信号上,标签信号的相位\(\phi\)表示为
\(\vec{V}_{t_{s}}^{1,0}\) 静态分量的电压
\(\vec{V}_{t_{m}}^{1,0}\) 动态多径信号的电压
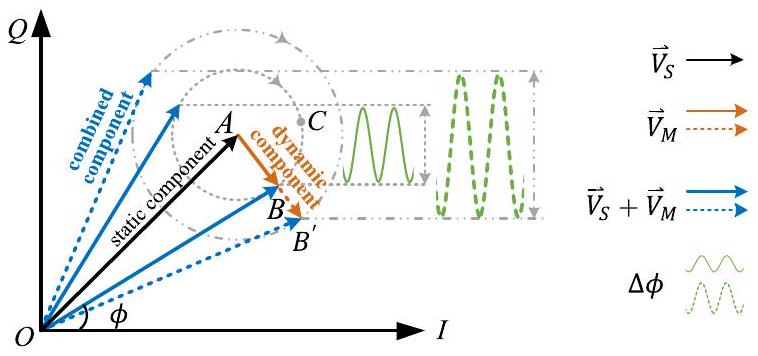
\(\vec{OA}\)表示静态分量的和,即等式中的\(\vec{V}_{S}\)。当人们移动标签时,动态组件\(\vec{V}_{M}\),即下图中的\(\vec{AB}\),将从0旋转到\(2\pi\)。被测相位用组合分量\(\vec{OB}\)表示。因此,组合相位受到\(\left|\vec{V}_{M}\right|\)和\(\angle \vec{V}_{M}\) (\(\vec{V}_{M}\)与\(I\)轴的夹角)的共同影响。当人们在标签附近移动时,\(\left|\vec{V}_{M}\right|\)的强度(长度)发生变化,例如,\(\left|\vec{V}_{M}\right|\)从\(\vec{A B}\)增加到 \(\vec{AB}^{\prime}\)。同时,\(\angle \vec{V}_{M}\)也可能发生变化,当\(\vec{A B}\)旋转到\(\vec{A C}\)时,\(\angle \vec{V}_{M}\)减小。合并后的信号相位也随之改变。因此,在接下来的章节中,我们将从\(\left|\vec{V}_{M}\right|\)和\(\angle \vec{V}_{M}\)的角度来研究周围人的运动对信号相位的影响
2.2.1 \(\left|\vec{V}_{M}\right|\)的影响
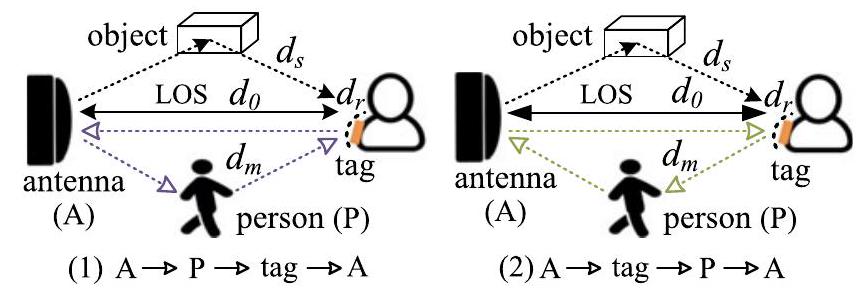
多径信号主要以两种方式传播:(1)天线\(\rightarrow\)人\(\rightarrow\)标签\(\rightarrow\)天线;(2)天线\(\rightarrow\)标签\(\rightarrow\)人\(\rightarrow\)天线
-
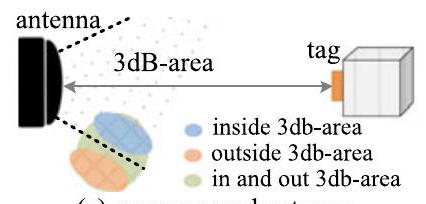
