

LayerNorm 等其他归一化
LayerNorm 等其他归一化
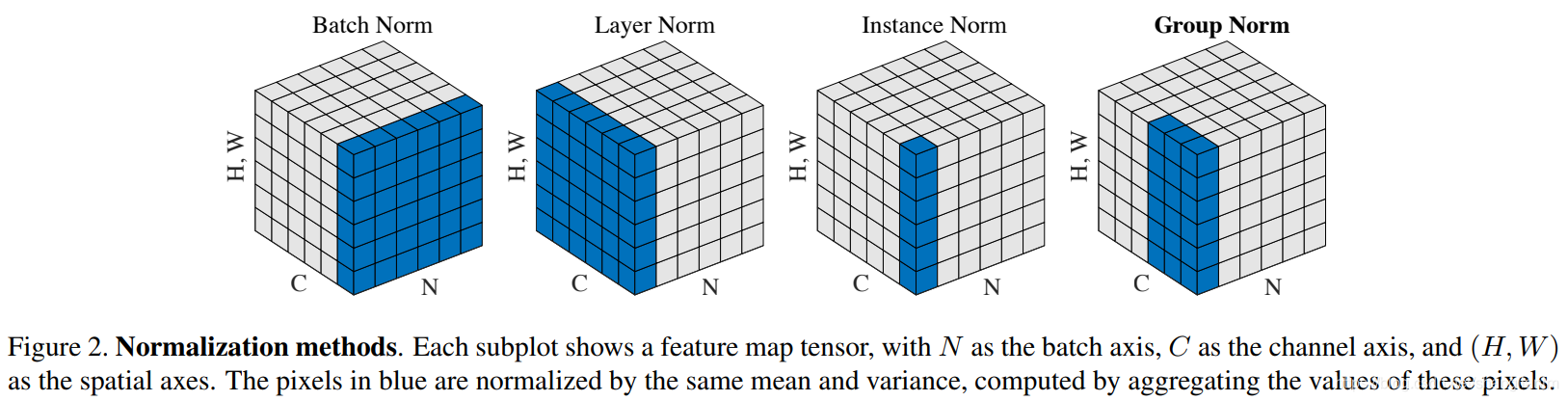
总览
BatchNorm:沿batch方向上,对 (N、H、W) 做归一化,保留通道C的维度
- 适用于CNN
- 对小batchsize效果不好;BN主要缺点是对batchsize的大小比较敏感
- 由于每次计算均值和方差是在一个batch上,所以如果batchsize太小,则计算的均值、方差不足以代表整个数据分布
LayerNorm:沿channel方向上,对 (C、H、W) 做归一化,保留通道N的维度
- 适用序列模型,如:RNN
- 不适应输入变化很大的数据,大Batch较差
InstanceNorm:在图像像素上,对 (H、W) 做归一化
- 优点:适用图像风格迁移,因为生成结果主要依赖于某个图像实例,
- HW做归一化。可以加速模型收敛,并且保持每个图像实例之间的独立。
- 不适应通道之间的相关性较强数据
GroupNorm:将channel分组,对 (C/G、H、W) 做归一化,在不同的Batch Size下具有较大的稳定性
- 优点:不同Batch Size下具有较大的稳定性
- 缺点:在大Batch 下性能略差于BN
其他归一化方式
Switchable Normalization(SN,2018年):将BN、LN、IN结合,赋予权重,让网络自己去学习归一化层
Positional Normalization(PN,2019年):提出了位置归一化算法来计算生成网络沿信道维数的统计量;
Batch Group Normalization(BGN,2020年)解决Batch Size退化和饱和的问题;
Batch Norm
torch.nn.BatchNorm2d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
num_features: 来自期望输入的特征数,该期望输入的大小为’batch_size x num_features [x width]’
eps: 为保证数值稳定性(分母不能趋近或取0),给分母加上的值。默认为1e-5。
momentum: 动态均值和动态方差所使用的动量。默认为0.1。
affine: 布尔值,当设为true,给该层添加可学习的仿射变换参数。
track_running_stats:布尔值,当设为true,记录训练过程中的均值和方差;
Layer Norm
Layer Normalization的思想与Batch Normalization非常类似,只是Batch Normalization是在每个神经元对一个mini batch大小的样本进行规范化,而Layer Normalization则是在每一层对单个样本的所有神经元节点进行规范化,即C,W,H维度求均值方差进行归一化(当前层一共会求batch size个均值和方差,每个batch size分别规范化)。 LN 不需要批训练,在单条数据内部就能归一化。
