
机器学习&数据挖掘笔记_20(PGM练习四:图模型的精确推理)
前言:
这次实验完成的是图模型的精确推理。exact inference分为2种,求边缘概率和求MAP,分别对应sum-product和max-sum算法。这次实验涉及到的知识点很多,不仅需要熟悉图模型的representation,而且还需明白图模型的inference理论,大家可参考coursera课程:Probabilistic Graphical Models 的课件和视频。多花点功夫去理解每行代码,无形之中会收获不少。新年第一篇博客,继续加油!
算法流程:
Sum-product求条件概率过程为(inference I):
(a): 输入factor list F、观察到的变量E
(b): 由F中的factor得到graph所对应的skeleton C.
(c): 依次进行变量消除,首先在图C中采用min-neighbors方法找到需要消除的变量。然后进行消除(其实就是factor的求和积分),消除过程中会用掉一些factor,同时也会生成一个新的factor(注意对新的factor补全各节点之间的边)。每消除一个变量就会得到一个clique,同时更新该clique与前面已得clique之间的edge情况。步骤c一直进行直到所有的变量都被消除掉。结束后得到一棵clique tree.
(d): 由于上面的tree中有冗余的clique(即某个clique可能是其相邻clique的子集)。这时需将这2个clique合并,该过程也称为树的剪枝:首先去点冗余的clique节点,然后将其sepset节点与该冗余节点其它所有邻节点都连接上边。
(e): 前面步骤得到的是clique tree skeleton,还需要对每个clique算出其factor表格,由于clique中对应的子factor信息已掌握,所以直接factor相乘即可(注意观察变量E).该步骤完成后就真正得到了一棵clique tree了。
(f): 接着对上面的clique tree进行message passing. 首先选出一个message通道,即找到那些clique i,和其连接的cliques中,只剩下一个clique j没有与之传递消息了,那么(I-->j即为通道)。不过这还是得按照某种节点顺序进行。
(g): 计算clique i发射到clique j的message,采用的方法是求和积分掉非公共元素。
(h): 当clique tree中所有的message都传递完成后,clique tree就变成calibrate了,而calibrate具有很多良好的性质,首先可以获得calibrate时每个clique的belief.
(i): 如果要求某个变量的边缘概率,则找到包含该变量的一个clique(随便哪个都行),在该clique上,对其belief求和积分掉其它所有变量,然后归一化即可。
Max-sum求概率最大时的assignment过程为(inference II):
(a)~(e): 和sum-product过程一样。
(f): 将factorlist中的val都取log值。因为需要将max-product转换成对应的max-sum问题。
(g): 和sum-product一样,对clique tree进行message passing. 首先选出一个message通道(I→j).
(h): 计算(I→j)之间的message. 采用的方法是max掉非公共元素。
(i): 当clique tree中所有的message都传递完成后,clique tree就变成calibrate了,采用factorsum计算每个clique的belief.