在第一种情况里,多径信号的强度主要由移动的人从天线到标签的反射所决定,结果表明,人在天线周围的移动范围是影响\(\left|\vec{V}_{M}\right|\)的关键因素。
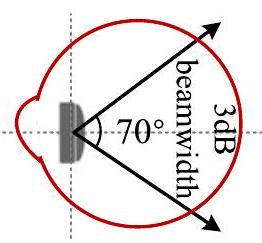
RFID天线通常是定向的,并且有一个有效的辐射区域,其中有一个\(3db\)波束宽度的区域(表示为\(3 db-area\))。图a为Laird天线的3db区域。红色圆圈内的区域为有效辐射范围,两个黑色箭头分割的内区域为3db区域。当人在\(3db\)区域内移动时,更多的多路信号被人反射,信号幅度更大,反之亦然。
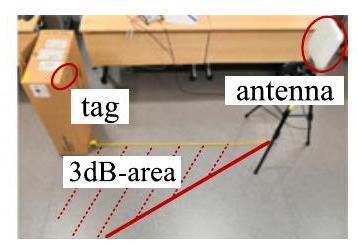
在地面上画一条红线作为3分贝波束宽度的边界。要求志愿者在不阻塞LOS路径的情况下,在三维区域内、外、随机进出
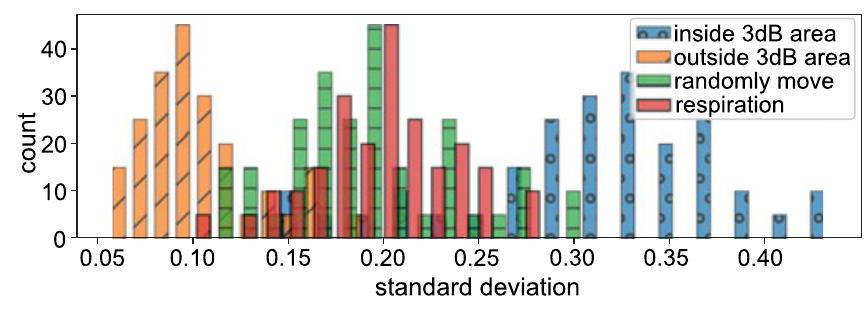
信号相位的标准差(\(std\)),其可以用作测量信号变化的良好指示符,由下图可以看出:
- 人们在\(3db\)区域内移动时,信号相位的\(std\)一般大于\(3db\)区域外移动时的\(std\)。这是因为在\(3db\)区域内的移动会导致更大的\(\left|\vec{V}_{M}\right|\)。
- 随机运动和呼吸活动的\(std\)分布相互重叠,表明运动人群的多径信号对相位变化的影响与呼吸活动相似。因此,周围人的运动可以带来与呼吸活动相当的相位变化
-
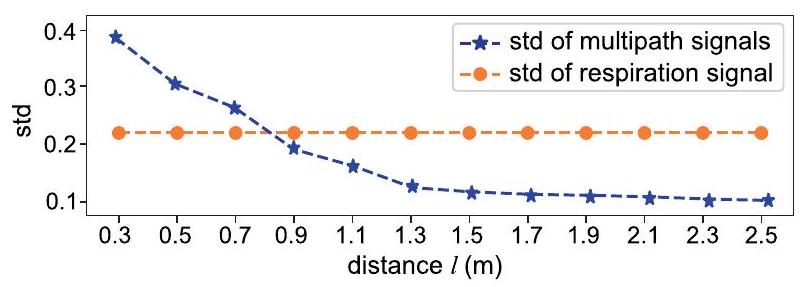
在第二种情况里,多径信号的强度主要取决于移动的人从标签到天线的反射,让一名志愿者沿着标签附近的一条直线走,到LOS线的距离不同
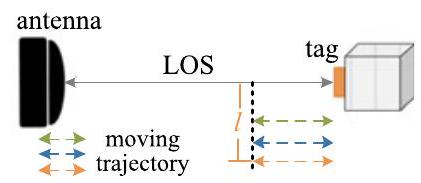
下图给出了不同 \(l\)时信号相位的平均 \(std\)。\(std\) 随 \(l\) 的增大先急剧下降后平稳下降,从而限制了移动者远离被监控者时多径信号的影响。然而,如果患者靠近被监护者,多路信号可能会影响呼吸模式,应小心去除
2.2.2 \(\angle \vec{V}_{M}\)的影响
