

2024年ESWA SCI1区TOP,大规模移动用户移动边缘计算中多无人机部署与任务调度的联合优化方法,深度解析+性能实测 - 教程
2025-11-16 17:28 tlnshuju 阅读(15) 评论(0) 收藏 举报
1.摘要
在多无人机辅助移动边缘计算(MEC)领域,无人机部署与任务调度的联合优化已成为在保障移动用户服务质量的同时降低系统能耗的高效手段。然而,该方案实施过程中面临无人机部署与任务调度复杂耦合关系的严峻挑战,为此,本文提出了遗传模拟退火与知识共享双阶段混合策略算法(DSHSGSK),其采用HS-GSK交替优化策略,并引入淘汰算子,以实现无人机部署与任务调度的同步优化。为提升无人机部署效率并构建更奏效的任务调度策略,论文创新性地设计了无人机位置编码方案。为融合和声搜索算法的局部搜索能力与基于知识获取共享算法的全局搜索优势,通过引入协调参数调控两种优化技术的交替频率。
2.系统模型
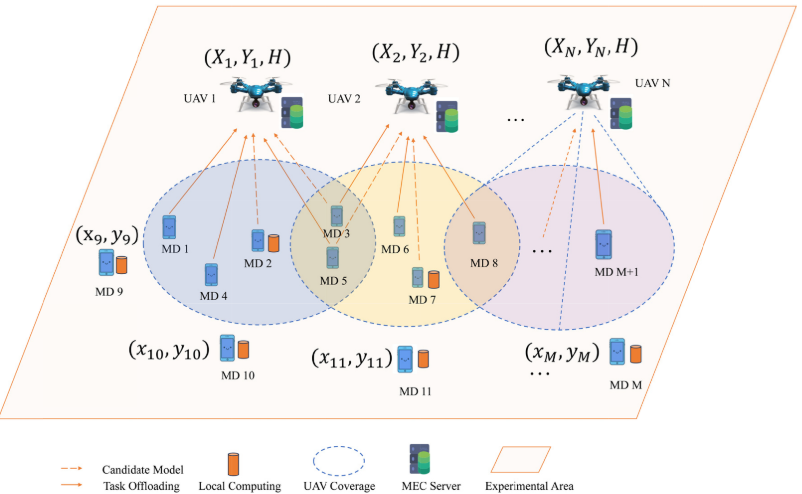
系统模型包括M MM个移动用户与N NN架服务无人机。用户生成计算任务T i = ( c i , d i ) T_i = (c_i, d_i)Ti=(ci,di),无人机则作为动态的移动边缘节点。核心问题在于决策每个任务应本地执行还是卸载至特定无人机k kk执行,并分配相应的计算资源f i , k f_{i,k}fi,k。无人机的部署位置( X j , Y j , H ) (X_j, Y_j, H)(Xj,Yj,H)是影响系统效能的关键优化变量。
通信模型
当卸载决策a i , 1 = 1 a_{i,1}=1ai,1=1时,任务U i U_iUi将被传输至无人机边缘服务器处理,结束后结果经下行链路返回。其上行传输速率可表示为
r i , k = W l o g 2 ( 1 + p α 0 g 0 ω B θ 2 ( H 2 + ( D i , j M U ) 2 ) ) ∀ j ∈ N , i ∈ M , k = j r_{i,k}=W\mathrm{log}_2\left(1+\frac{\mathrm{p}\alpha_0\mathrm{g}_0}{\omega