CloudCompare-点云标签
点云打标签流程
CloudCompare下载地址:https://www.cloudcompare.org/
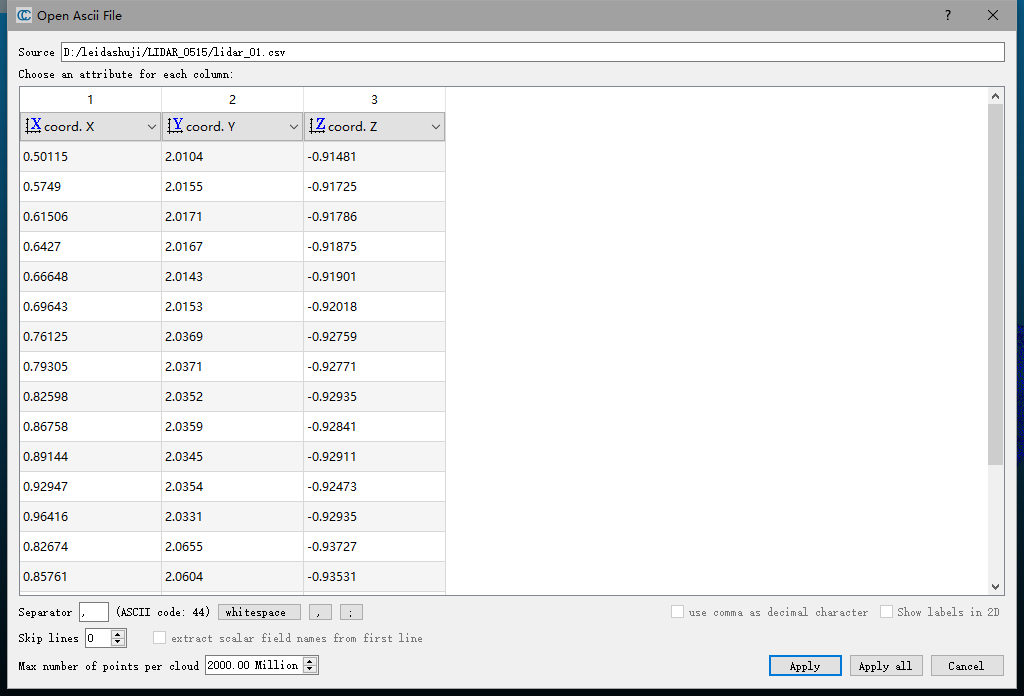
- 导入csv点云文件

- 直接apply
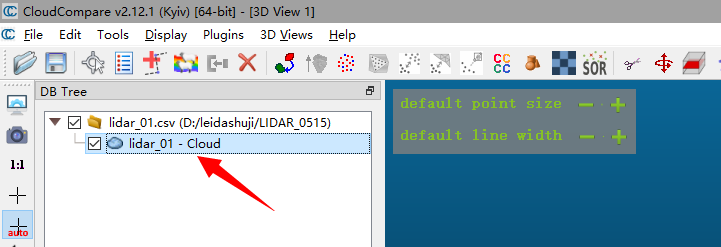