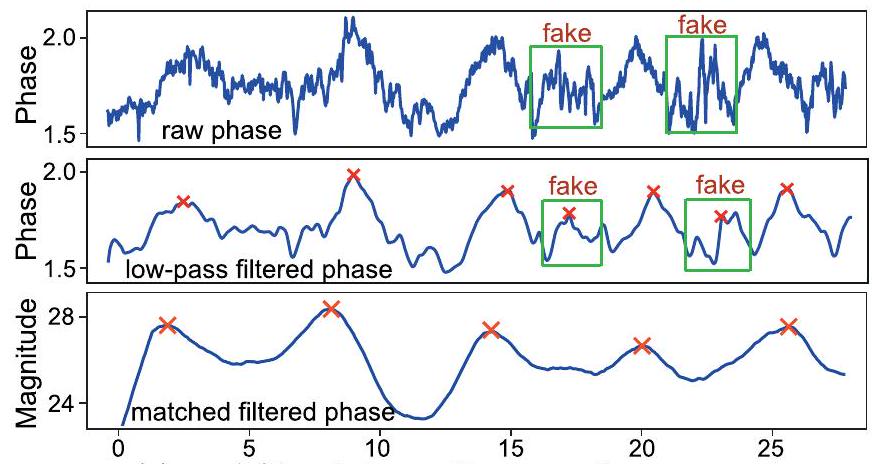
为了展示周围人的躯干和四肢运动的效果,我们把标签固定在一个固定的盒子上,让一个人从天线走向标签,然后停一段时间,最后后退。测量的信号相位如图所示。总体的增加和减少趋势(用黄色虚线箭头突出显示)主要是由躯干从天线移动到标签侧引起的。同时,绿色矩形中的小峰是由于行走过程中肢体的周期性运动。高频肢体运动的影响可以通过低通滤波器去除。但图中总体的增减趋势可能被误检为假呼吸周期,应从信号相位中剔除。
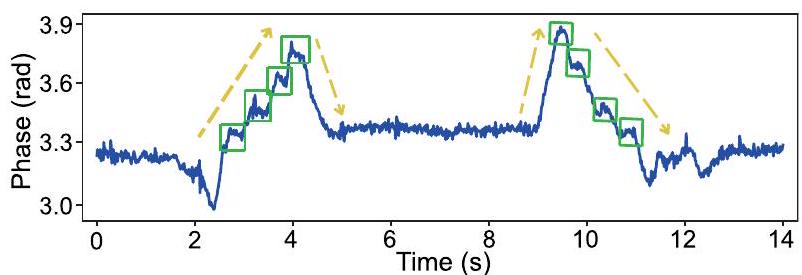
综上所示,基于\(\left|\vec{V}_{M}\right|\)和\(\angle \vec{V}_{M}\)分析,运动人群的多径信号会对呼吸信号产生扭曲,信号相位变化幅度相当,其中既有高频噪声,也有假呼吸周期。
2.3 混合多径信号的呼吸信号
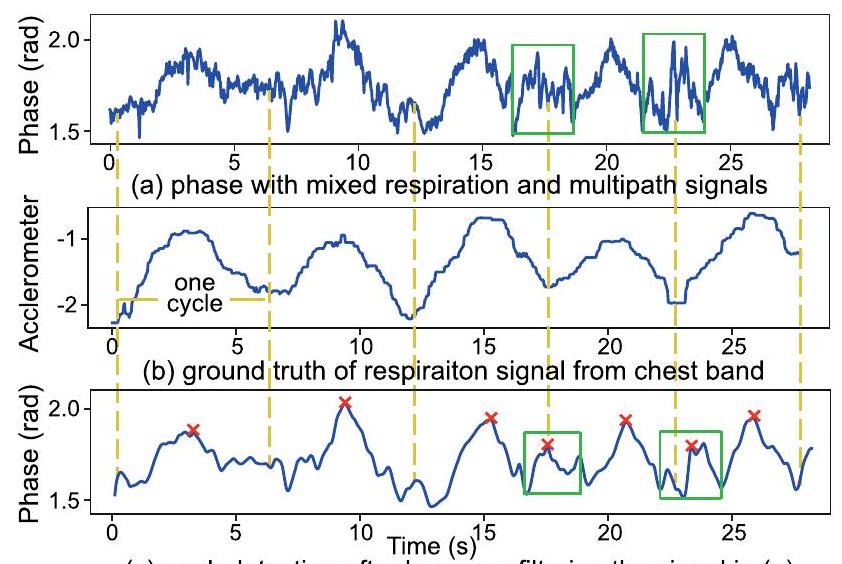
为了研究多径信号对呼吸信号的影响,我们在一个人的胸部贴上RFID标签,并让另外两个人在附近行走。图a示出了与呼吸和多径信号混合的接收信号相位。呼吸的基础真实信号用胸带收集,如图b所示。要求被监测者正常呼吸5个呼吸周期。在图a中,呼吸周期被多径信号引起的噪声扰乱。特别地,绿色矩形中的噪声表现出与真实的呼吸峰值相似的幅度。如果在图a上应用低通滤波器,随后应用峰值检测方案,如图c所示,将检测到7个呼吸循环,并且额外的2个假呼吸循环可能导致不准确的呼吸速率估计。此外,多径信号会导致错误的呼吸暂停检测。如果人们在患有呼吸暂停综合症的被监测者周围移动,则多径信号将引起与呼吸类似的模式,这可能误导被监测者仍在呼吸。
3 RM-Dynamic
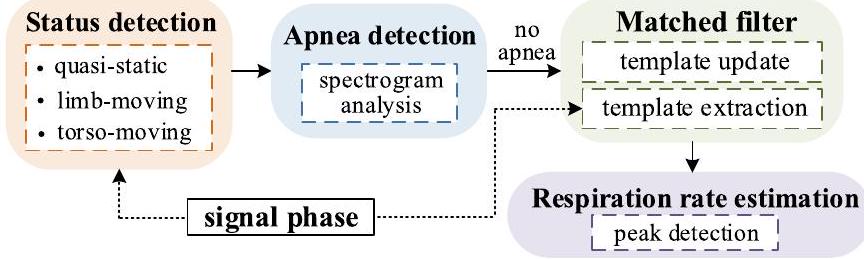
RM-Dynamic系统的概述如图所示。原始信号阶段首先从被监控者胸部的标签收集,并分割成固定长度的窗口。接下来,进行状态检测,检测被监控者是准静态的,还是有小尺度的肢体运动,还是有大尺度的躯干运动。RM是在没有检测到大规模的躯干运动时进行的。然后将信号相位转换成频谱图,在频域上检测呼吸暂停的异常模式。