(j): 如果要求某个变量的max-marginal,则找到包含该变量的一个clique(随便哪个都行),在该clique上,max掉其belief 上其它所有变量,此时不需要归一化。
(k): 通过步骤j,可以得到每个变量的max-marginal factor,找到需要assigment中元素对应的factor,取出其val中最大概率值对应的var,组合在一起为最终的结果。
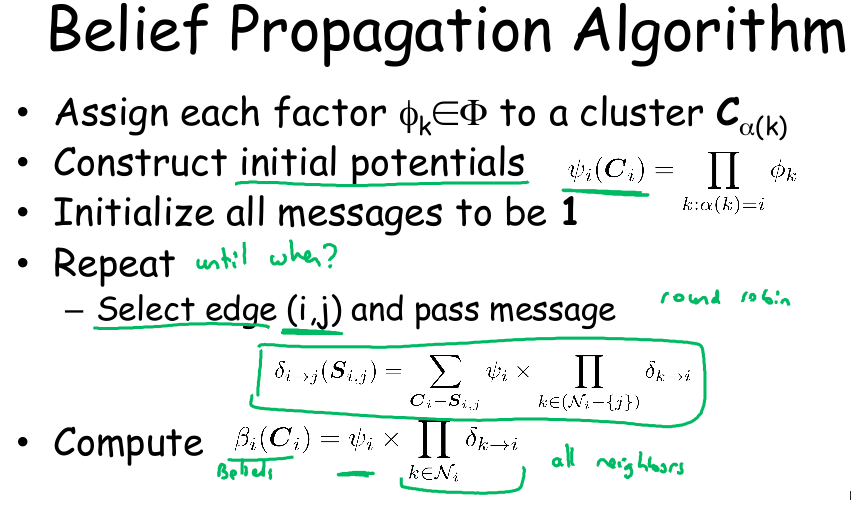
Belief propagation流程如下:
matlab知识:
C = unique(A):
如果A是向量,则C表示去掉了A中重复的元素(只保留1个)。
C = union(A,B):
如果A和B是向量,则C为A和B的并集,且去掉了重复的元素(只保留1个)。
在matlab中,true只表示数字1,其它非1的数都不能表示,而false只表示0.所以其它整数既等于false也不等于true.
实验code中一些函数简单说明:
P = ComputeInitialPotentials(C):
练习1所需完成的内容。该函数的作用是计算clique tree P的初始势能。其中C是P的骨架部分(骨架的意思是有clique节点,但是没有clique对应的factor,而这个函数的主要功能就是给每个clique都弄一个factor表),C结构体包括节点nodes(每个node都是一个clique),边之间的关系edges, 以及factor集合factorList. 返回的P结构包含2部分,clique tree节点之间边的edges, 以及clique集合cliqueList, 该集合的每个clique形式和factor是一样的,其计算方法是:计算factorList中属于同一个clique的factor的乘积,并将新factor中的assignment按照var按升序一一整理。
[i, j] = GetNextCliques(P, messages):
练习2所需完成的内容。该函数返回一个矩阵的下标索引i和j,意思是选择从clique i到clique j的消息用于下一次传递。选择这个消息的依据是:与clique i连接的所有cliques中,只剩下一个clique j没有与之传递消息了,则(I,j)就是下一次所需传递的。
P = CliqueTreeCalibrate(P, isMax):
实验3和实验6的内容。其中P是clique tree,isMax如果为1,则置信传播时采用max-sum,,否则采用sum-product. 该函数的作用是对tree进行calibrate.
[newF C E] = EliminateVar(F, C, E, Z):
F为factorList, C为clique tree的骨架,E为factorList中factor edge的连接关系。该函数作用是对F进行变量消除,消除的变量为Z。newF为变量消除后得到的factorList. 返回的C中多了一个edge项和factorInds项,该edge表示两个clique之间的连接情况,而factorInds表示产生新的factor后还剩多少个factor(这个参数只在本函数内部使用,用来计算edge矩阵的,对外没作用)。大概的实现思想为:将含有需消除变量的factor相乘得到一个新的factor,并对这个factor进行Z边缘化(积分掉Z)后得到更新的factor。最新的factor和剩余暂时没有进行变量消除的factor放在一起,构成newF.
C = PruneTree(C):
C依旧为clique tree skeleton. 该函数是对C进行剪枝,依次扫描C的node i,如果某个node是它邻居node k的子集,则将i与k之间的边去掉,且将k与i的其它所有邻居node相连接。该处理的目的是为了维持RIP特性,获得更紧凑的clique tree.
F = ObserveEvidence(F, E):
F为一个factor的容器。E为一个2列的矩阵,每1行代表1对观察值,其中第1个元素为变量名称v,第2个元素为该变量对应的值,假设为x。作用是在F的每个factor中,只保留变量v等于x时对应assignment的值,而变量v等于其它值的assignment值都清0。但不改变每个factor表格的大小,只是有很多0值的行而已。
P = CreateCliqueTree(F, Evidence):
F为factorList,P为clique tree, Evidence为观察到的变量。该函数是用F来构造P。其大概过程为:用F构造骨架C,对C使用EliminateVar()进行变量消除,得到冗余的clique tree,接着调用pruneTree()对clique tree剪枝,去掉冗余的cliuqe。最用调用ObserveEvidence()进行factor reduce, 同时函数ComputeInitialPotentials()获得clique对应的table.
