

CPP中CAS std::chrono 信号量与Any类的手动达成
2025-10-05 12:14 tlnshuju 阅读(12) 评论(0) 收藏 举报前言
CAS(Compare and Swap) 是一种用于多线程同步的原子指令。它通过比较和交换操作来确保数据的一致性和线程安全性。CAS操作涉及三个操作数:内存位置V、预期值E和新值U。当且仅当内存位置V的值与预期值E相等时,CAS才会将内存位置V的值更新为新值U
C++中的CAS实现
在C++中,CAS操作可以通过std::atomic库中的compare_exchange_weak和compare_exchange_strong方法实现。这两个方法都用于比较和交换原子对象的值,但它们在失败时的行为有所不同
顺带提一下标准库实现的延时操作std::chrono
1.原子操作
我们平时直接进行的数据修改一般都是非原子操作,如果多个线程同时以非原子操作的方式修改同一个对象可能会发生数据争用,从而导致未定义行为;而原子操作能够保证多个线程顺序访问,不会导致数据争用,其执行时没有任何其它线程能够修改相同的原子对象。C++中可以使用std::atomic来定义原子变量。
CAS
常见计数器用法:
std::atomic<
int>
counter(0
)
;
// 线程1增加计数器
counter.fetch_add(1
)
;
// 线程2减少计数器
counter.fetch_sub(1
)
;常见控制标志用法:
std::atomic<
bool>
flag(true
)
;
// 线程1检查标志
if (flag.load(
)
) {
// 执行操作
}
// 线程2修改标志
flag.store(false
)
;复杂数据类型用法:
#
include <atomic>
#
include <iostream>
#
include <type_traits>
// 自定义类型 Point
struct Point {
int x;
int y;
// 默认构造函数
Point(
) : x(0
)
, y(0
) {
}
// 自定义构造函数
Point(
int x,
int y) : x(x)
, y(y) {
}
// 拷贝构造函数和拷贝赋值运算符
Point(
const Point&
) =
default
;
Point&
operator=(
const Point&
) =
default
;
// 析构函数
~Point(
) =
default
;
}
;
int main(
) {
static_assert(std::is_trivially_copyable<Point>
::value, "Point must be trivially copyable"
)
;
std::atomic<Point> atomic_point;
Point p1(1
, 2
)
;
atomic_point.store(p1)
;
Point p2 = atomic_point.load(
)
;
std::cout <<
"Atomic Point: (" << p2.x <<
", " << p2.y <<
")" << std::endl;
return 0
;
}2. std::chrono
std::chrono是C++11引入的一个全新的有关时间处理的库。
新标准以前的C++往往会使用定义在ctime头文件中的C-Style时间库std::time。
相较于旧的库,std::chrono完善地定义了时间段(duration)、时钟(clock)和时间点(time point)三个概念,并且给出了对多种时间单位的支持,提供了更高的计时精度、更友好的单位处理以及更方便的算术操作(以及更好的类型安全)。
下面,我们将逐步说明std::chrono用法。
chrono库概念与相关用法
时间段(duration)
时间段被定义为std::chrono::duration,表示一段时间。
它的签名如下:
template<
class Rep
,
class Period = std::ratio<
1>
>
class duration
;Rep是一个算术类型,表示tick数的类型,笔者一般会将其定义为int或者long long等整数类型,当然浮点数类型也是可行的。
Period代表tick的计数周期,它具有一个默认值——以一秒为周期,即 1 tick/s 。单位需要自行指定的情况会在后面涉及,这里暂时不讨论。
简单来说,我们可以认为一个未指定Period的duration是一个以秒为单位的时间段。
一个简单的例子:
#
include <chrono>
#
include <thread>
#
include <iostream>
int main(
)
{
std::chrono::duration<
int>
dur(2
)
;
std::cout << std::chrono::time_point_cast<std::chrono::seconds>
(std::chrono::steady_clock::now(
)
)
.time_since_epoch(
).count(
) << std::endl;
// 以秒为单位输出当前时间
std::this_thread::sleep_for(dur)
;
std::cout << std::chrono::time_point_cast<std::chrono::seconds>
(std::chrono::steady_clock::now(
)
)
.time_since_epoch(
).count(
) << std::endl;
// 以秒为单位输出当前时间
return 0
;
}这段代码的作用是输出当前时间,随后睡眠两秒,再输出当前时间。dur描述了一个2秒的时间间隔。
duration支持几乎所有的算术运算。通俗地说,你可以对两个duration做加减运算,也可以对某个duration做数乘运算。
当然他也可以直接用于线程延时中
如下:
std::this_thread::sleep_for(std::chrono::seconds(2
)
)
;3.信号量
信号量的核心概念
头文件在C++20中是并发库技术规范(Technical Specification, TS)的一部分。信号量是同步原语,帮助控制多线程程序中对共享资源的访问。头文件提供了标准C++方式来使用信号量。
作用:
- 通过计数器限制对共享资源的并发访问数量。