如果没有检测到呼吸暂停信号,则在信号相位上应用匹配滤波器对呼吸信号与多径信号混合进行去噪。匹配的过滤器是使用我们的模板提取方法生成的呼吸循环模板创建的。由于不同的人有不同的呼吸模式,我们预先收集被监测人在静态环境中呼吸时的信号相位,以提取一个独特的模板。此外,我们提出了一种模板更新方法,以适应被测者呼吸模式随时间的变化。最后,对滤波后的信号相位进行处理,通过检测重复峰值估计呼吸速率。
3.1 状态检测
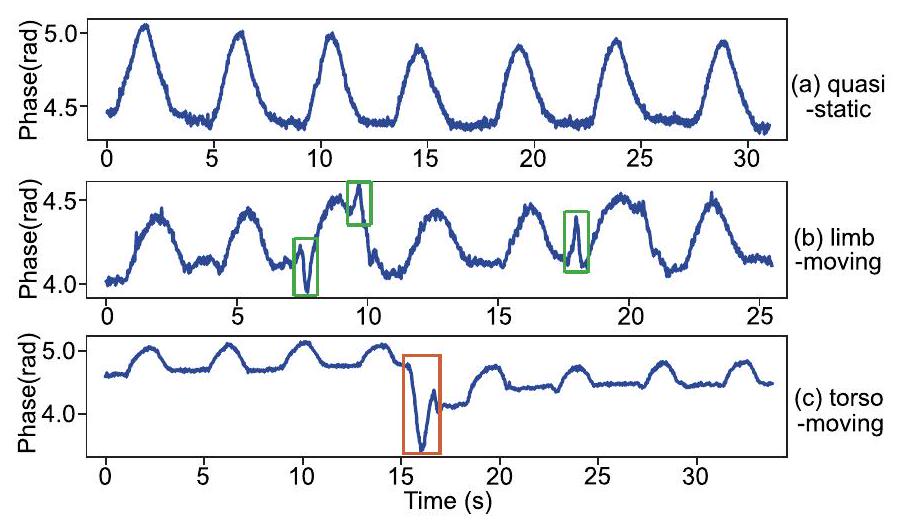
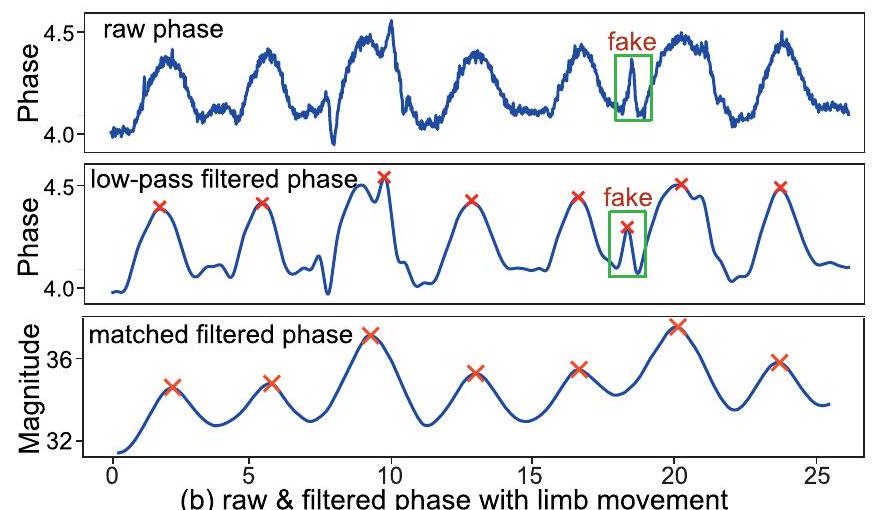
为了检测不同的运动状态,我们观察被监测人在上述三种状态下呼吸时的信号相位,如图所示。在准静态状态下,呼吸信号具有明显的周期规律。对于肢体运动状态,肢体运动在呼吸信号中引起小抖动,如图b中绿色矩形所示。然而,这些抖动对呼吸信号的影响有限,可以使用我们设计的匹配滤波器来消除。当被监控者整个躯干移动时,信号相位出现更剧烈的波动,如图c中红色矩形所示。这是因为人体的躯干可能会阻塞在胸部标签和天线之间的LOS路径。基于这些观察,我们的RM- dynamic系统应该自动检测运动状态,当人处于准静态和肢体运动状态时执行RM,当检测到较大的躯干运动时停止RM
为了检测躯体运动状态,我们在一个窗口内比较相位变化的幅度,这个幅度计算为最大和最小相位之间的差值。如果\(\phi_{\text {diff }}\)大于预定义的阈值,则认为该窗口处于躯体移动状态,反之亦然。
3.2 呼吸暂停检测
来自移动人群的多路径信号可能会导致假呼吸周期,从而导致呼吸暂停的错误检测,如图所示
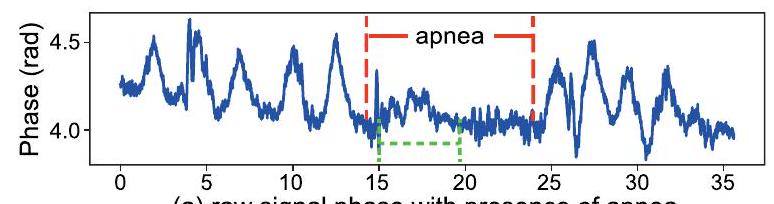
为了区分呼吸暂停与多径信号,我们采用了信号相位的时频模式。具体来说,我们提取了信号相位的频谱图,从中我们可以识别呼吸暂停呼吸信号中的异常。例如,提取图a中信号相位的谱图,如图c所示。在信号谱图中,中间有一个白色区域,与呼吸暂停周期完全吻合,同时清晰地显示了正常呼吸时的主导频率,在\(0.3-0.4 \mathrm{~Hz}\)左右,与呼吸频率相对应。这表明真实呼吸信号的频率成分虽然与多径信号混合,但在呼吸频率范围\(0.17-0.5 \mathrm{~Hz}\)上仍然占主导地位。相反,如果人停止呼吸,只留下多径信号,频率成分在呼吸频率范围内几乎消失。