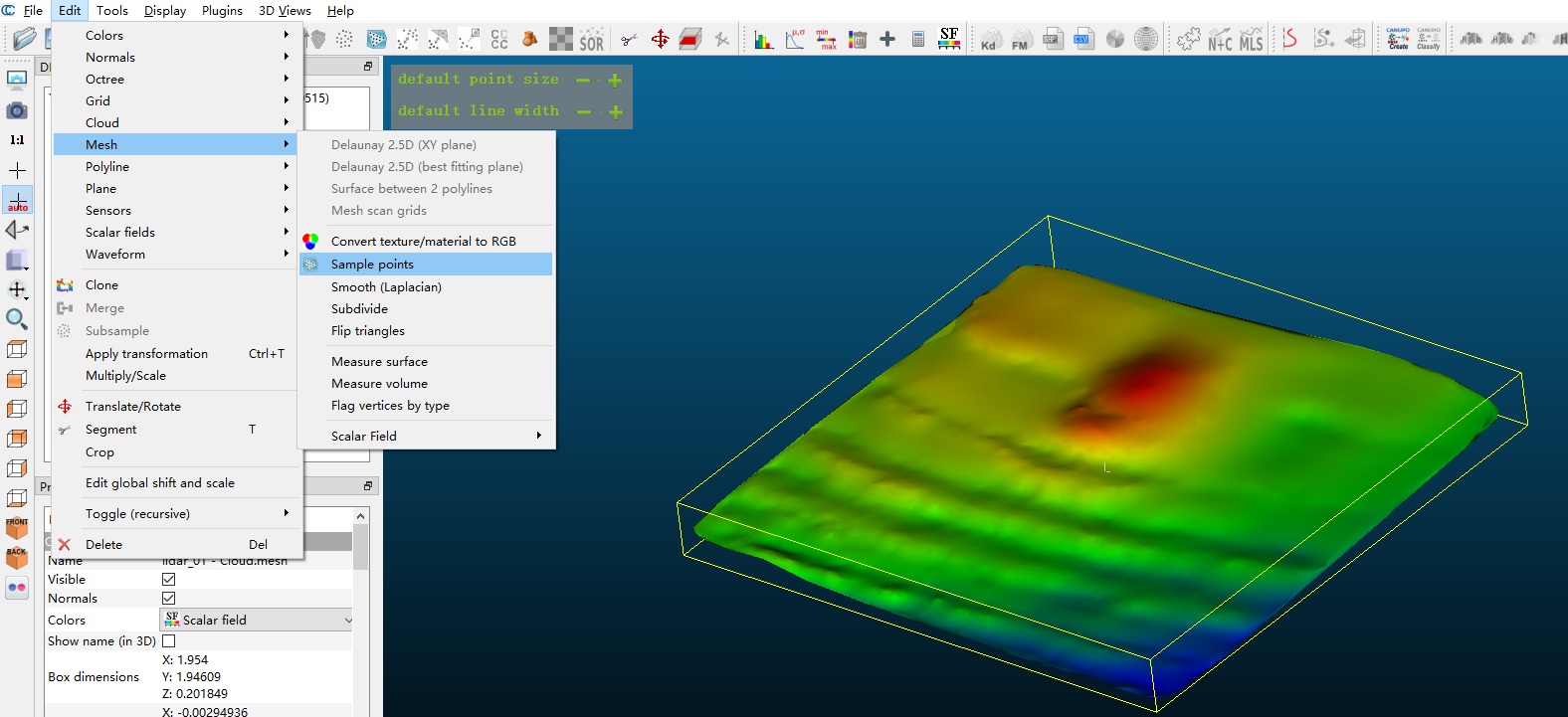
- 点击lidar_01-cloud
- 点击Edit>Mesh>Delaunay2.5D(best fitting plane)
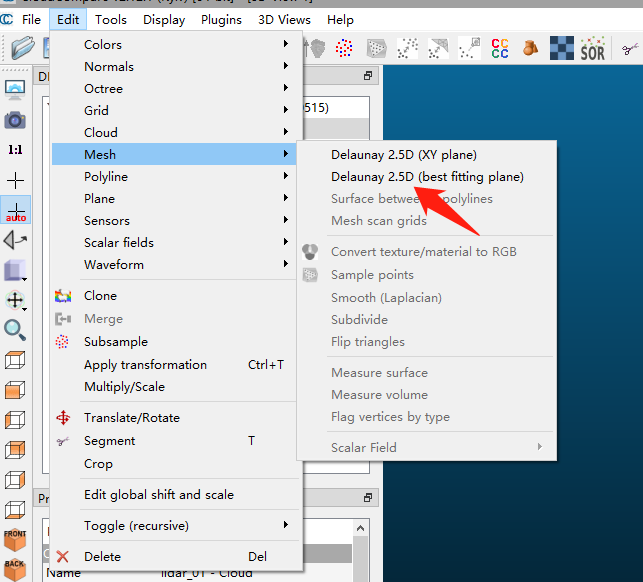