B = FactorMarginalization(A, V):
A,B为factor,V为变量的集合。该函数的作用是在factor A上求和积分掉V中的元素,得到新的factor B. B的尺寸当然变小了。
M = ComputeExactMarginalsBP(F, E, isMax):
实验4和实验7的内容。F为factorList,E为Evidence. 先调用CreateCliqueTree()创建clique tree, 然后调用CliqueTreeCalibrate()对树进行校正。当isMax为0时,调用FactorMarginalization()计算边缘概率,否则用FactorMaxMarginalization()来计算。
B = FactorMaxMarginalization(A, V):
实验5的内容。边缘化factor表,不过这时不是对V变量求和,而是求其中的最大值。和
函数FactorMarginalization()基本一样,需将sum改成max. 同时需要考虑当factor中val值为负数的情况,如果所有这些值都为负数,则max后应该也为负数,而我们初始化时一开始B.val为0,要小心(加一个if语句判断即可)。
A = MaxDecoding( M ):
实验8的内容。找到M中每个元素的val向量值最大的那个所对应的var,并将该var赋给对应的A. 这就是max-decoding过程。
相关的理论知识点:
主要参考Daphne Koller的PGM教材和courera教程,还有网友的PGM笔记。
factor的其它名字:affinity(密切关系), compatibility(兼容性),soft constraints. factor与联合概率没有直接关系,还需考虑其它的factor.
一个图G是一个分布P的I-map是指图G所诱导出的独立性断言是P独立性断言的子集。
如果图G是分布P的I-map,则分布P可以按照图G来分解。反之,如果分布P能够按照图G来分解,则图G是分布P的I-map(以上在BNs网络内成立).
BN中complete graph是指不能再往图中多加边了,否则会构成环。因为complete graph中没有任何独立性断言,所以所有的complete graph是任意分布P的I-map.
BN的skeleton: 是一个无向图,包含BN的所有顶点,把每条有向边都对应一条无向边。
I-equivalent: 如果2个图具有相同的独立性断言,则这两个图是I-equivalent. 其一个充分条件为:如果两个图含有相同的 skeleton 且对应的 v-structure(common effect)也相同,则他们是 I-equivalent 的。
如果 v-structure 中没有两个 prior 之间的边,我们就称这个 v-structure 时 immorality,否则这条边称为 covering edge. 两个图是I-equivalent关于v-structure的条件更松一点,只需要其中 immoral 部分的v-structure即可. 另一种表述:如果两个图是 I-equivalent,当且仅当存在一个 graph 序列,每两个相邻的graph仅仅是将 covering edge 转向.
positive distribution: P为正分布是指:只要事件A不为空,则P(A)>0. 正分布具有intersection特性(独立性中的交叉律)。
minimal I-map:给定一个独立性断言集合,图 是 minimal I-map 当且仅当G是该独立性断言集合的I-map,且G中去掉任意一条边都会导致其不是I-map. minimal I-map比较容易获得, 且不唯一。不同的节点构造顺序可造出不同的minimal I-map。由此可知,单单由P的I-map不足以保证该graph提取出P中所有的独立性结构。
perfect I-map: 图G的独立性断言和分布P的独立性断言相等,也叫P-map. perfect I-map比较难获得。虽然P-map可以完全capture分布P的结构,但并不是所有的分布P都有其对应的P-map,比如具有与四边形MRF相同独立性的P,或者具有与XOR网络独立性相同的P都是没有对应P-map的。
对正概率情形,GRF、global Markovian、local Markovian 和 pairwise Markovian 是等价的.