基于这一观察结果,我们利用呼吸频率范围内主导频率的消失来检测呼吸暂停。我们定义一个呼吸优势指数(RDI)来检测主导频率是否在呼吸频率范围内消失。为了测量RDI,我们首先对信号相位进行短时傅里叶变换(STFT),得到频谱图。在短时傅立叶变换中,首先将信号相位分割成固定长度的段对于每个时间段,我们测量谱图中所有频域振幅的平均值作为噪声阈值。然后,通过计算呼吸频率范围内振幅超过噪声阈值的频率个数来计算RDI。
3.3 匹配滤波器
3.3.1 模板提取
为了提取呼吸循环模板,我们首先在静态环境下预采集被测者的纯呼吸信号相位。被监测人正常呼吸12分钟,在此期间采集信号相位。不在于模板收集是一次性的步骤,不会给用户带来太多的不便。然后,我们采用如下的循环平均方法从纯呼吸信号中提取模板。首先,用中值滤波器平滑呼吸信号相位。然后,检测局部最小值,即呼吸周期的起始点,将信号相位分割为多个周期。为了检测局部最小值,对信号相位的负相位进行峰值检测。接下来,对于每个呼吸循环,我们使用欧几里德距离计算它与所有其他呼吸循环的相似度。以相似度最高的呼吸循环作为模板候选。最后,根据所有呼吸循环的平均宽度和高度对候选模板进行缩放,作为呼吸循环模板\(r_{t}(n)\)。
3.3.2 模板更新
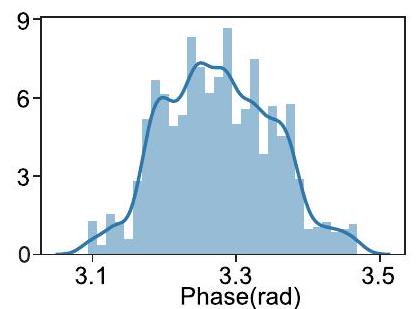
我们提出了一种在RM过程中更新模板的方法。考虑到呼吸模式在短时间内保持稳定的可能性较大,我们首先设定了一个更新模板的周期,如\(3 min\)。然后,对于每个更新周期,在信号相位的某个只受呼吸活动的影响,不受多径信号干扰的时间窗口内,对模板进行更新。为了实现这一点,我们利用了纯呼吸信号和混合了多径信号的呼吸信号之间的相位分布差异。纯呼吸信号为正弦波,呈非高斯分布,如图a所示。

而由于多径信号产生的随机噪声,多径混合呼吸信号的分布更可能是高斯分布,如图b所示。