- 默认0

- 平滑:点击Edit>Mesh>smooth
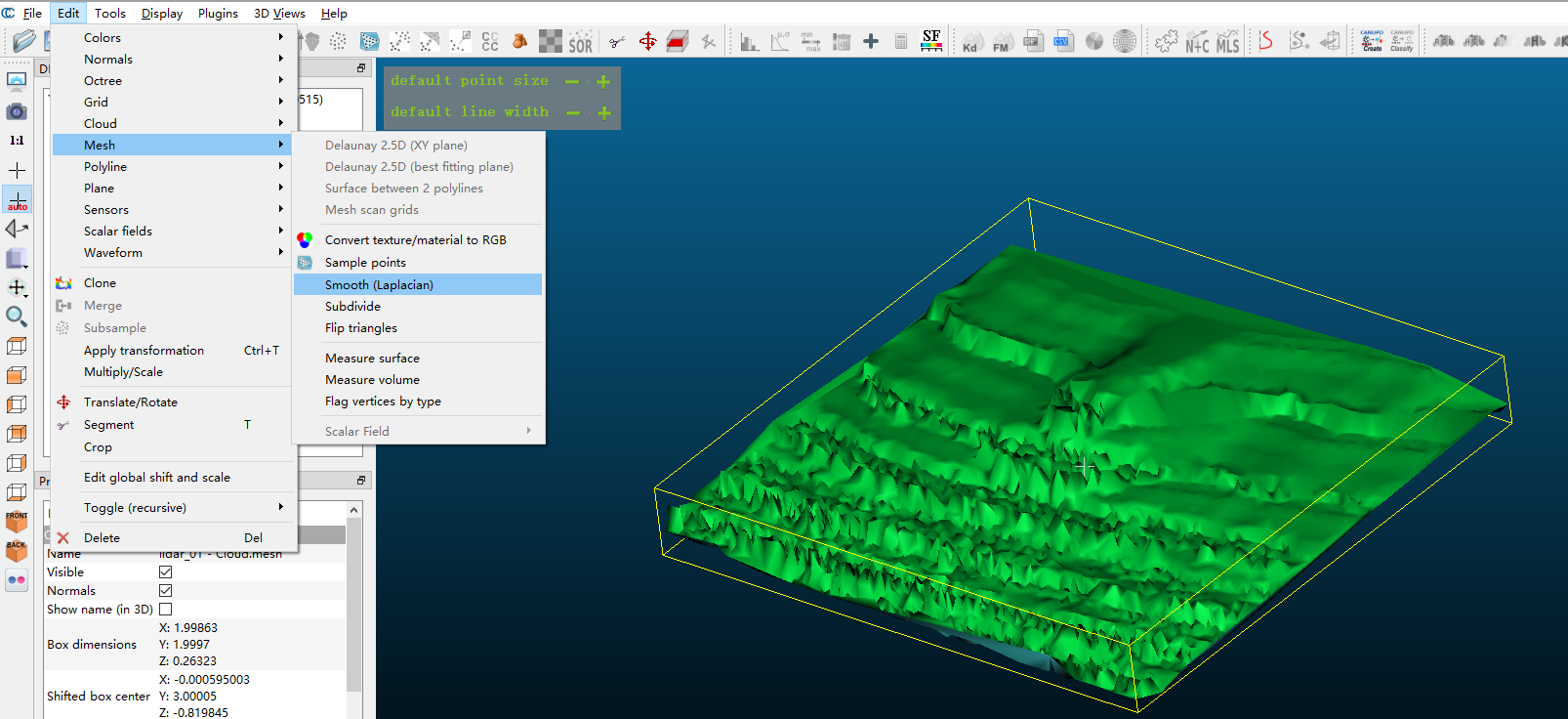
- 迭代次数:20,平滑因子:0.2
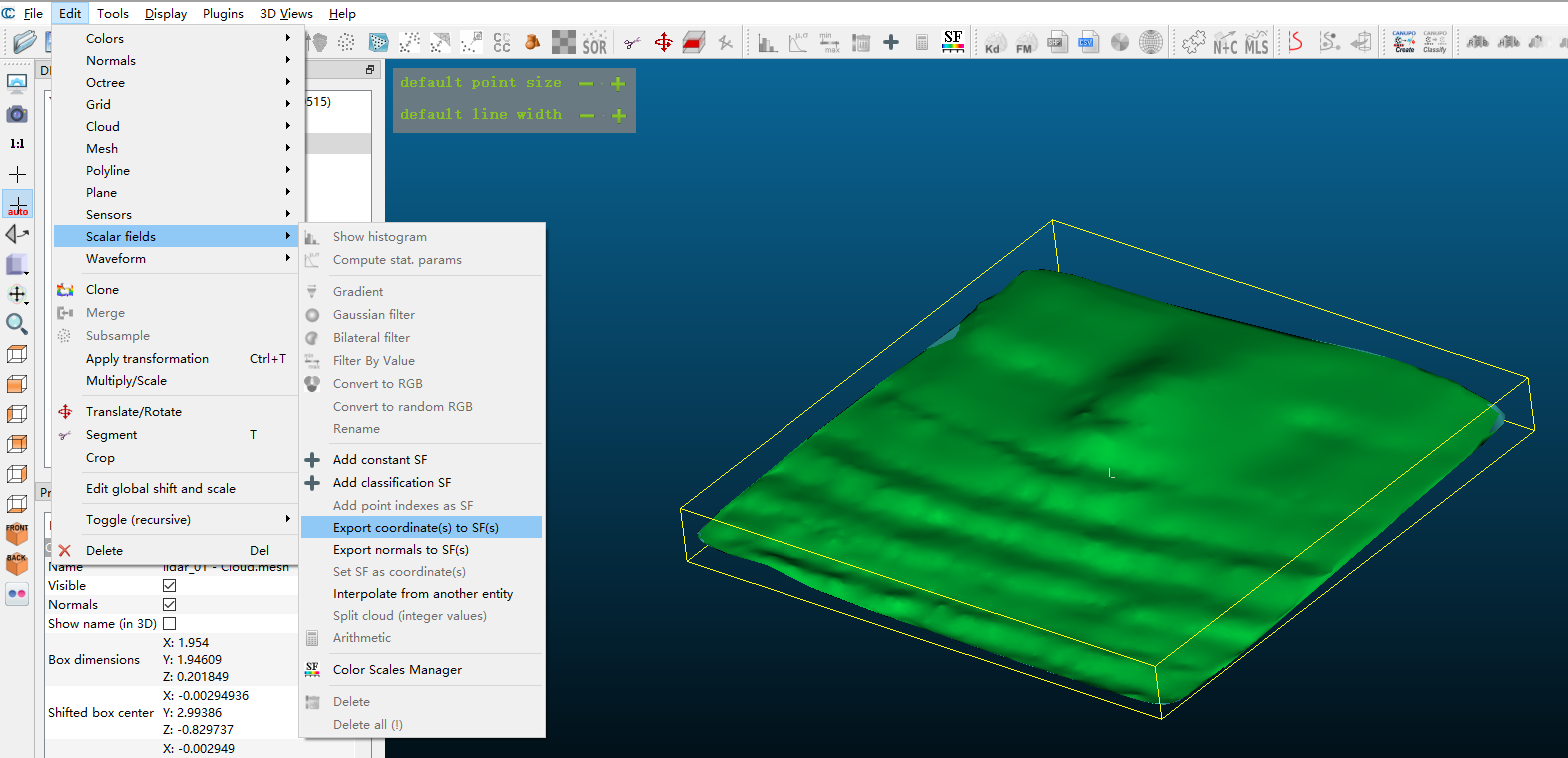
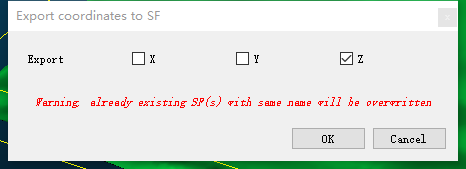