B\theta^2\left(H^2+\left(D_{i,j}^{MU}\right)^2\right)}\right)\forall j\in\mathscr{N},i\in\mathscr{M},\mathrm{k}=\mathrm{j}ri,k=Wlog21+ωBθ2(H2+(Di,jMU)2)pα0g0∀j∈N,i∈M,k=j
计算模型
当对任务U i U_iUi做出卸载决策a i 0 = 1 a_{i0} = 1ai0=1时,本地执行任务所消耗的能量表示为:
e i , 0 l o c = μ 1 ( f i , 0 ) φ − 1 c i ∀ i ∈ M e_{i,0}^{loc}=\mu_1\left(f_{i,0}\right)^{\varphi-1}c_i\mathrm{~}\forall i\in Mei,0loc=μ1(fi,0)φ−1ci∀i∈M
边缘计算模型
由于移动设备的计算能力有限,计算任务将被卸载到边缘服务器执行,当任务U i U_iUi在边缘服务器上执行时,消耗的能量可以表示为:
e i , k m = P i , k d i R i , k + μ 2 ( f i , k ) φ − 1 c i , ∀ i ∈ M , k = j e_{i,k}^m=P_{i,k}\frac{d_i}{R_{i,k}}+\mu_2\left(f_{i,k}\right)^{\varphi-1}c_i,\forall i\in M,k=jei,km=Pi,kRi,kdi+μ2(fi,k)φ−1ci,∀i∈M,k=j
为在确保所有任务完成的前提下最小化系统总能耗,论文将无人机部署与任务调度的联合优化挑战,建模为一个目标函数P PP:
min N , X j , Y j , a i , k , f i , k ∑ m = 1 M ( a i , k e i , 0 l o c + ∑ k = 1 N a i , k e i , k M ) + β N e h \min_{N,X_{j},Y_{j},a_{i,k},f_{i,k}}\sum_{m=1}^{M}\left(a_{i,k}e_{i,0}^{loc}+\sum_{k=1}^{N}a_{i,k}e_{i,k}^{M}\right)+\beta Ne^{h}N,Xj,Yj,ai,k,fi,kminm=1∑M(ai,kei,0loc+k=1∑Nai,kei,kM)+βNeh