BN的参数是CPDs,而MRF的参数是factors. MRF中的联合概率是由所有的factor决定的。
clique:就是最大完全子图。一个图中可能会有多个最大完全子图,它们彼此之间的顶点个数有可能不相等(因为最大完全子图表示不能再往里面加入节点了)。而这些clique中节点个数最多的那个叫做largest clique.
Clique potential:如果将MRF分解成的最大完全子图(MRF中的完全子图是指子图中任意2个节点之间都有连线,注意与BN中完全子图的概念区分开,BN完全子图是指不能往子图中加任何边,否则会构成环),则每个完全子图构成的factor都叫做clique potential.
Pairwise Markov Network: 网络中所有的factor只有2个变量。带有n个节点的fully connected pairwise markov network,如果每个节点的取值有d个,则该图中共有O(n*n*d*d)个参数(先用组合的方法求出edge的个数,然后每个edge都有d*d个参数)。而如果要描述图中所有的分布,则需要更多参数(O(n^d)),因此pairwise markov network并不能描述所有的分布。
GRF(Gibbs random fields):比pairwise markov network更广,因为它的每个factor可有多于2个的变量,且每个factor中所有的变量之间都有连线。
CRF和GRF的不同处在于划分函数,在GRF中,划分函数的值是一样的,在CRF中,划分函数值和输入的X有关,不同的X对应的值不同。logistic regression是一个简单的CRF,只需在CRF中将factor定义成指数形式。
分布P能够按照图H分解是指,存在一个factor集合,且由该集合中所有factor的乘积归一化后得到的概率和P相等。由这些factor集获得的图为H,H也叫是induced graph. 但是我们不能反过来从图H中来得到这些factor集,因为这样会得到多个答案。
如果P能够按照H分解,则H中的separation对应于P中的条件独立。对正分布P而言,如果H是P的一个I-map,则P能够按照H来分解。
graph越sparse,则参数越少,含有的独立性信息越多。
Reduced Markov Network: 去点一些节点以及与这些节点相连的边后得到的网络。
在MRF中,如果图H是分布P(positive)的I-map,则P是Gibbs分布,且P能按照H进行分解。
Soundness: 可靠性,由语法蕴含推导出语义蕴含。用来证明一个东西是错的。
Completeness,完备性,由语义蕴含推导出语法蕴含。用来证明一个东西是对的。
Markov blanket:一个节点的Markov blanket指的是该节点的父节点,孩子节点以及孩子节点的另外父节点。
I(H):MRF中的全局独立性,没有active trial.
Il(H):MRF中local独立性,给定Markov blanket.
Ip(H):MRF中的pairwise独立性, 非相邻,给定其它节点。
其中Il(H)蕴含了Ip(H), 而I(H)蕴含了Ip(H).
对正分布的P而言,上面3种独立性是等价的。
当P是正分布时,可以从P获得唯一的minimal I-map H. 当P为非正分布时,构造出来的H不能保证是I-map.因为此时的Il(H)和Ip(H)都不能蕴含I(L).
MRF的参数表达有3种形式:a product over potentials on cliques; a product of factors; a product of feature weight. 其表达形式依次更细致。应用场合不同,weight模型主要用于求解参数,factor模型主要用于推理。
贝叶斯网络在观察到一条边后是Gibbs分布。
Moral Graph:一贝叶斯网络G中Moral Graph是个无向图,记为M(G), 它是将v结构的2个父节点之间加入一条边,且将所有的有向边变成无向边。M(G)是G的minniial I-map.
moral:一个贝叶斯网络是moral的,当且仅当其所有的v结构中两个父节点之间都有连线。如果一个图G是moral的,则M(G)是图G的一个perfect map.这样的图G如果转换成markov network的话是不会丢失独立性信息的。遗憾的是,实际情况中,属于moral的图很少。moral graph可以用来证明d-seperation的合理性。
如果贝叶斯网络G是MRF H的minimal I-map, 则G是moral graph(和书中说的没有immoralities是一个意思)。
chordal:图中所有的loop边长不大于3。将BN转换成MRF的过程叫做triangularization.