- 添加Z坐标参考,以高程图渲染点云
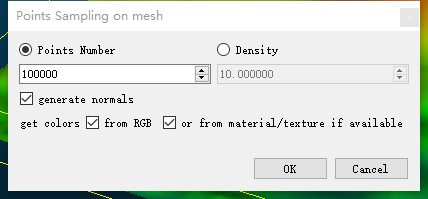
- 将.mmesh网格转换为点云格式,采样点数量设置为100000
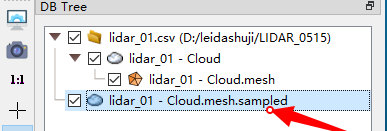
- 点击生成的.sampled数据
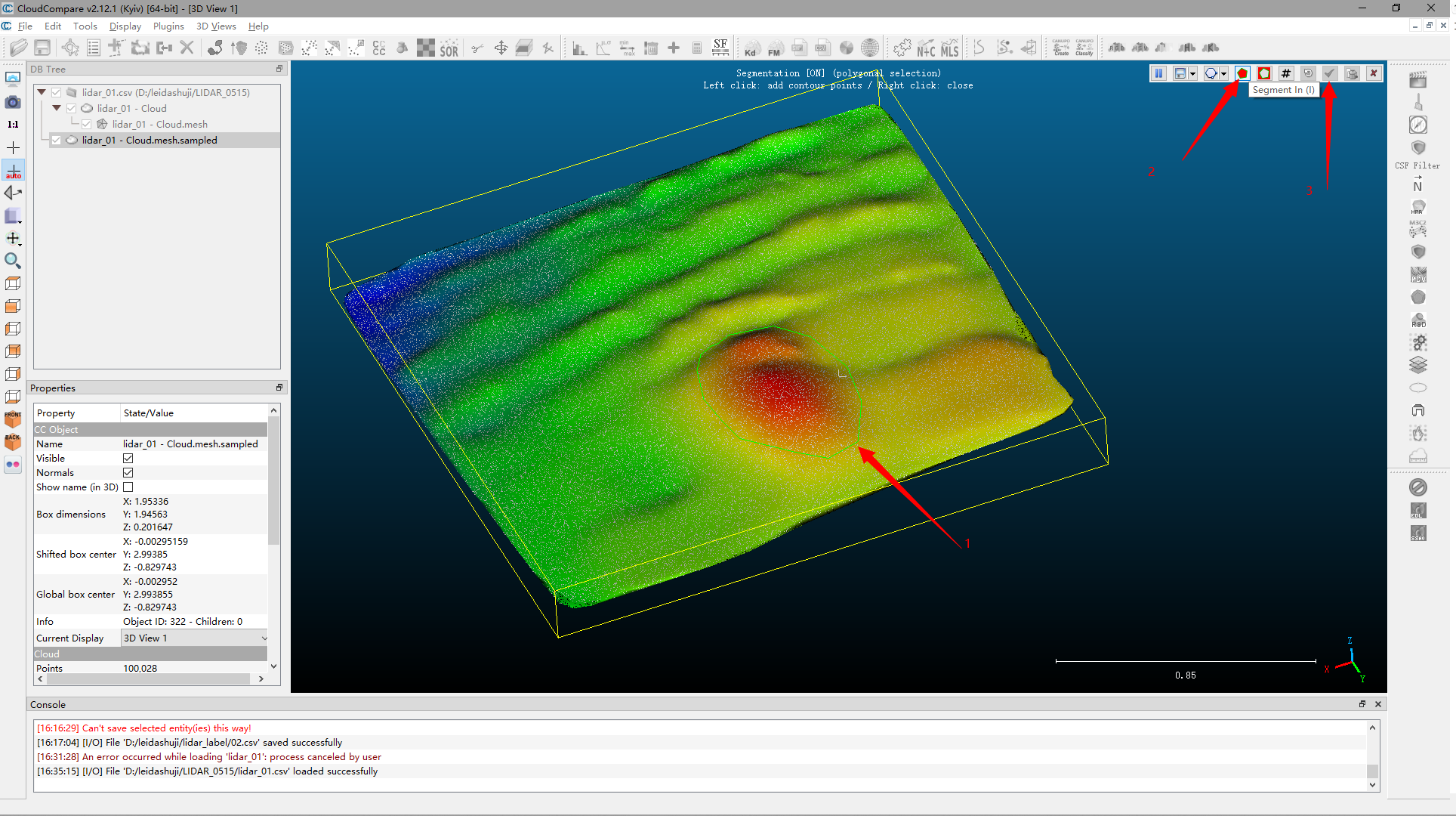
- 点击分割按钮

- 鼠标左键连续点击框选凹坑或凸起区域,注:鼠标左键点击间距应尽可能小,完成框选后鼠标右键确定。再按图中第2步,第3步操作。如果点云中有多个凹坑和凸起,重复第10步
- 对分割后的点云添加标签:将lidar_01-cloud删除,方便后续保存
