

Chapter 1
复指数的性质
\(e^{j\theta}=cos\theta+jsin\theta\)
由此推出 \(cos\theta\) 是复数的实部,\(sin\theta\) 是指数的虚部,且对于任何模数为 \(1\) 的复数,
函数的拆分
任何函数都可以被唯一的拆分成一个奇函数和一个偶函数,即
假设有多种被拆分的形式,即 \(x(t)=f_1+g_1=f_2+g_2\) (其中 \(f\) 为奇函数, \(g\) 为偶函数),
那么 \(f_1-f_2=g_2-g_1\)
由于 奇函数 - 奇函数 = 奇函数,等式两边奇偶性相同,则 \(f_1-f_2=g_2-g_1=0\)
含有复数的指数、三角函数
指数函数
即 \(x(t)=e^{j\omega_0 t}\)
周期性:
三角函数
由于 \(Ae^{j(\omega_0 t+\phi)}=Acos(\omega_0t+\phi)+Ajsin(\omega_0t+\phi)\) ,
\(Acos(\omega_0t+\phi)=\frac{A}{2}e^{j\phi}e^{j\omega_0t}+e^{-j\phi}e^{-j\omega_0t}\)
二者的周期是同步的
两种函数的能量
注意 \(e^{j\omega_0t}\) 是模长为 \(1\) 的复数,所以对于 \(e^{j\omega_0t}\) ,\(E_{period}=\int_0^{T_0}e^{j\omega_0t}dt=\int_0^{T_0}1dt=T_0\)
对于 \(Acos(\omega_0t+\phi)\) ,\(E_{period}=\int_0^{T_0}A^2cos^2(\omega_0t+\phi)dt\)
考虑 和差化积,\(cos^2\alpha=\frac{cos2\alpha + 1}{2}\)
\(E_{period}=\frac{A^2}{2}\int_0^{T_0}(1+cos(2\omega_0t+2\phi))dt=\frac{A^2}{2}T_0\)
指数函数产生的“谐波”
基波频率 \(\omega_0\) ,谐波频率是基波频率的 \(k\) 倍
震荡频率
对于指数函数和三角函数,当频率 \(\omega_0\) 从 \(0\) 到 \(\pi\) 震荡频率增大,从 \(\pi\) 到 \(2\pi\) 震荡频率减小
\(e.g. ~cos(\pi t)\) 的震荡频率大于 \(cos(\frac{3}{2}\pi t)\)
离散信号的周期性
对于连续信号来说,函数 \(e^{j\omega_0 t}\) 或 \(cos(\omega_0t+\phi)\) 的周期就是 \(\frac{2\pi}{\omega_0}\) ,而对于离散信号来说不一定是这样,举个例子:
对于连续信号 \(x(t)=cos(\frac{4\pi t}{3})\) 来说,它的周期是 \(\frac{3}{2}\) ,
而对于离散信号来说, \(\frac{3}{2}\) 并不是信号上的点, \(x[n]\) 的周期是 \(N=m\frac{2\pi}{4\pi/3}的最小整数=3\)
离散信号的周期必须是整数,因此需要满足
脉冲信号与阶跃信号
离散信号
单位脉冲信号 \(\delta[n]=\left\{ \begin{matrix} 0,n\ne 0 \\ 1,n=0 \end{matrix} \right.\) ,单位阶跃信号 \(u[n]=\left\{ \begin{matrix} 0,n< 0 \\ 1,n\geq 0 \end{matrix} \right.\)
有如下性质:
对于任意离散信号 \(x[n]\) ,有:
连续信号
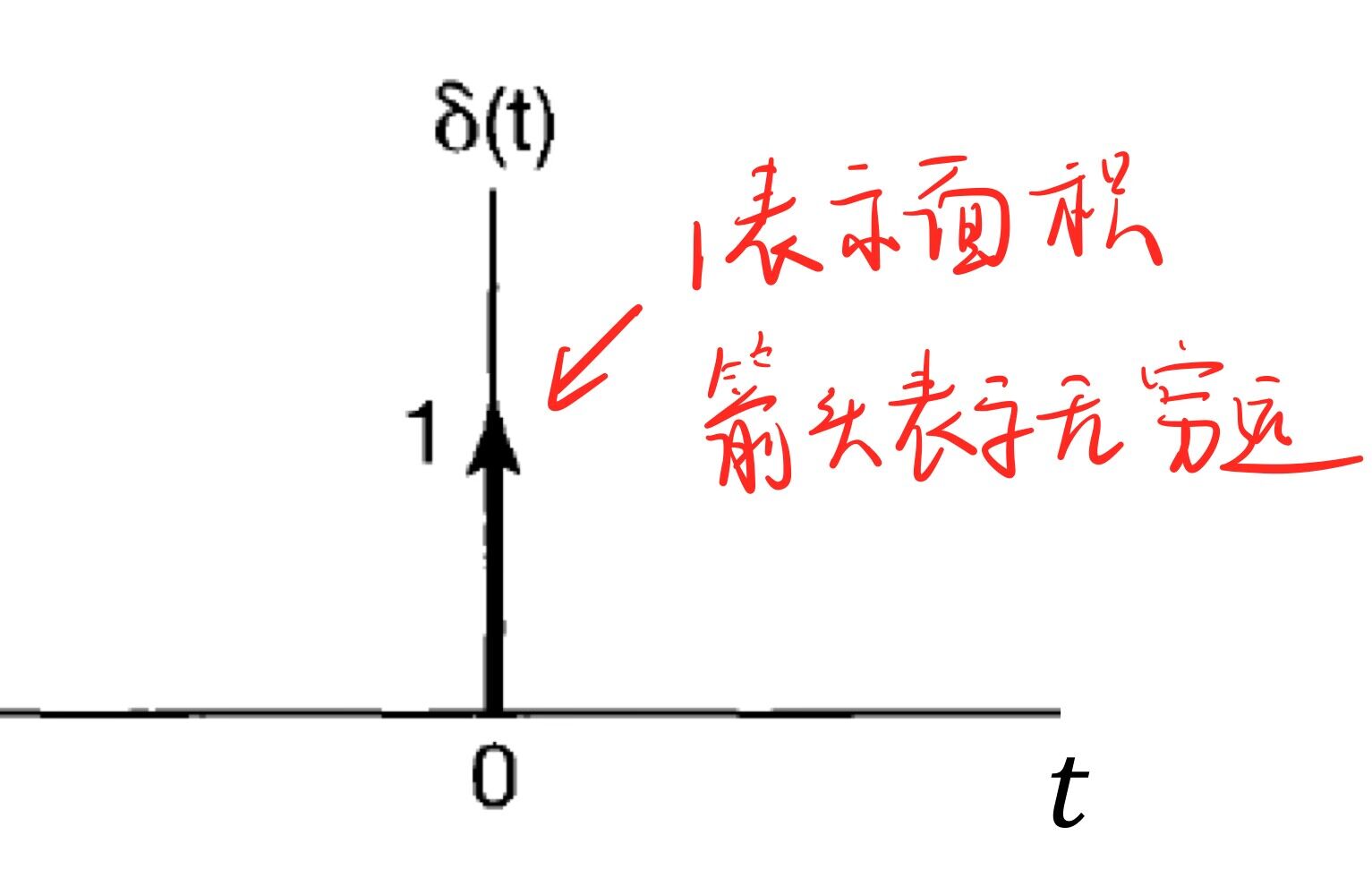
单位阶跃信号 \(u(t)=\left\{ \begin{matrix} 0,t< 0 \\ 1,t> 0 \end{matrix} \right.\)
注意箭头表示无穷远,箭头的面积是 \(1\)
用脉冲信号和阶跃信号表示任意离散信号
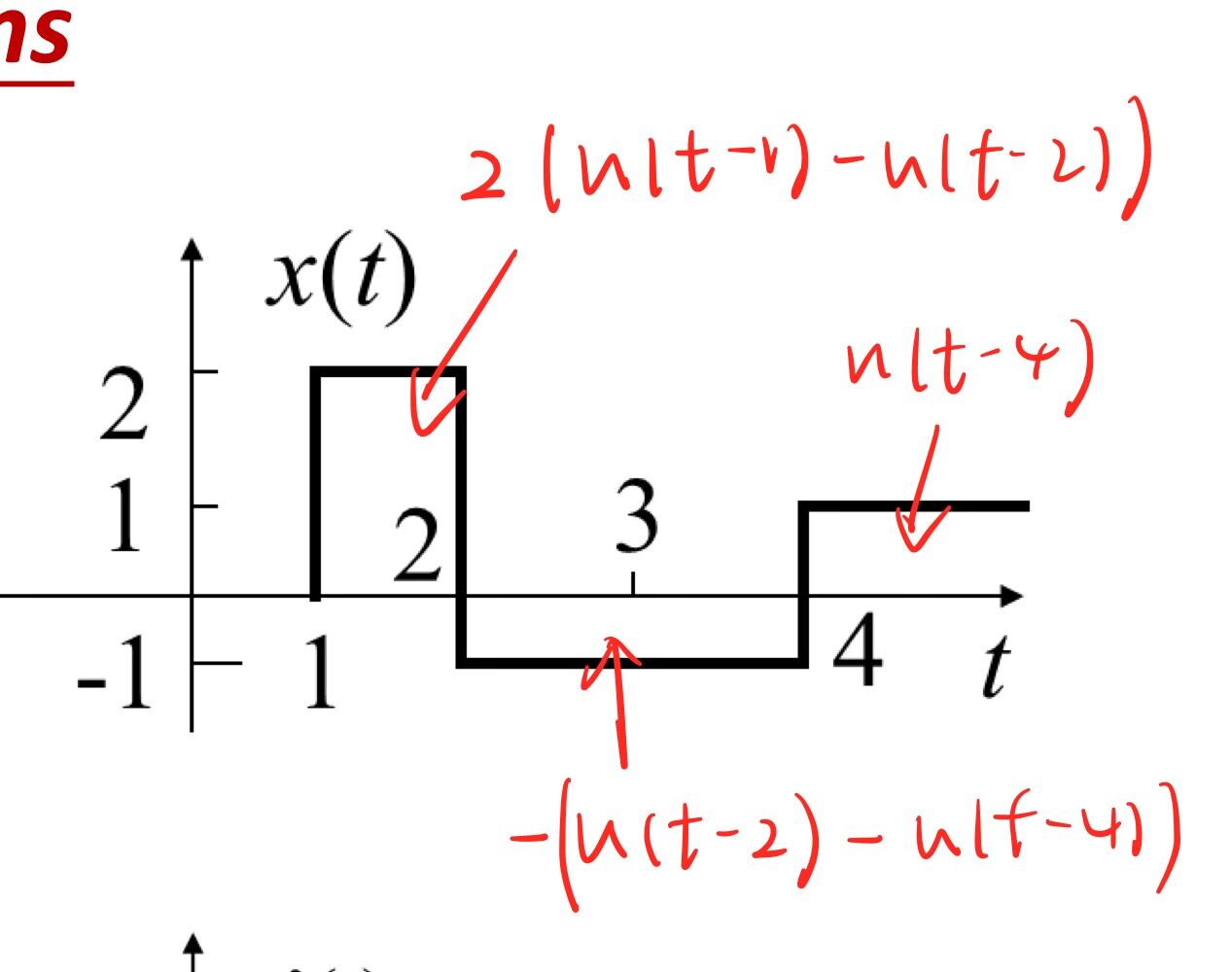
如图,\(x(t)=2u(t-1)-3u(t-2)+2u(t-4)\)
\(x'(t)=2\delta(t-1)-3\delta(t-2)+2\delta(t-4)\)
系统的基本性质
需要/不需要存储 (with/without memory)
只与当前时间有关,则不需要存储;否则需要存储
可逆性 (invertibility)
系统的 \(input\) 对 \(output\) 构成一个单射
因果性 (causality)
系统的 \(output\) 只与之前的时间值有关:
\(e.g.~y[n]=\sum\limits_{k=-\infty}^{n} x[k]\)
我的理解:如果出现该时间后的值,如 \(y[n]=x[n]-x[n+1]\) 。那么考虑如果 \(x[n]=y[n-1]\) ,那就寄了
相应的,如果是 \(y(t)=x(t)cos(t+1)\) 这种系统,就不会出现我理解的那种情况,那么是稳定的,也就属于因果系统了
稳定性 (stability)
有限的输入值得到有限的输出值
\(\underset{n\rightarrow \infty}{lim} x[n] \stackrel{LTI}{\rightarrow} y[n]\) ,则 \(y[n]\) 是有界的
时不变性 (time invariance)
