

2025年自动驾驶感知模块技术全景解析
2025年自动驾驶感知模块技术全景解析
——从硬件革新到伦理重构的完整技术图谱
第一章:感知模块技术体系重构
1.1 传感器硬件革命:物理边界突破
激光雷达领域呈现两极分化:
- 高精度方向:禾赛AT1440采用1550nm光纤激光器,实现600米探测距离,可识别0.3°倾角的道路标线磨损
- 低成本方向:速腾聚创EM4通过MEMS微振镜技术,将量产成本压缩至499美元,点云密度达60万点/秒
仿生视觉传感器突破传统光学极限:
- 香港科大研发的复眼式摄像头集成132个独立光学单元,实现180°视场角下的动态聚焦(<5ms)
- 特斯拉第三代仿生镜头模仿鹰眼结构,支持从10米到500米的无级变焦
毫米波雷达进入4D时代:
- 安波福第五代产品通过MIMO阵列实现0.1°方位分辨率,可构建包含速度矢量的4D环境模型
- 华为96线4D雷达融合CMOS工艺,探测帧率提升至60Hz

1.2 多模态融合范式演进
技术架构对比:
| 融合方式 | 代表方案 | 时延(ms) | 精度提升 | 适用场景 |
|---|---|---|---|---|
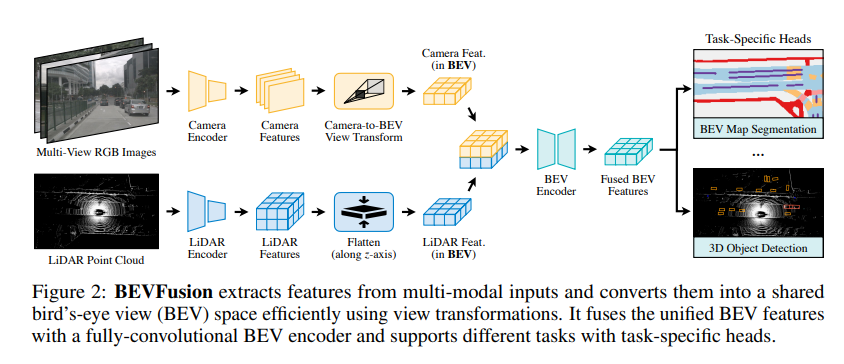
| 前融合 | BEVFusion | 82 | 34% | 城市复杂道路 |
| 后融合 | TransFuser | 65 | 28% | 高速公路 |
| 混合融合 | AutoAlignV2 | 73 | 41% | 极端天气 |
典型案例:
- 小鹏G9:采用BEVFusion架构,激光雷达与摄像头在BEV空间完成特征对齐,夜间行人识别F1-score达0.97
- 理想L9:TransFuser系统通过注意力机制融合8路摄像头与5个毫米波雷达数据,交叉路口通过率提升62%
第二章:算法创新与计算范式跃迁
2.1 深度学习模型架构
三代模型演进路径:
- CNN时代(2020前):ResNet-152主导,依赖大量标注数据
- Transformer时代(2020-2024):ViT模型突破感受野限制
- 神经拟态时代(2025起):脉冲神经网络(SNN)实现生物级能效比
2025年主流模型对比:
| 模型名称 | 参数量 | 推理时延 | 能效比(TOPS/W) | 核心创新 |
|---|---|---|---|---|
| MindVLA | 1.2亿 | 45ms | 8.2 | 时空注意力机制 |
| Apollo 8.0 | 0.9亿 | 32ms | 11.4 | 稀疏卷积加速 |
| Tesla Hydra | 3.4亿 | 68ms | 5.7 | 多任务联合训练 |
2.2 动态环境建模技术
三维语义重建突破:
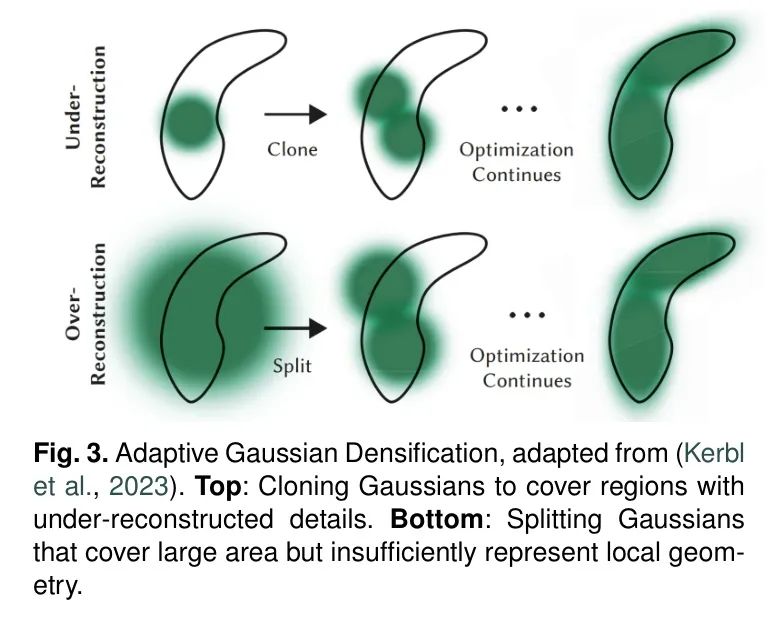
- 3D高斯溅射(3DGS):华为ADS 3.0系统实现毫米级场景重建,建模速度达30帧/秒
- 神经辐射场(NeRF):Waymo用于仿真训练,生成数据与真实场景误差<2cm
实时定位与建图(SLAM):
- 百度Apollo Lite系统融合GNSS、IMU与视觉里程计,定位精度达5cm(无GNSS信号时)
- 高德高精地图众包更新系统,日更新道路变化数据超100万条
第三章:极端环境应对体系
3.1 气象干扰解决方案
多传感器性能衰减模型:
| 气象条件 | 激光雷达衰减 | 摄像头衰减 | 毫米波雷达衰减 |