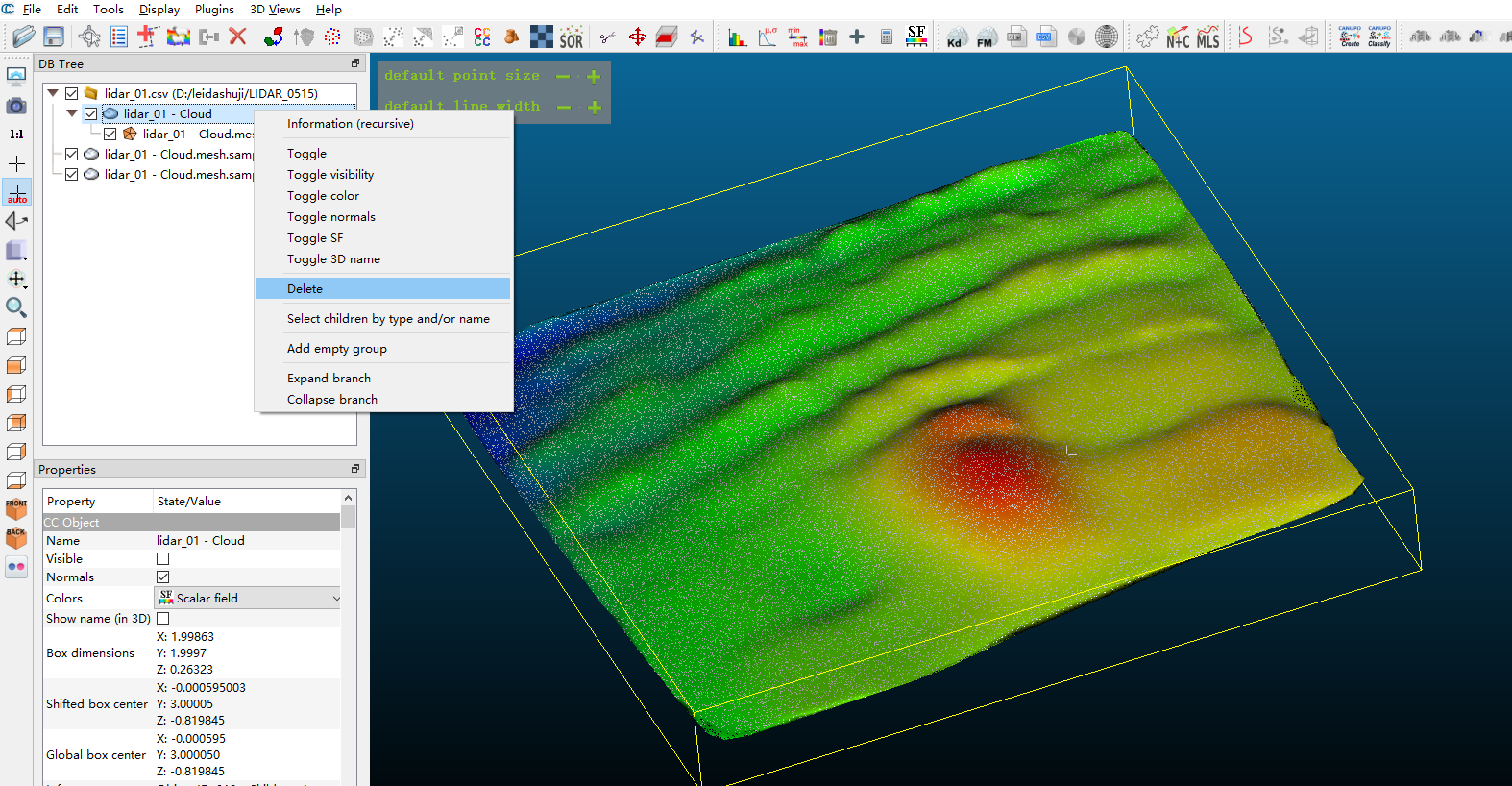
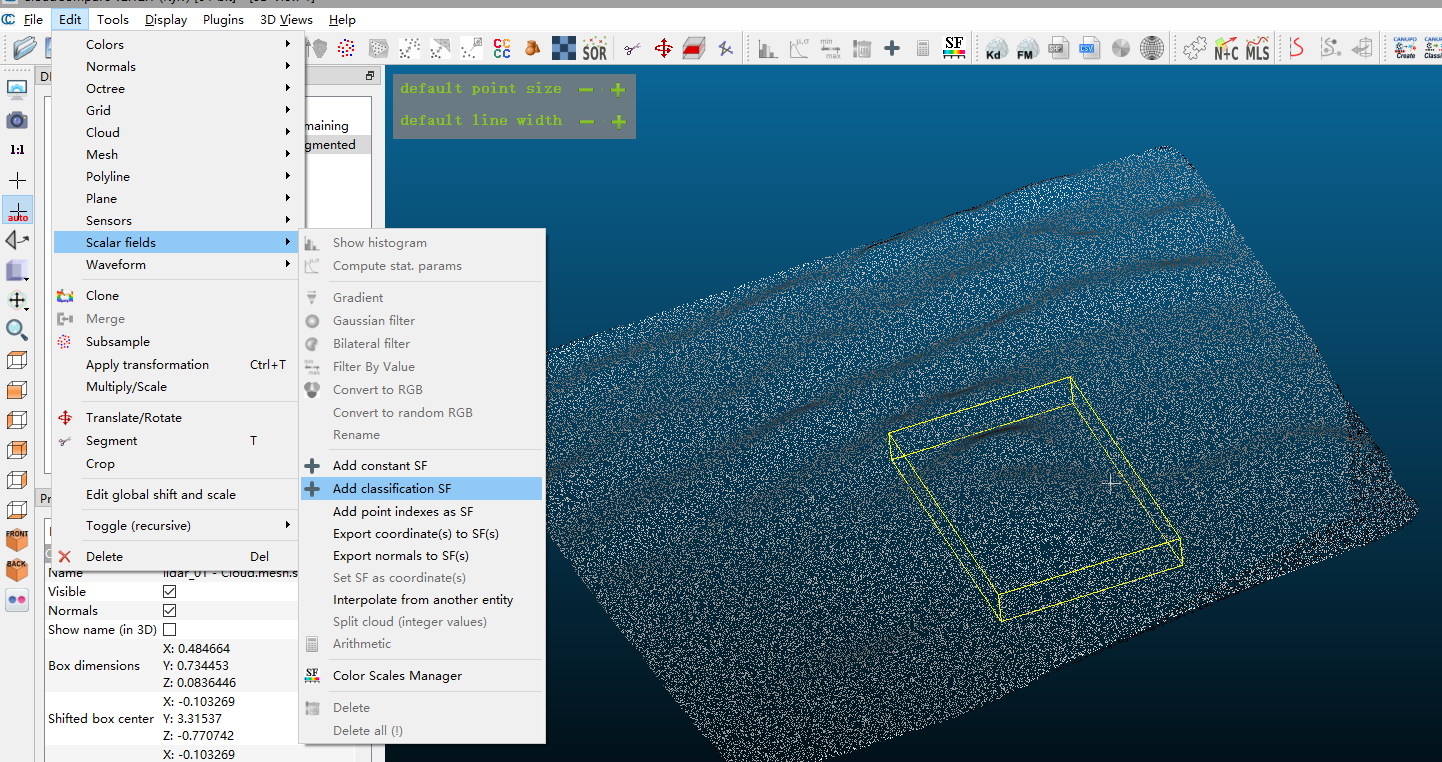
- 依次选择分割后点云,如选择第2个为凸起点云,第1个可看作是正常路面点云

- 添加分类标签,注:统一将正常路面设为1,凸起设为2,凹坑设为3