Chordal graph:在MRF中,没有边长超过3的环。也就是所有环的长度都是3.
BNs和MNs之间的相互转换会导致一些独立性的丢失。比如说从BN转到MN时,v-structure的独立性会消失。
Log-linear model: 在该模型中,P可以由指数表示。指数型一般为多个系数与特征的乘积,因此是线性的(取对数后也是线性的,因此叫log-linear模型),每个特征都有scope,不同特征可以共用一个scope.
很容易知道,每一个factor table都可以转换成log-linear model,只需将特征取为合适的指示函数,且前面的系数和factor table中的值成log关系即可。
如果一个距离函数满足自反性和对称性,则称为semi metric,如果还满足三角不等式性质,则称为metric. Metric MRF中的特征为,相连接的2个节点(每个节点都在同一个向量空间内取值)具有相似的值,所以它的特征是一个距离函数。越相似,距离越小,则得到的概率越大。一般的距离函数可以取两者的绝对值(或者限制绝对值)。在segmentation领域,Metric MRF利用的特征为:相邻的超像素趋向于相同的类别。在denoising领域其使用的特征为:相邻像素趋向相同的像素值。
Ising model和Matric MRF一样,也是一个feature-based model。Ising model来自统计物理,是一个pairwise Markov network. 其特征取两个相邻节点的乘积(在磁场中,判断两个方向是否一致)。并且其指数项还有一个温度系数T,用来控制惩罚的强度。
Tabular CPD的局限性是表格大小随着变量个数呈指数增长。为了减少参数,CPD形式一般采用函数的形式来表示。这样的模型主要有deterministic CPD, tree-structured CPD, logistic CPD&generalizations, nosiy and/or, linear gaussians&generalizations.
Tree-structured CPD能够减小参数时因为在tree中隐含了很多独立性的信息,比如说给定一个节点,则目标的条件概率与该节点的兄弟节点所在树分支无关(即独立),因此对应的tabular CPD中就可以减少很多项。tree-structured CPD一般与context-specific 独立性有关。
Multiplexer CPD: 有一个开关,不同开关值对应不同的结构,因而有不同的独立性信息。这和电路中的多路选择器是一样的。
noisy on/and/max等都类似,即多个父节点之间取on/and/max等关系。这种表示方法当然可以减小参数个数。
sigmoid和linear gaussian是输出连续概率值的模型。
interface variable:指那些在t时刻能够直接影响自己在t+1时刻的变量。
Inter-time-slice edge:不同时刻间变量之间的边。
Intra-time-slice edge:同一时刻里变量之间的边。
Dynamic bayesian network(DBN):是一个时序模型,对应一个初始分布和2-TBN过程。它有2个假设:markov 假设和时序不变性假设。2-TBN对应的是条件概率(注意不是联合概率),且该条件概率是按照图的结构来分解的。
Ground network: unrolled network.展开的网络。
Linear dynamical system(LCS):也叫kalman filter,它是一个DBN,且满足所有的变量都是连续的,变量之间的独立性满足linear gaussian.
常见例子中,时序模型中的template variables/attribute(一类变量)可以是time, person, pixel, student, course等。
markov假设是个很强的假设,一般不会成立,为了使其更好的近似成立,可以加入当前时刻的一些其它信息。另外semi-markov也能够更好的近似。
在plate model中,每一个box(方框)都叫做plate. plate里面的node都是需要index的。plate可以嵌套,可以重叠。
在模型的表述中,要考虑template-based vs specific; directed vs undirected; generative vs discriminative. 或者它们的混合。在模型的结构上,需要考虑causal vs non-causal.