- 实现线程间的同步(如生产者-消费者模型)。
类型:
- 计数信号量(std::counting_semaphore):允许指定资源的最大并发数。
- 二元信号量(std::binary_semaphore):计数为 1 的特殊信号量(类似于互斥锁)。
std提供的信号量如下:
#
include <semaphore.h>
// 用于读写线程之间的通信
sem_t rwsem;
// 初始化读写线程通信用的信号量
sem_init(&rwsem, 0
, 0
)
;
sem_wait(&rwsem)
;
// 等待信号量,子线程处理完注册消息会通知
sem_destroy(&rwsem)
;在非c++20的情况下使用信号量需要自己实现,实现如下:
信号量的简单实现与使用
Semaphore.h文件
//实现一个信号量类
class Semaphore
{
public:
Semaphore(
int limit = 0
)
:resLimit_(limit)
{
}
~Semaphore(
) =
default
;
//获取一个信号量资源
void wait(
)
{
std::unique_lock<std::mutex>
lock(mtx_)
;
//等待信号量有资源,没有资源的话,会阻塞当前线程
cond_.wait(lock, [&
](
)->
bool {
return resLimit_ >
0
;
}
)
;
resLimit_--
;
}
//增加一个信号量资源
void post(
)
{
std::unique_lock<std::mutex>
lock(mtx_)
;
resLimit_++
;
cond_.notify_all(
)
;
}
private:
int resLimit_;
std::mutex mtx_;
std::condition_variable cond_;
}
;显然上述cond_.wait(lock, [&]()->bool {return resLimit_ > 0; });
处的条件决定了是计数信号量还是二元信号量
Result.h文件
//实现接收提交到线程池的task任务执行完成后的返回值类型Result
class Result {
public:
Result(std::shared_ptr<Task> task,
bool isValid = true
)
;
~Result(
) =
default
;
//问题一:setva1方法,获取任务执行完的返回值的
void setVal(Any any)
;
//问题二:get方法,用户调用这个方法获取task的返回值
Any get(
)
;
private:
Any any_;
//存储任务的返回值
Semaphore sem_;
//线程通信信号量
std::shared_ptr<Task> task_;
//指向对应获取返回值的任务对象
std::atomic_bool isValid_;
//返回值是否有效
}
;Result.cpp文件
//Result方法的实现
Result::Result(std::shared_ptr<Task> task,
bool isValid)
:isValid_(isValid)
,task_(task)
{
task_->
setResult(
this
)
;
}
Any Result::get(
)//用户调用
{
if (!isValid_)
{
return ""
;
}
sem_.wait(
)
;
//task任务如果没有执行完,这里会阻塞用户的线程
return std::move(any_)
;
}
void Result::setVal(Any any)//谁调用呢
{
//存储task的返回值
this->any_ = std::move(any)
;
sem_.post(
)
;
//已经获取的任务的返回值,增加信号量资源
}4. Any类
C++17的三剑客分别是std::optional, std::any, std::vairant
4.1 Any类介绍
在日常编程中,我们可能会遇到这么一个场景:需要一个类型可以接收任意类型的变量,并且在需要使用该变量的时候还能恰当的进行转换。不难想到,C语言中的万能指针void可以满足我们上述的需求。但void的使用相对繁琐,且难免会涉及到大量的内存管理操作,这无疑加大了我们编程的复杂度。而在C++17中,any类的出现很好的解决了我们上述的问题。
std::any 是 C++17 引入的一个标准库类型,用于表示一个可以存储任意类型数据的容器。与 std::variant 不同,std::any 不限制存储的类型,因此它可以用来存储任意的对象。它的设计目标是提供一种简单的方式来存储和检索任意类型的值,而不需要像 void* 那样手动管理类型信息。
std::any 的基本特性
任意类型的存储:std::any 可以存储任何可拷贝构造的类型。
类型安全:std::any 提供了类型安全的访问,确保在访问值时不会发生类型错误。
动态类型:std::any 可以在运行时存储不同类型的对象,而无需在编译时指定类型。
下面是手动实现的简陋版Any类
//Any类型:可以接收任意数据的类型
class Any
{
public:
Any(
) =
default
;
~Any(
) =
default
;
Any(
const Any&
) =
delete
;
Any&
operator=(
const Any&
) =
delete
;
Any(Any&&
) =
default
;
Any&
operator=(Any&&
) =
default
;
template<
typename T>
Any(T data) :base_(std::make_unique<Derive<T>>(data)
)
{
}
//这个方法能把any对象中存的数据提取出来
template<
typename T>
//T:int Derive<int>
T cast_(
)
{
//我们怎么从base_中找到它所指向的Derive对象,从他里面取出data对象
//基类指针=》派生类指针 RTTI
Derive<T>
* pd = dynamic_cast<Derive<T>>(base_.get(
)
;
//使用智能指针的get方法获取裸指针
if (pd ==
nullptr
)
{
throw "type is unmatch!"