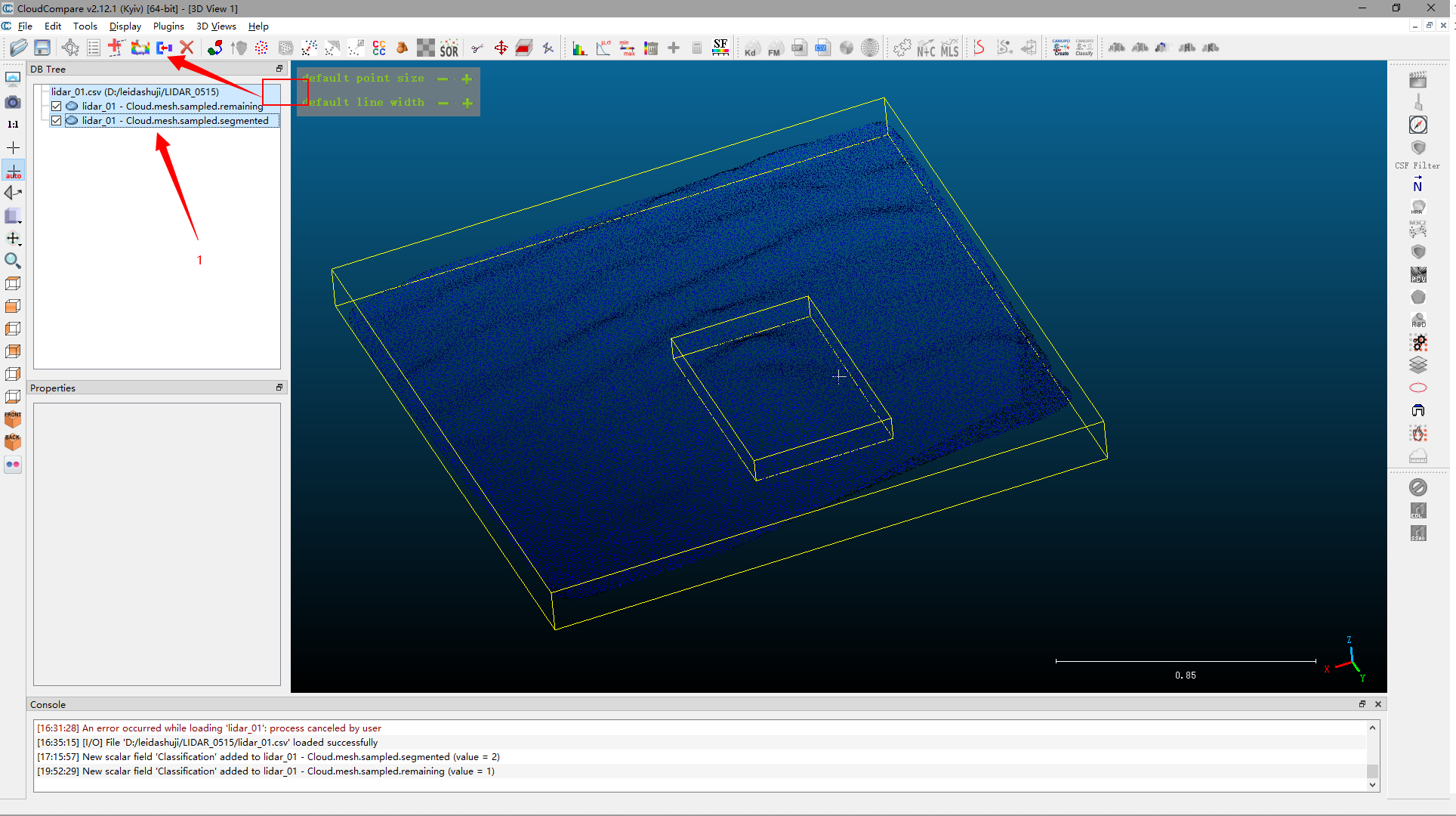
- 标签全部设置完后,合并点云,首先全选点云(记得在第11步删除lidar_01-cloud),点击合并按钮
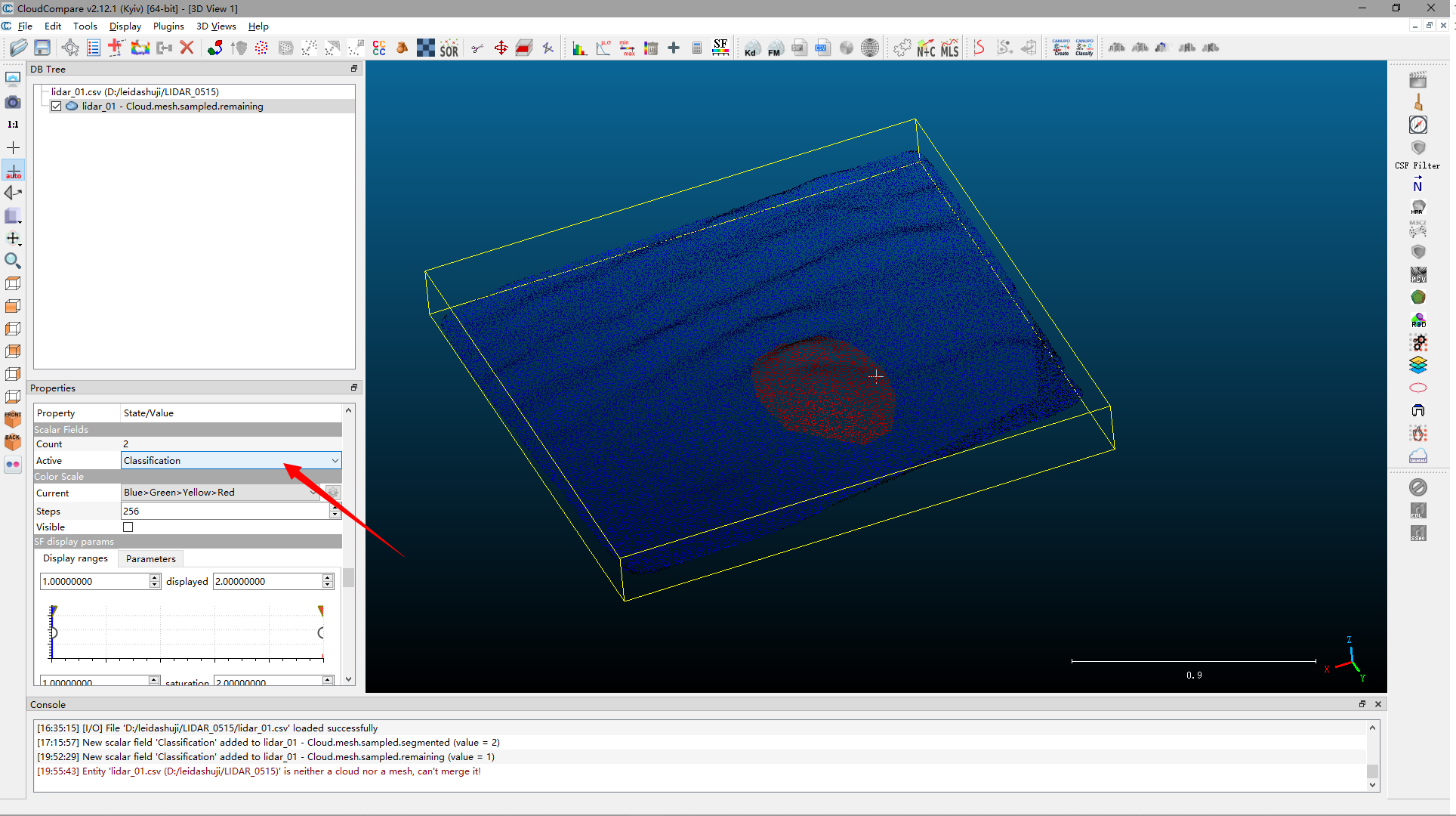
- 合并后选择Classification可查看分割状态