基于这些观测结果,我们计算了相位分布与高斯分布之间的距离。采用土动距离(EMD)来测量分布距离。EMD越小,相似度越大。将比较高斯分布的均值和标准差设为所测信号相位的均值和标准差。我们分别为在静态环境下正常呼吸的被测者和在附近移动的被测者采集了40个相迹。其对应高斯分布的EMD结果如图所示。
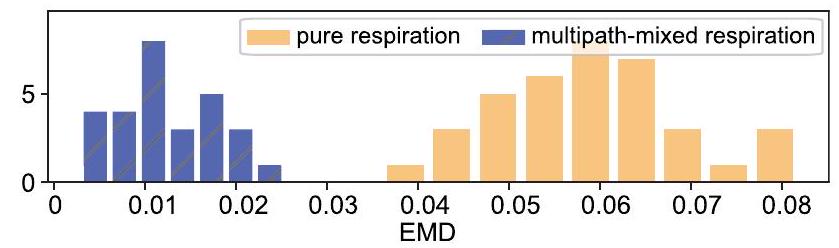
对于纯呼吸信号,距离远大于多径混合呼吸信号。因此,我们选择所有窗口中EMD最大的相位窗口,使其主要涉及到纯呼吸信号。然后,在选中的窗口上应用循环平均方法来更新模板\(r_{t}(n)\)。
3.3.3 创建匹配滤波器
利用所提取的模板\(r_{t}(n)\),获得匹配滤波器的冲激响应\(h(k)\)为\(h(k)=r_{t}(N-k-1)\),其中\(N\)是\(r_{t}(n)\)的长度。在图18中,我们示出了在对上图中的原始信号相位应用匹配滤波器之后的输出信号相位。分别为a和b。在图18a的第一幅图中,来自周围运动的多径信号在原始信号阶段中带来假呼吸周期。当使用低通滤波器时,这些伪循环仍然保留在信号相位中。相比之下,应用匹配滤波器可以去除假循环,同时精确地检测真实的循环,其与之前图中的真实呼吸匹配。类似地,通过应用匹配滤波器,成功地去除了图b中由肢体运动引起的假呼吸峰值,然而,这不能由低通滤波器实现
3.4 呼吸速率估计
然而,在RM场景中,信号相位的大小将随时间而改变。固定阈值可能不合适,可能导致丢失或错误的峰值。因此,为了自动适应不同尺度,我们采用了自动多尺度峰值检测( AMPD )算法。AMPD 使我们不用选择固定的阈值,借助多尺度技术来检测真实的峰值。上图图中应用 AMPD 后检测到的信号峰值用红色叉表示。然后,呼吸速率估计如下
\(p_{i}\) 检测到峰值的时间
\(n\) 总峰值数
4 实验评估
4.1 评价指标
首先,对于呼吸暂停的检测,缺失呼吸暂停(MA)和假呼吸暂停(FA)在所有呼吸暂停病例中所占的百分比定义如下
其次,为了评估呼吸速率估计的准确性,我们使用平均绝对误差(MAE)如下所示。
\(r_{i}\) 估计的呼吸速率
\(r_{i}^{\prime}\) 实际的呼吸速率
4.2 评估结果
4.2.1 状态检测的表现
准静态和肢体运动状态和躯干运动状态的检测精度均超过95%。