Generative model适用于数据缺失或标签比较难获得的领域,且它能够产生数据。discriminative model适用于标签多或者高维变量的领域,它不需要拟合联合分布。
在MN中,factor的个数一般等于变量的个数,而在MRF中factor的个数一般大于变量的个数。
计算P(X=x)或者验证P(X=x)>0都是NP-hard的,不过这是在worst case情况下,在general case情况下还是可以计算的。
图模型中一般有两种类型的inference。第一种是求解部分联合概率(包括边缘概率)或者条件概率,一般采用的方法是sum-product。其中sum对应将无关变量求和消 掉的过程(variable elimination),product对应多个factor的乘积。如果是在求条件概率时,则这些factor应该为reduced factor;另外还可以采用belief propagation或者变分法. 第二种推理过程为MAP(最大后验),即求给定evidence时,其它变量(除去evidence后的所有变量)出现的最大概率对应的组合(此时求得不是最大概率,而是变量的configuration)。因此MAP得到的结果可能不唯一。求解该推理可以采用max-product,其中的max是根据定义求概率最大时的变量组合,prodcut依旧是factor(reduced factor)的乘积,这个过程也会可以采用variable elimination. 类似的,还可以用max-product belief propagation,或者integer programming, 或者combinatorial search.如果是一些特殊的网络则可用graph-cut. 注意这里的MAP不等于Max over marginals(对应每个变量单独取最大值的组合)。
变量消除法在BN和MRF中都可以使用。
变量消除算法的复杂度和2个因素成线性关系:一个是关于model本身的factor个数和变量个数;另一个是中间产生的factor表格的大小(最大那个table的行数,这个行数与表格的scope成指数关系,所以是影响算法复杂度的关键)。由变量消除复杂度分析可知,不同的变量消除顺序的计算复杂度是不同的。
moralization: 将BN转换成MN时的过程,将有向边变成无向,还需要在对应的v-struction中加入边,这个过程也叫做moralization.
在对应的graph上进行变量消除时,可能会加入fill edge,因为得到的新factor可能变量之间没有边,此时需要手动加入边,这条边就叫做fill edge.
Induced graph: 是一个无向图,由变量消除得到的。induced graph与factors以及变量消除的顺序有关,不同的变量消除顺序可能引入不同的fill edge.
变量消除过程中产生的每一个factor都是induced graph里的一个clique.反过来也成立。
induced width: 指的是largest clique中节点个数减1.
minimal induced width:所有变量消除顺序中得到的induced width.
变量消除过程可以看做是对无向图的变形过程。
在图H中找到一个变量消除顺序使得induced width长度小于K是一个NP难问题。所以一般采用启发式搜索,启发式的cost function可以为:min-neighbors;min-weight;min-fill;weighted min-fill.其中min-fill最常用。
Cluster graph: 是一个无向图,图中每一个节点(该节点也叫cluster)都是整个scope的一个子集,cluster graph具有family-preversing特性,即每个factor的scope都是cluster中某个节点的子集。两个cluster之间的边为两节点scope交集的子集。
Cluster tree: 变量消除的过程就会得到一个cluster graph. 其实,更准确的说,这个消除过程得到的是一棵树,因为消除过程是有方向的,最后箭头指向的终止节点为我们需要计算的值,这个节点也称为root(注意和数据结构中的root稍微不同,这里箭头指向root,而数据结构中是由root指向其它节点),从其它节点流向root的过程也叫做up-stream. 这棵树叫做cluster tree,是有方向的。
Running intersection property(RIP): 只要cluster tree T中某一个变量同时属于2个节点,则该变量存在于这两个节点连接的path上每(且是唯一的一条path,否则这个变量会构成环来传播)一个节点里。此时称该cluster tree具有RIP特性。
Clique tree: 如果cluster tree满足RIP特性,则该cluster tree也叫做clique tree,原先节点cluster也叫做clique. Clique tree和cluster tree的不同之处在于,edge上的变量不再是相邻cluster scope交集的子集,而只能是交集。另一种等价表示是对任意一个变量x,由clusters和sepsets构成的path能够构成一棵树(既不能断开,也不能有环).可以用变量消除得到clique tree,也可反过来用clique tree进行变量消除。
belief:clique tree中当前clique的势与其所有邻节点传过来的message乘积之和。
calibrated: 当两个相邻的clique对自己的belief消除非公共变量后得到的message相等时,则称它们是calibrated.