论文链接:https://arxiv.org/abs/1607.06450
torch.nn.LayerNorm(normalized_shape, eps=1e-05, elementwise_affine=True, device=None, dtype=None)
normalized_shape: 输入尺寸
[∗×normalized_shape[0]×normalized_shape[1]×…×normalized_shape[−1]]
eps: 为保证数值稳定性(分母不能趋近或取0),给分母加上的值。默认为1e-5。
elementwise_affine: 布尔值,当设为true,给该层添加可学习的仿射变换参数。
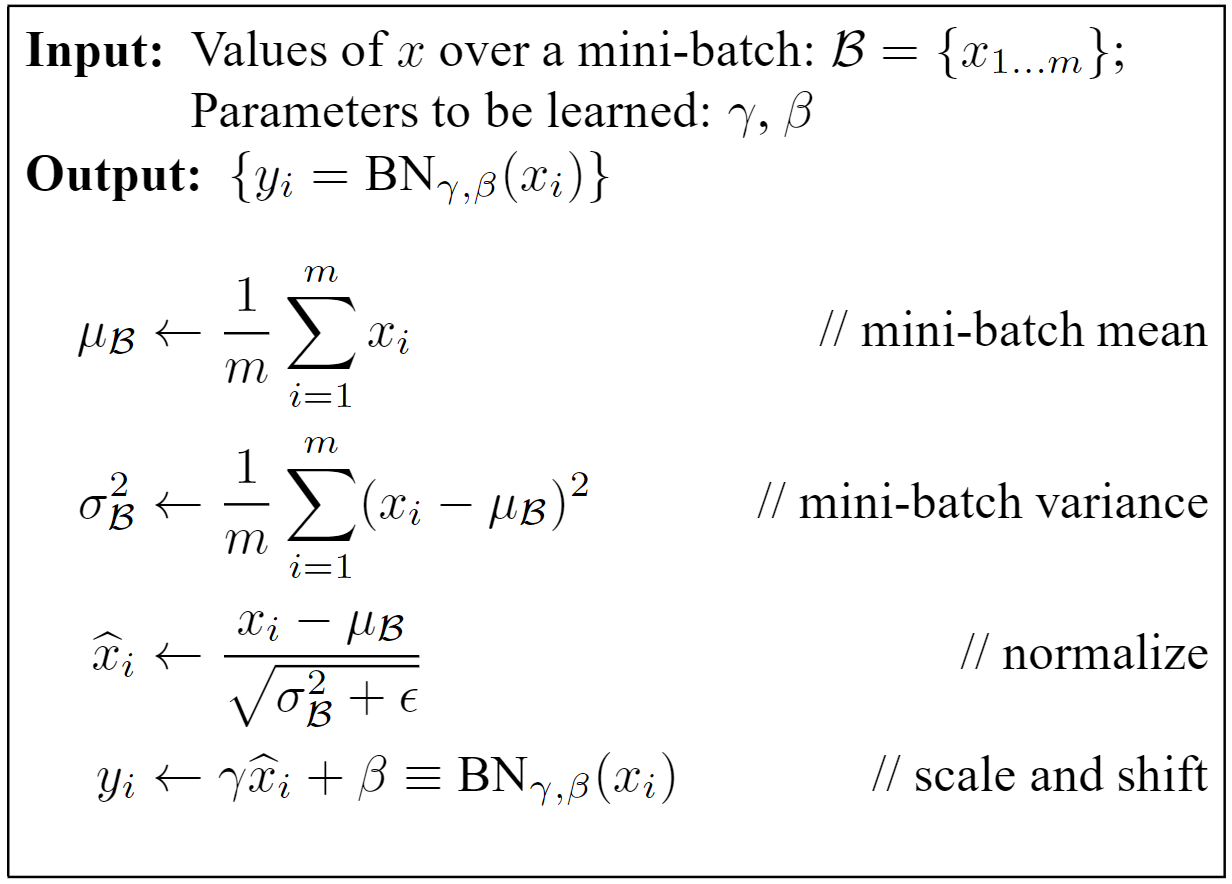
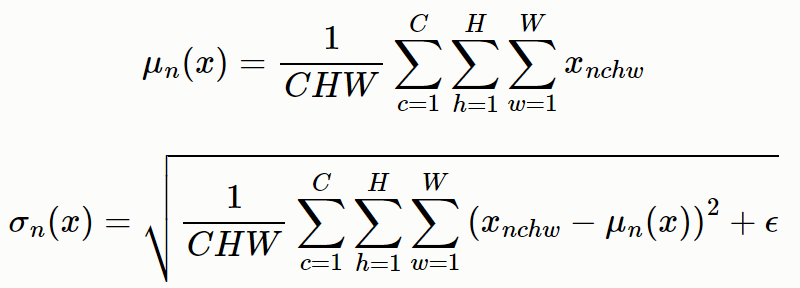
计算过程
-
沿着 batch 方向计算每个通道 (C, H, W) 的均值 \(\mu\) 和方差 $ \sigma $
-
做归一化
-
引入缩放和平移变量 计算最后的归一化数值 (平移和缩放)
其中前一项是归一化过程。分母中的 $ \epsilon $ 是一个非常小的数,作用是防止数值计算不稳定。 \(\gamma\) 和 $\beta $ 是仿射参数,将归一化后的数据再次放缩得到新的数据, \(\gamma\) 可以理解为标准差, $\beta $ 可以理解为均值,它们两个一般是可学习的。可以发现,, \(\gamma\) 和 , $\beta $ 是LayerNorm层仅有的可学习参数。
LN优缺点
-
LN针对单个训练样本进行,不依赖于其他数据,可以避免BN中受mini-batch数据分布的影响的问题。
-
LayerNorm中 没有batch的概念,所以不会像BatchNorm那样跟踪统计全局的均值方差,因此train()和eval()对LayerNorm没有影响。
-
LN特别适合处理变长数据,因为是对channel维度做操作(这里指NLP中的hidden维度),和句子长度和batch大小无关
用法上的差异
-
nn.BatchNorm2d(num_features)中的num_features一般是输入数据的第2维(从1开始数),BatchNorm中weight和bias与num_features一致。 -
nn.LayerNorm(normalized_shape)中的 normalized_shape是最后的几维,LayerNorm中weight和bias的shape就是传入的normalized_shape。 -
输出维度不同,BN 输出维度为C, LN输出维度为 N
transformer 为什么使用 layer norm