4.2.2 RDI在呼吸暂停检测中的作用
我们的方法优于固定峰值阈值方法,MA和FA约减少10%
4.2.3 匹配滤波器在呼吸速率估计中的作用
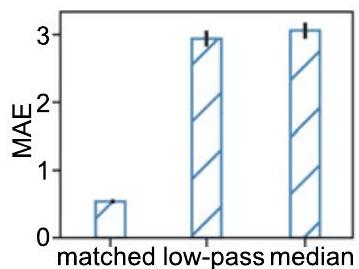
为了证明匹配滤波器在呼吸速率估计上的有效性,我们首先比较在信号相位上应用匹配滤波器和不应用匹配滤波器时真实和估计的呼吸速率之间的MAE。对于没有匹配滤波器的方法,我们采用低通滤波器和中值滤波器对信号相位进行去噪。然后,应用AMPD计数呼吸周期。如图a所示,使用匹配滤波器的平均MAE为0.51 bpm。而使用low-pass和中值滤波器的MAEs分别为2.94 bpm和3.08 bpm,比使用匹配滤波器的MAE大5倍。这说明匹配的滤波器有助于提高呼吸速率估计的准确性。
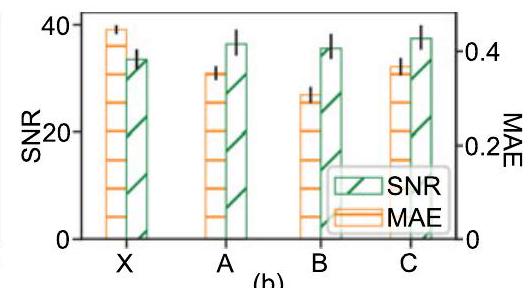
接着,我们借由两个实验来探讨样板撷取与更新方法的有效性。第一个实验是为了说明不同的人的模板如何影响RM绩效。我们选择一个志愿者\((X)\),并从X在静态环境中的呼吸信号相位提取模板。然后,\(X\)的模板被用于创建匹配滤波器,以在人围绕\(X\)移动时对呼吸信号相位进行去噪。然后,我们从三个志愿者(\(A\)、\(B\)和\(C\))中提取另外三个模板,并分别创建三个匹配过滤器。最后,利用三个匹配滤波器对\(X\)的呼吸信号相位进行去噪。图b示出了使用从不同人的模板创建的匹配过滤器的MAE。除了MAE之外,SNR也被报告为显示匹配滤波器对信号去噪的能力。当使用从X自己的模板创建的匹配滤波器时的SNR高于使用其他人的模板。同时,使用X自己的模板也获得了最低的MAE,说明了为每个用户提取个性化模板的重要性和我们的模板提取方法的有效性。
4.2.4 移动人群数量对呼吸暂停检测和呼吸速率估计的影响
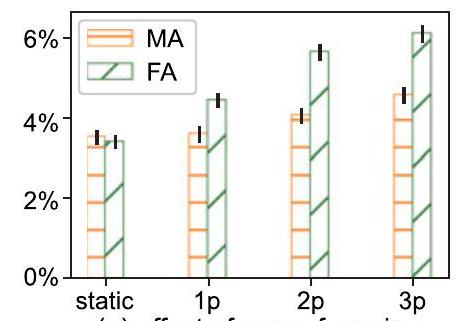