|---|---|---|---|
| 暴雨(50mm/h) | 58% | 72% | 12% |
| 浓雾(能见度<10m) | 83% | 91% | 9% |
| 沙尘暴 | 76% | 98% | 23% |
创新应对方案:
- 自适应融合权重算法:博世第六代系统根据环境置信度动态调整传感器权重
- 量子雷达原型机:北理工团队研发的量子纠缠雷达,在浓雾中探测距离提升300%
3.2 复杂交通场景
中国特有场景应对:
- 非机动车混流:滴滴自动驾驶采用注意力机制模型,对电动车轨迹预测误差<0.3m
- 道路施工识别:小鹏XNet系统通过语义分割识别37类施工标志,准确率98.7%
伦理困境案例:
- 广汽研究院伦理模块设定"最小群体伤害"原则,在无法避免碰撞时选择伤害最小的路径
- 欧盟最新法规要求感知系统必须记录事故前20秒的完整环境数据
第四章:产业生态与标准体系
4.1 供应链格局重塑
激光雷达市场格局:
| 厂商 | 市场份额 | 核心技术 | 客户群体 |
|---|---|---|---|
| 禾赛科技 | 34% | 光纤激光器 | 理想、蔚来 |
| 速腾聚创 | 28% | MEMS微振镜 | 小鹏、比亚迪 |
| Luminar | 19% | 1550nm激光 | 沃尔沃、极星 |
芯片算力竞赛:
- 英伟达Thor芯片:2000TOPS算力,支持16路摄像头数据并行处理
- 地平线征程6:1024TOPS,能效比达15.3TOPS/W,支持BEV原生计算
4.2 标准体系构建
中国标准重点:
- 数据安全:强制脱敏处理,禁止存储人脸、车牌等敏感信息
- 极端天气测试:新增10类中国典型气象场景(如梅雨、沙尘)
- 伦理审查:要求企业设立独立的AI伦理委员会
ISO 21448-2025核心内容:
- 定义可接受风险阈值:行人漏检率<0.0001%
- 新增测试场景:夜间低光照(<1lux)+暴雨复合场景
第五章:技术瓶颈与2030展望
5.1 现存技术瓶颈
物理层面限制:
- 光学衍射极限:摄像头分辨率难以突破0.5μm/像素
- 多普勒效应:毫米波雷达对横向运动敏感度不足
算法层面挑战:
- 长尾问题:侧翻车辆识别率仅76%,漂浮塑料袋误检率23%
- 多目标博弈:交叉路口多车交互场景决策失败率4.7%
5.2 颠覆性技术前瞻
量子感知:
- 中科大团队实现量子雷达原型机,探测精度达光子级别
- 量子纠缠时钟同步技术,将传感器同步误差压缩至皮秒级
仿生感知:
- 清华大学研发的"电子蝙蝠"系统,超声波阵列探测距离突破30米
- 仿生复眼摄像头动态范围扩展至160dB,超越人眼极限
车路云协同:
- 雄安新区试点5G-V2X系统,路侧单元每50米部署感知节点
- 边缘计算节点实时推送语义级环境信息,车端处理时延降低80%
结语:技术演进与社会重构
当自动驾驶感知精度突破99.9999%时,技术将面临哲学层面的挑战:
- 数据霸权:掌握道路环境数据的公司是否形成新型垄断
- 责任界定:传感器漏检导致的交通事故责任如何划分
- 人类驾驶权:当机器感知全面超越人类后,是否应该禁止人工驾驶
这些问题提示我们,自动驾驶不仅是技术革命,更是一场深刻的社会变革。未来的感知技术发展,需要在工程创新与社会伦理之间找到平衡点,才能真正实现"科技向善"的终极目标。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号