
基于迅为RK3588开发板实现高性能机器狗主控解决方案- AI能力实战:YOLOv5目标检测例程
本文旨在分享一种基于迅为RK3588开发板的低成本、高性能、全开源的机器狗主控解决方案。该方案充分利用了RK3588强大的算力、丰富的接口和出色的AI能力,为机器人爱好者、高校科研团队及企业提供了一个绝佳的快速开发平台。
一、 引言:为何选择迅为RK3588?
机器狗作为腿式机器人的典型代表,对主控器的计算性能、实时性、接口丰富度和功耗提出了极高要求。
迅为RK3588开发板 以其卓越的性能,成为了解决这些问题的理想选择:
· 强大算力:RK3588采用四核A76+四核A55 CPU,以及ARM G610MP4 GPU,为复杂的运动学解算、环境感知和决策规划提供充沛的通用算力。
· AI性能:内置6TOPS算力的NPU,可高效运行YOLO等视觉模型,实现实时目标跟踪、姿态识别与语义SLAM。
· 极致接口扩展性:PCIe接口、多个USB3.0/2.0、双千兆网口、丰富的SPI/I2C/UART,可轻松连接激光雷达、IMU、深度相机、多个舵机/电机驱动器等外设。
· 多屏异显:支持多显示屏输出,便于本地调试、状态监控与远程控制。
· 成熟的生态:迅为提供了完善的Linux(Ubuntu、Debian)和Android系统支持,降低了底层开发的难度。
二、 系统硬件架构
关键硬件选型建议:
· 主控: 迅为RK3588开发板(核心板+底板)。
· 执行器: 数字舵机(如Dynamixel)或带编码器的无刷电机,具体取决于机器狗的负载和精度要求。
· 传感器:
· 视觉: Intel Realsense D435i/D455(RGB-D相机,提供颜色和深度信息)。
· 感知: 2D/3D激光雷达(如思岚A1或速腾聚创的3D雷达),用于建图和避障。
· 姿态: 高性能IMU(如MPU6050/9250,BMI088),用于状态估计。
· 通信: 4G/5G模块(通过PCIe接口)或Wi-Fi 6模块,实现远程遥控和视频回传。
· 电源: 大容量锂电池(如6S LiPo)配合高效的DC-DC降压模块,为整个系统提供稳定供电。
三、 软件与算法栈
软件系统采用经典的机器人分层架构,在迅为RK3588的Ubuntu系统上运行。
1. 操作系统层
· 迅为提供的Ubuntu 20.04/22.04: 作为基础操作系统,稳定且社区支持完善。
迅为RK3588开发板为机器狗乃至更复杂的移动机器人领域注入了一股新的活力。它成功地打破了高性能与高成本之间的壁垒,使得更多团队和个人能够参与到前沿机器人技术的研发中。
迅为iTOP-RK3588开发板不仅可用于科研和教育,在安防巡检、灾难救援、娱乐陪伴等场景也拥有巨大的应用潜力。
四、 AI能力实战:YOLOv5目标检测例程
为展示RK3588 NPU的强大AI算力,迅为开发板提供了开箱即用的YOLOv5例程。
部署与测试步骤如下:
1. 获取例程: 编译好的 yolov5 例程已经放在了“iTOP-3588 开发板\02_【iTOP-RK3588 开发板】开发资料
\15_NPU 例程测试配套资料\08_rknn_model_zoo 测试\12_yolov5”目录下,如下图所示:

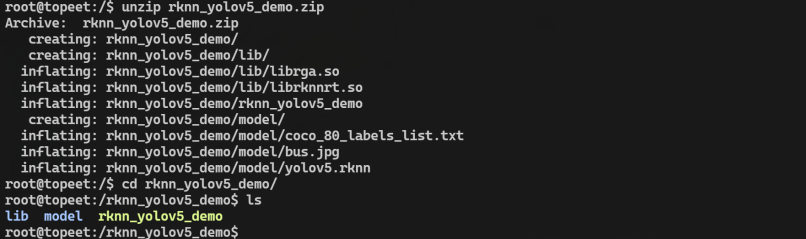
2. 部署到开发板: 将该文件拷贝到开发板上,并解压,解压完成如下图所示:
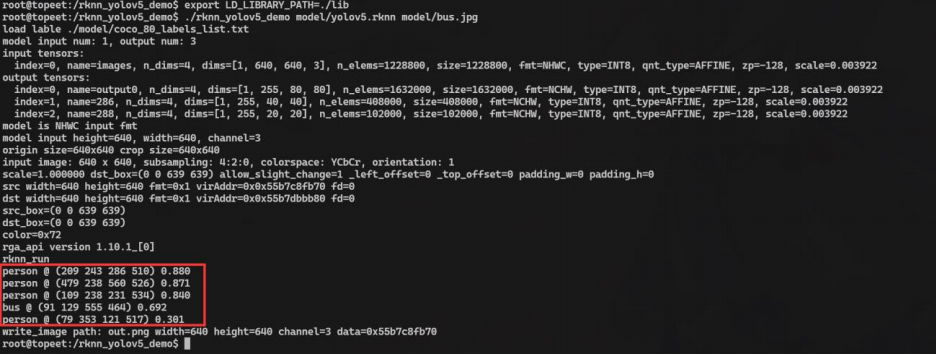
3. 执行推理: 然后进入该文件夹,使用以下命令运行可执行文件,实现图片的位置和种类识别,如下图
所示:
export LD_LIBRARY_PATH=./lib
./rknn_yolov5_demo model/yolov5.rknn model/bus.jpg
4. 查看结果:最后会在当前目录下生成推理完成的图片,如下图所示:

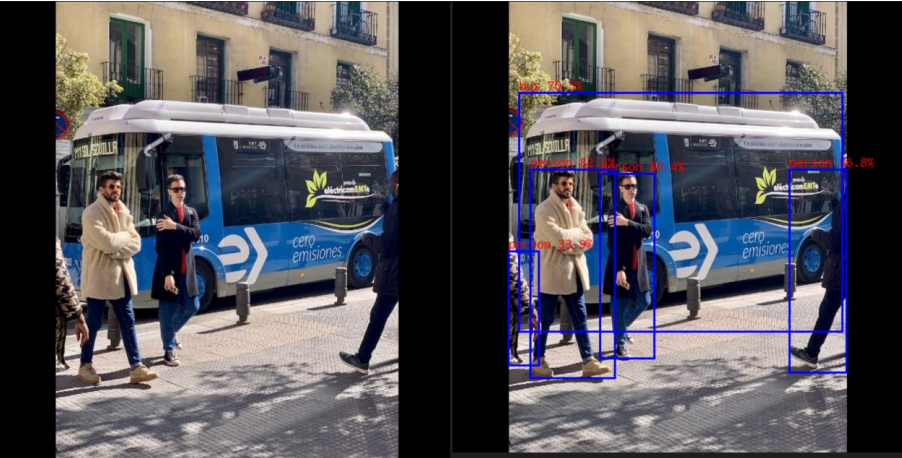
可以看到不同的人以及公交车就被识别了出来,证明模型推理成功。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号