1. Vector Add
本篇讲述如何使用CUDA编程并行计算两个向量的加法。
并行结构
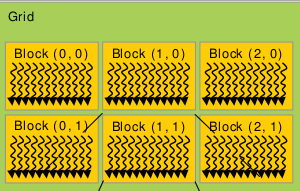
这是CUDA编程的并行结构。
Grid是最高层级的单位,由多个Block(线程块)组成;
每个Block由许多Thread(线程)组成,同一个Grid内的所有Block共享相同的全局内存空间;
而Thread是CUDA编程中最小的执行单元。
由此可见,一个Grid与传统的进程的概念有所相似(进程内资源共享),而类似的,Block与Thread都对应传统的线程,但CUDA编程中的Thread是最小的执行单元,更加轻量级。
| CUDA 概念 | 传统概念 | 相似点 | 关键区别 |
|---|---|---|---|
| Grid | Process | 都表示一个独立的计算任务 | Grid 是 GPU 上的任务,依赖主机进程;Process 是操作系统中的独立实体 |
| Block | Thread | 都表示并行执行单元 | Block 是 GPU 上的线程组,共享快速内存;Thread 是 CPU 上的执行单元 |
| Thread | Thread | 都执行代码逻辑 | CUDA 线程是轻量级的(由 GPU 硬件调度);传统线程由操作系统调度 |
回过头看核函数的调用,我们提到调用核函数时需要使用func<<<X, Y>>>()的语法,实际上这里的X指定的是每个Grid的维度,即每个Grid内Block是如何分布的,Y指定的是每个Block的维度,即每个Block内Thread是如何分布的。
注意<<<X, Y>>>不能指定Grid的数量。
X和Y可以是整型或dim3。
#include <iostream>
__device__ int cnt1 = 0, cnt2 = 0; // GPU上的全局变量
__global__ void kernal(int type) {
if (type == 0) {
printf("int parameter <<<2, 1>>>, grid.shape=(2,), block.shape(1,)\tcnt1=%d\n", ++cnt1);
}
else {
printf("dim3 parameter <<<dim3(2, 2), dim3(3, 3)>>>, grid.shape=(2, 2),"
"block.shape=(3, 3)\tcnt2=%d\n", ++cnt2);
}
}
/*
__global__ void kernal(int type, int& cnt, const char* str) {
printf("%s\tcnt%d=%d\n", str, type + 1, ++cnt);
}
*/
int main() {
kernal<<<2, 1>>>(0);
dim3 gridshape(2, 2);
dim3 blockshape(3, 3);
kernal<<<gridshape, blockshape>>>(1);
cudaDeviceSynchronize();
return 0;
}
我们之后会继续拿该程序来作为例子。这里不展示程序输出,建议自己运行一下。
这里先看一下这里展示的两种核函数调用方式,一种直接用整型参数设置一维的Grid和Block,也可以用dim3结构体设置一维、二维或三维的Grid和Block,代码中展示的是二维,一维和三维也是类似的,例如dim3(5)、dim3(3, 2, 4)。
代码中涉及的其他问题暂时保留。
内存分配
如何在GPU上动态分配内存?
cudaError_t cudaMalloc(void **devPtr, size_t size);
cudaMalloc()函数用于在GPU上开辟一段内存空间。简单看一下形参,devPtr是一个二级指针,这样可以修改传入的实参指针,使其指向开辟的显存空间,size自然是数组大小。
如何把CPU端的数组复制到GPU内存中去?
cudaError_t cudaMemcpy(void* dst, const void* src, size_t count, cudaMemcpyKind kind);
dst和src常识,前者目的(destination)地址,后者源(source)地址,count即size。
kind为复制方向,cudaMemcpyKind是一个枚举类型,主要包含以下五种取值:
| 取值 | 含义 | 源地址类型 | 目标地址类型 |
|---|---|---|---|
| cudaMemcpyHostToDevice | 从主机(CPU)到设备(GPU) | 主机指针 | 设备指针 |
| cudaMemcpyDeviceToHost | 从设备(GPU)到主机(CPU) | 设备指针 | 主机指针 |
| cudaMemcpyDeviceToDevice | 设备到设备(GPU 内部或多 GPU 之间) | 设备指针 | 设备指针 |
| cudaMemcpyHostToHost | 主机到主机(CPU 内部) | 主机指针 | 主机指针 |
| cudaMemcpyDefault | 统一内存(Unified Memory)模式下的自动检测方向 | 统一内存指针 | 统一内存指针 |
我们想把CPU端的数组复制到GPU端,就用cudaMemcpyHostToDevice。
另外注意cudaMalloc的devPtr是二级指针,因此需要传入指针的地址,而cudaMemcpy的dst和src是一级指针,传入指针的值(指向的地址)即可。
向量加法
#include <iostream>
#include <cuda_runtime.h>
#include <numeric>
__device__ int deviceArr1[100]; // GPU上的静态全局数组
__global__ void kernal(int* deviceArr2, int size) {
int idx = threadIdx.x + blockIdx.x * blockDim.x;
if (idx < size)
deviceArr1[idx] += deviceArr2[idx];
}
__global__ void init(int size) {
for (int i = 0; i < size; ++i) {
deviceArr1[i] = size - i;
}
}
__global__ void display(int* deviceArr2, int size) {
printf("deviceArr1\n");
for (int i = 0; i < size; ++i) {
printf("%-3d ", deviceArr1[i]);
if (i % 10 == 9) printf("\n");
}
printf("deviceArr2\n");
for (int i = 0; i < size; ++i) {
printf("%-3d ", deviceArr2[i]);
if (i % 10 == 9) printf("\n");
}
}
int main() {
const int N = 100;
int *deviceArr2; // GPU上的动态全局数组
int hostArr[N];
std::iota(hostArr, hostArr + N, 1);
cudaError_t err = cudaMalloc(&deviceArr2, 1000);
// 在GPU全局内存中动态分配一段内存空间
if (err != cudaSuccess) {
// 后面为了方便 不再做检查
printf("Failed: %s\n", cudaGetErrorString(err));
return 1;
}
init<<<1, 1>>>(N); // 不能直接在主机端操作GPU的内存(主机端需要通过CUDA API)
cudaDeviceSynchronize();
cudaMemcpy(deviceArr2, hostArr, sizeof(hostArr), cudaMemcpyHostToDevice);
// 这里选择用一个线程处理一个数组元素的映射方式 因此总线程数要>=数组元素数
// 换句话说 需要有一个映射的方式决定每个线程处理哪些元素 这里直接用一个线程对应一个元素
int blockshape = 32;
int gridshape = (N - 1) / blockshape + 1;
// ceil(x / y) = floor((x - 1) / y) + 1 上取整保证总线程数>=数组元素数
kernal<<<gridshape, blockshape>>>(deviceArr2, N);
cudaDeviceSynchronize();
display<<<1, 1>>>(deviceArr2, N);
cudaDeviceSynchronize();
cudaFree(deviceArr2);
return 0;
}
\(deviceArr1 \leftarrow deviceArr1 + deviceArr2\),其中\(deviceArr1[i] = 100 - i\),使用静态数组;\(deviceArr2[i] = i + 1\),使用动态内存分配。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号