在这个评估中,我们评估了系统在静态和动态环境下的性能,包括不同数量的移动人员,即0(静态),1 (1p), 2 (2p)和3 (3p)人的移动。人与天线之间的距离设为1.5米。首先,我们评估呼吸暂停检测的性能。志愿者作为被监控者,被要求屏住呼吸5 - 10秒来模拟呼吸暂停。MA和FA的结果如图a所示。总体上,MA和FA随流动人口数量的增加而略有增长,但均在6%以下。移动1-3人的平均MA和FA仅比静态环境高2-3%。这表明我们的方法可以提高动态环境中多人呼吸暂停检测的鲁棒性。
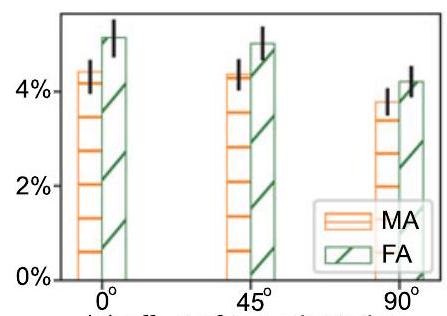
4.2.5 周围人群移动区域对呼吸暂停检测和呼吸速率估计的影响
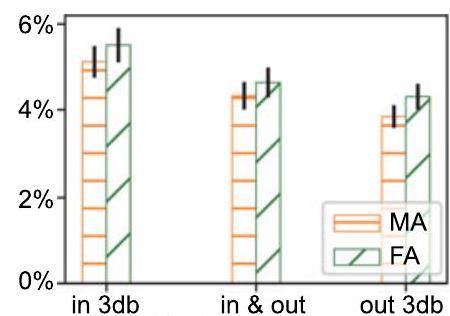
我们在a中展示了不同区域的呼吸暂停检测结果。环境人在3db -区域外移动时的MA和FA约为4%,小于在3db -区域内移动时的MA和FA。在随机进出3db区域时,MA和FA略大于在3db区域外的移动。
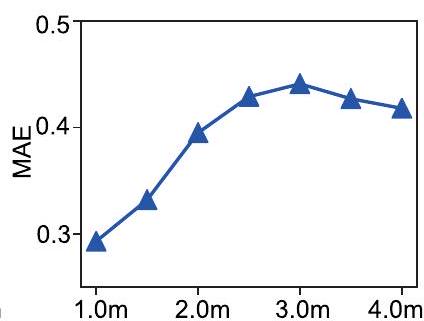
4.2.6 天线与被监护者之间的距离对呼吸暂停检测和呼吸速率估计的影响
在这个评估中,我们研究了天线\((A)\)和被监控人员\((P)\)之间的距离对系统性能的影响。不同距离下呼吸暂停检测结果如图a所示。MA和FA都随着\(A\)和\(P\)之间距离的增加而增加,当距离超过\(2.5-3 \mathrm{~m}\)时,MA和FA略有下降,这是因为随着\(A-P\)距离的增加,移动者所反映的多径信号的功率会减小。不同\(A-P\)距离的呼吸暂停检测误差差约为1.5%
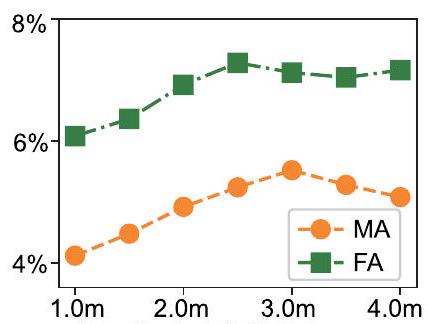
图b显示了不同距离下呼吸速率估计的mae。当距离从1 m增加到3 m时,MAE逐渐增大。
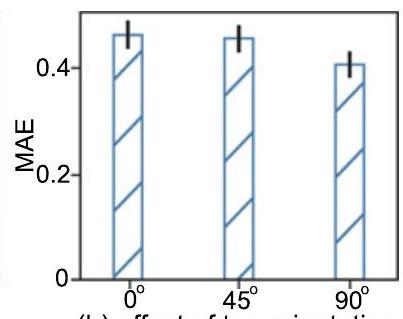
4.2.7 标签定位对呼吸暂停检测和呼吸速率估计的影响
在我们的实验中,我们选择了3个方向,包括0、45和90的标签到重力方向。不同方向的呼吸暂停检测结果如图a所示。所有标记定向下的平均呼吸频率(MA)和平均呼吸频率(FA)均低于5%,呼吸速率估计的平均呼吸频率(MAE)仅在0:4 bpm左右,如图b所示

 浙公网安备 33010602011771号
浙公网安备 33010602011771号