;
}
return pd->data_;
}
private:
//基类类型
class Base
{
public:
virtual ~Base(
) =
default
;
}
;
//派生类类型
template<
typename T>
class Derive :public Base
{
public:
Derive(T data) : data_(data)
{
}
T data_;
//保存了任意的其他类型
}
;
private:
//定义一个基类的指针
std::unique_ptr<Base> base_;
}
;4.2 Any类实现细节分析
4.2.1 基类取用派生类成员
首先明确一点,在C++中,基类指针不能直接访问其所指向派生类的特有成员,这是面向对象编程中类型安全的重要规则。
所以在要取用所存储数据时需要对base_指针进行向下转型Derive<T>* pd = dynamic_cast<Derive<T>>(base_.get();
当然也可以使用另一种方法,即借用虚函数
class Base {
public:
virtual
void execute(
) = 0
;
// 纯虚函数接口
}
;
class Derived : public Base {
public:
void execute(
)
override {
special(
)
;
// 通过多态间接调用
}
void special(
) {
} // 派生类实现
}
;
Base* ptr =
new Derived(
)
;
ptr->
execute(
)
;
// 实际调用Derived::execute()4.2.2 隐式模板构造函数
使用隐式模板构造函数来免去指明数据类型
template<
typename T>
Any(T data) : base_(std::make_unique<Derive<T>>(data)
) {
}构造函数是模板函数,能根据传入的data自动推导类型T
例如 Any a(10); 编译器自动推导 T = int
4.2.3 类型擦除设计
类型擦除(Type Erasure)是一种设计模式,用来隐藏对象的具体类型,统一暴露抽象接口,提供“运行时多态”。
通过基类指针 unique_ptr 指向模板派生类 Derive
基类 Base 不含类型信息,实现类型擦除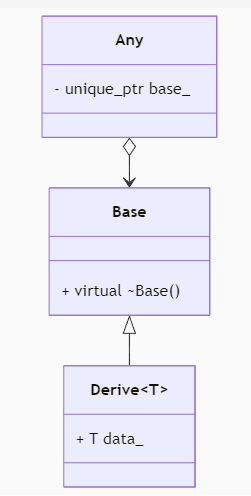
4.2.4 派生类模板封装
template<
typename T>
class Derive : public Base {
T data_;
// 实际存储的数据
}
;每个不同类型的数据都会被封装到独立的 Derive<T> 中
用户无需感知具体存储类型
4.2.5 提取数据时需要指定类型的原因
//这个方法能把any对象中存的数据提取出来
template<
typename T>
//T:int Derive<int>
T cast_(
)
{
//我们怎么从base_中找到它所指向的Derive对象,从他里面取出data对象
//基类指针=》派生类指针 RTTI
Derive<T>
* pd = dynamic_cast<Derive<T>>(base_.get(
)
;
//使用智能指针的get方法获取裸指针
if (pd ==
nullptr
)
{
throw "type is unmatch!"
;
}
return pd->data_;
}Any test(10
)
;
test.cast_<
int>(
)
;类型安全恢复
- 必须通过
dynamic_cast尝试将基类指针转为具体的Derive<T>* - 需要明确的模板参数
T来恢复原始类型
运行时类型检查
- 如果实际存储类型与请求类型不匹配:
Any a(std::string("test" ) ) ; a.cast_< int>( ) ; // 抛出异常 dynamic_cast失败返回nullptr触发异常
关键技术亮点
RAII资源管理
使用
unique_ptr自动管理派生类对象生命周期默认移动操作支持容器存储:
std::vector<Any> vec; vec.push_back(Any(42 ) ) ; // 存int vec.push_back(Any("hello" ) ) ; // 存const char*
类型安全边界
- 构造时隐式类型推导(安全)
- 提取时显式类型声明(安全)
- 运行时验证类型匹配(安全)
禁止拷贝的合理性
Any(const Any&) = delete;- 避免浅拷贝问题(派生类对象不可复制)
- 移动操作保留以支持高效转移资源
这种模式实现了 “动态类型安全容器”:
- 存数据:利用模板构造函数+类型擦除 → 静态多态
- 取数据:通过dynamic_cast+RTTI → 动态类型检查
- 完美平衡了灵活性与安全性

 浙公网安备 33010602011771号
浙公网安备 33010602011771号