Calibrated clique tree: 满足clique tree中所有相邻的clique都是calibrated的。
Calibrated belief:满足calibrated公式时的那个值。
如果BP算法过程收敛(收敛意味着当前时刻发射的message和下一时刻发射的message相等),则可以推断出cluster tree是calibrated的。
除了可以用VE(表示变量消除)进行inference外,还可以用message passing.
在cluster graph中,BP(belief propagation)算法可能不收敛,且计算结果是近似的,通过它计算出的边缘概率也叫pseudo-marginals.虽然这样,不过在实际应用中还是很有用的。但在clique tree上进行BP得到的边缘概率是正确的。
Bethe cluster graph:由factor构成cluster,且每个变量也单独构成cluster,这个single cluster与前面的cluster节点元素有交集时需要添加一条边。bethe cluster graph同时需要满足RIP性质。
Sepset belief:指2个cluster之间edge上两个方向发射出来的message的乘积。
reparameterization: 因为每两个cluster之间的message在cluster belief和sepset belief中都出现了一遍,所以如果将所有cluster belief的乘积当做分子,所有sepset belief之间的乘积当做分母,则两者之间的比值等于各个cluster初始势能的乘积(unnormalization),这个性质叫做reparameterization. 这意味着进行message passing过程时没有信息丢失。
在clique tree中由RIP特性可以推断出clique tree是correctness的(指的是VE过程和message passing过程得到的结果一致)。
在clique tree上进行message passing时,如果message传递的顺序是正确的(必须从叶子节点开始传递),则仅仅需要传递2(k-1)次message, k为tree中的edge数。
Answer question:计算后验概率,给定evidence Z情况下计算后验值X的概率(这也叫做incremental inference).分为2种情况,一种是X和Z在同一个cluster中,此时直接reduced cluster即可。另一种情况是X和Z在不同的cluster中,则需要重新用message passing来计算与Z相关的那些cluster.
Cluster tree满足RIP特性,当且仅当某边两侧单独出现的变量在这条边变量下相互独立。也就是说cluster tree中蕴含了条件独立性。
通过VE可以得到correct clique tree.
BP算法的收敛性具有局部性,且不能保证收敛,即使收敛也不能保证结果正确。因此通常会采用一些小技巧,比如说选合适的VE顺序,采用异步message passing方式,采用TRP(Tree reparameterization)或RBP(Residual belief propagation)方式传递,或者用damping技术。
一般可将max-product问题取对数后变成max-sum问题,当然也可以加入负号后变成energy minimization问题。
在max-sum中引入2个新的操作,factor sum和factor maximization.很容易从字面意思理解其操作。这2个操作分布对应message passing过程中的belief计算和message计算。
使用max-sum算法对chain进行变量消除时,最后得到的结果称为max-marginal. 在clique tree中,每个clique的belief和max-marginal是一样的。
Max-sum中clique tree的calibration特性是:2个belief中对应变量的max结果一样。
和sum-product类似,如果clique i收到了除clique j以外的其它相邻clique节点的message,则从I passing到j的message不会再变化了。由此可知,来自叶节点的message将不再变化。在max-sum中采用单一的up-down message传播时最终也会收敛(calibration)。
即使MAP assignment答案不唯一,也可以从calibration clique tree中decoding出一个MAP assignment来。
有些MAP问题不可解,有些可解。如果对应的树的width越小,则该问题越可能有解。
一些match问题可以转换成MAP问题,而某些MAP问题可以转换为graph cut.
Cardinality Factors,Sparse Pattern Factors,Convexity Factors常用于一些MAP问题的求解。
参考资料:
Daphne Koller,Probabilistic Graphical Models Principles and Techniques书籍第3、4、5、6、9、10、13章
coursera课程:Probabilistic Graphical Models
网友demonstrate 的 blog:PGM 读书笔记节选(一)到(十)

 浙公网安备 33010602011771号
浙公网安备 33010602011771号