- 测试集中出现比训练集更长的数据,tranformer支持任意长度输入
- 长短不一的情况下,足够的batch_size的数据,文本数据较图像数据的分布差异更大
- 可能原因:批归一化会破坏向量的位置信息
Instance Norma, IN
对一个特征图的所有通道做归一化
Group Norma, GN
Group Normalization(GN) 则是提出的一种 BN 的替代方法,Group Normalization 将 channel 分成 num_groups组,每组包含channel / num_groups通道,则feature map变为(N, G, C//G, H, W),然后计算每组 (C//G, H, W)维度平均值和标准差,这样就与batch size无关。
GB的计算与Batch Size无关,因此对于高精度图片小BatchSize的情况也是非常稳定的
GN是为了解决BN对较小的mini-batch size效果差的问题。GN适用于占用显存比较大的任务,例如图像分割。对这类任务,可能 batch size 只能是个位数
GN的主要思想:在 channel 方向 group,然后每个 group 内做 Norm,计算 的均值和方差,这样就与batch size无关,不受其约束。
BN LN IN GN的区别
BN: 这个就是对Batch维度进行计算。所以假设5个100通道的特征图的话,5个batch中每一个通道就会计算出来一个均值方差,最后计算出100个均值方差。
LN: 对一个特征图的所有通道做归一化。5个10通道的特征图,LN会给出5个均值方差;
IN: 仅仅对每一个图片的每一个通道最归一化。也就是说,对 H,W 维度做归一化。假设一个特征图有10个通道,那么就会得到10个均值和10个方差;要是一个batch有5个样本,每个样本有10个通道,那么IN总共会计算出50个均值方差;
GN: 这个是介于LN和IN之间的一种方法。假设Group分成2个,那么10个通道就会被分成5和5两组。然后5个10通道特征图会计算出10个均值方差。
参考资料:
https://www.cnblogs.com/lxp-never/p/11566064.html#blogTitle0 非常详细
https://blog.csdn.net/qq_43426908/article/details/123119919 计算图解
https://mp.weixin.qq.com/s/lTwaTEAVjfOODg-w1Nb8tA
深度学习中的归一化方法总结(BN、LN、IN、GN、SN、PN、BGN、CBN、FRN、SaBN)
https://blog.csdn.net/liuxiao214/article/details/81037416 主要公式实现

 浙公网安备 33010602011771号
浙公网安备 33010602011771号