如果系统 \(x[n] \stackrel{LTI}{\rightarrow} y[n]\) 满足时不变性,那么 \(x[n-n_0] \stackrel{LTI}{\rightarrow} y[n-n_0]\)
如果有和时间相关的系数,如 \(y[n]=(n-1)x[n]\) 那么时间轴发生变换肯定就不行了;
对于时间上的变化,时不变系统必须要求时间的线性性,不能存在翻转、放缩等等情况;
也就是说若 \(y[n]=kx[ax+b]\) ,那么 \(k\) 必须为常数,\(a\) 必须等于 \(1\)
线性性 (linearity)
如果系统1 \(x[n] \stackrel{LTI}{\rightarrow} y[n]\) 符合线性性,那么 \(ax_1[n] + bx_2[n] \stackrel{LTI}{\rightarrow} ay_1[n] + by_2[n]\)
用线性代数的思维想,符合线性变换(具有转换矩阵 \(\mathbb T\) )的信号就具有线性性,如果出现常数项或大于一次的项,那么自然是不符合线性性的。
总结
| 性质 | 描述 | 符合的例子 | 不符合的例子 |
|---|---|---|---|
| 存储性 (memoryless) | 是否只与当前时刻有关 | \(y[n]=nx[n]\) | \(y[n]=x[n]+x[n-1]\) |
| 可逆性 (invertibility) | 是否能通过某种系统使得 \(y[n]\) 变回 \(x[n]\) | \(y[n]=\sum\limits_{k=-\infty}^{n} x[n]\) | \(y(t)=x^2(t)\) 或 \(y(t)=2x(t)+3\) |
| 因果性 (causality) | 任意时间点的 \(y[n]\) 只与之前的时间值有关 | \(y[n]=\sum\limits_{k=-\infty}^{n} x[n]\) | \(y[n]=x[n]-x[n+1]\) |
| 稳定性 (stability) | 有限的输入得到有限的输出 | \(y(t)=x^2(t)\) | \(y[n]=\sum\limits_{k=-\infty}^{n} u[n]\) |
| 时不变性 (time invariance) | 时间轴移动后输出不变 | \(y[n]=sin(x[n])\) | \(y[n]=nx[n]\) 或 \(y[n]=x[-n]\) |
| 线性性 (linearity) | 符合线性变换的系统 | \(y[n]=\sum\limits_{k=-\infty}^{n} x[n]\) | \(y[n]=sin(x[n])\) |

 浙公网安备 33010602011771号
浙公网安备 33010602011771号