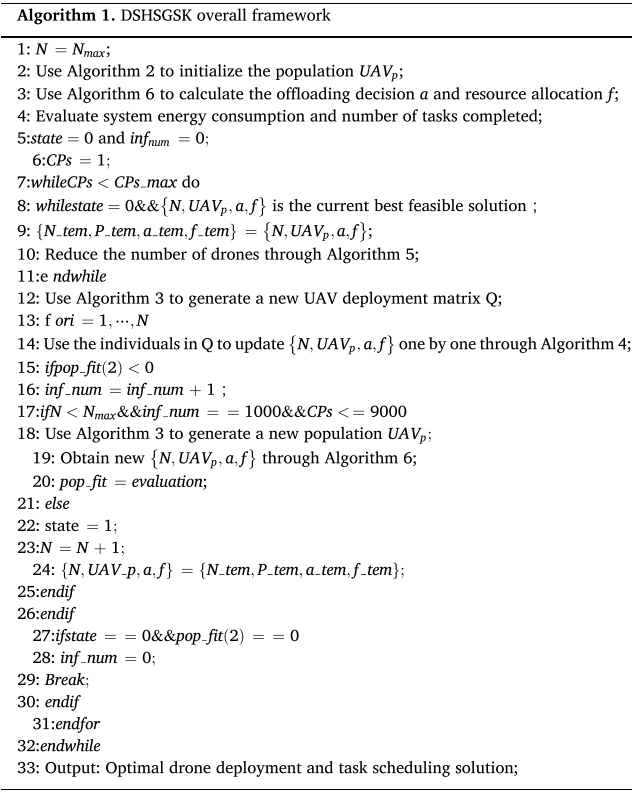
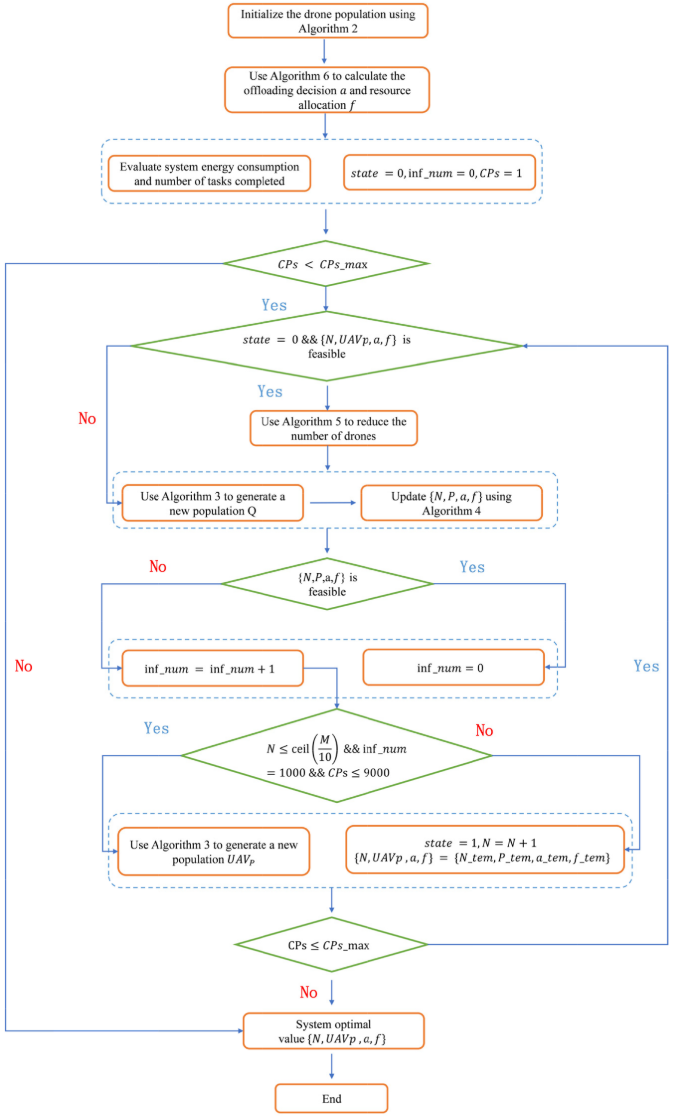
3.提出算法
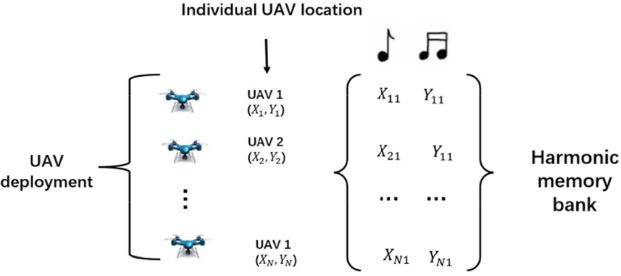
针对多无人机部署与任务调度的变长优化难题,DSHSGSK算法创新性地采用固定长度编码方案,将无人机位置坐标编码存储于和声记忆库,从而将问题转化为定长优化。该算法利用淘汰算子动态优化无人机数量,并通过更新算子调整无人机位置,二者由状态变量state智能切换,在确保任务完成的前提下,协同实现平台能耗最小化的目标。
初始化
依次为每架无人机随机生成位置,并确保满足互不碰撞的约束条件(C2)。若连续失败次数达到上限,则整体重新初始化,直至产生一个满足所有约束的完整部署。
无人机部署优化
HS-GSK混合算子通过交替执行局部搜索与全局搜索以优化无人机部署与任务调度。开始利用HS算法进行局部优化;当搜索陷入局部最优时,则切换至GSK算法进行全局优化,以此跳出局部最优陷阱。
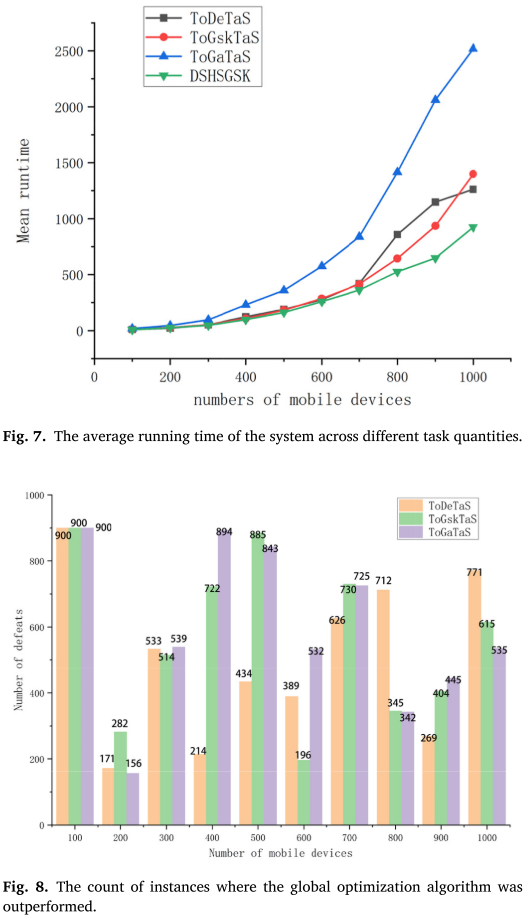
4.结果展示
5.参考文献
[1] Ouyang H, Liang L, Li S, et al. A joint optimization method for multi-UAV deployment and task scheduling in mobile edge computing with large-scale mobile users[J]. Expert Systems with Applications, 2024, 255: 124526.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx

 浙公网安备 33010602011771号
浙公网安备 33010602011771号