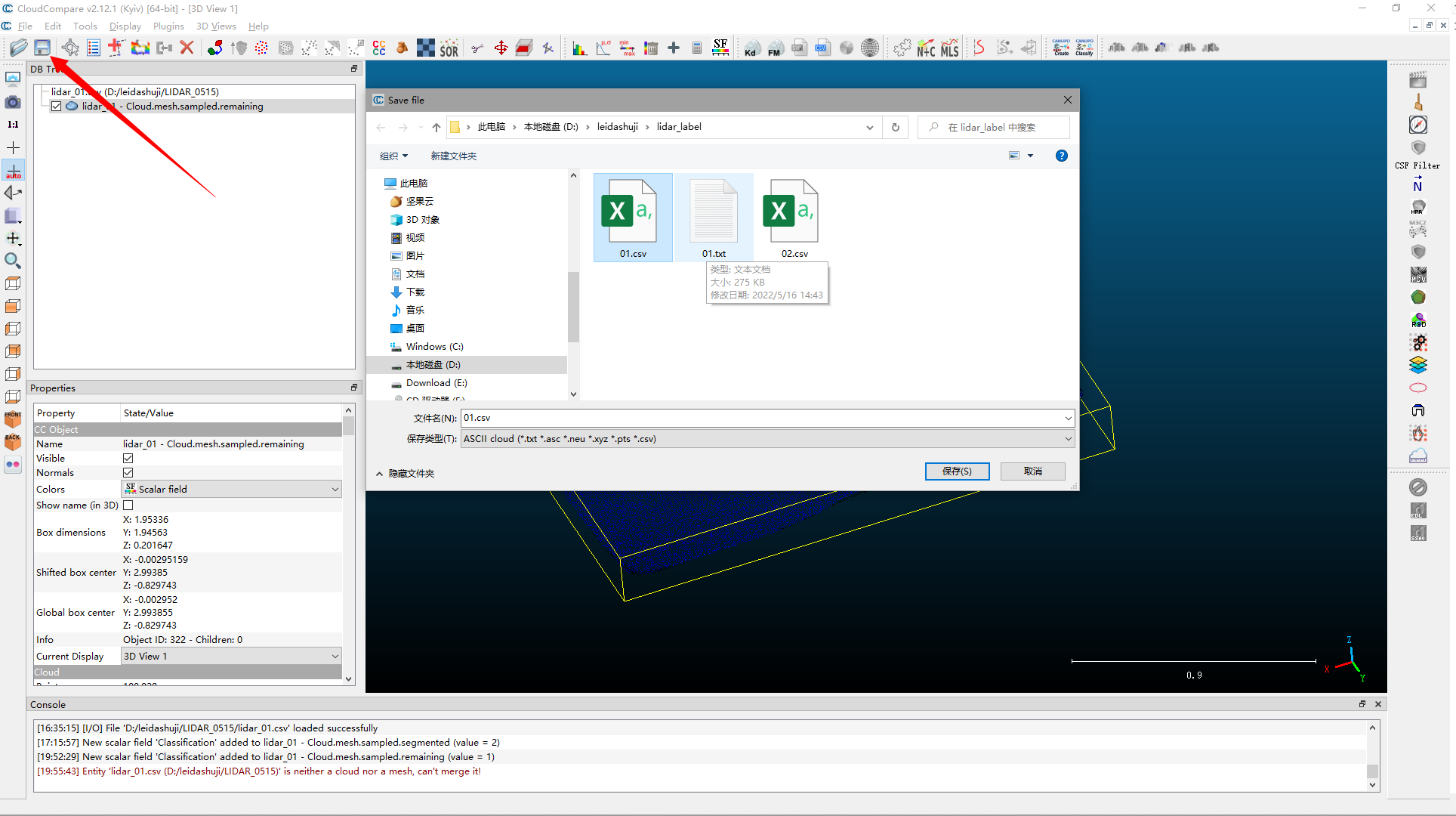
- 导出为.csv格式,点击保存按钮,保存为csv格式
- 导出设置,精度选择8和6,分隔符选择comma,header全选

- 导出数据如图所示


 浙公网安备 33010602011771号
浙公网安备 33010602011771号