

1、前言
Visual Components是一款应用于3D数字化/自动化工厂仿真的软件。本文是该软件的基础操作介绍,希望能帮助大家入门这个软件。
2、基础操作
打开软件
打开Visual Components软件,进入软件界面。

如上图所示,软件界面分位5大区域。5大区域会在文章的后半段详细介绍。
在打开软件后,我们先对界面进行设置。设置在左上角的文件选项卡里,点击文件选项卡。
点击后会出现如下界面:

先点击信息,然后勾选“包含组件”
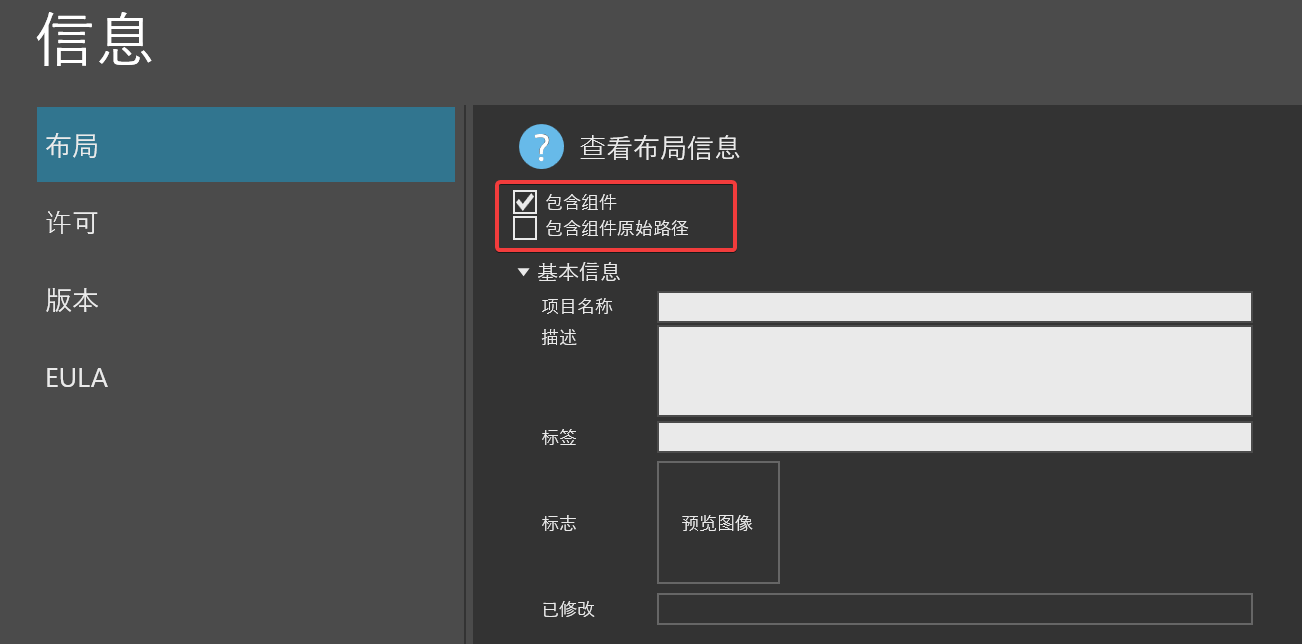
这一步的作用是使得保存时项目文件会将所有模型打包。如果不勾选,那么在不同设备间转移项目时会出现组件丢失的情况。
下一步,设置界面的颜色。
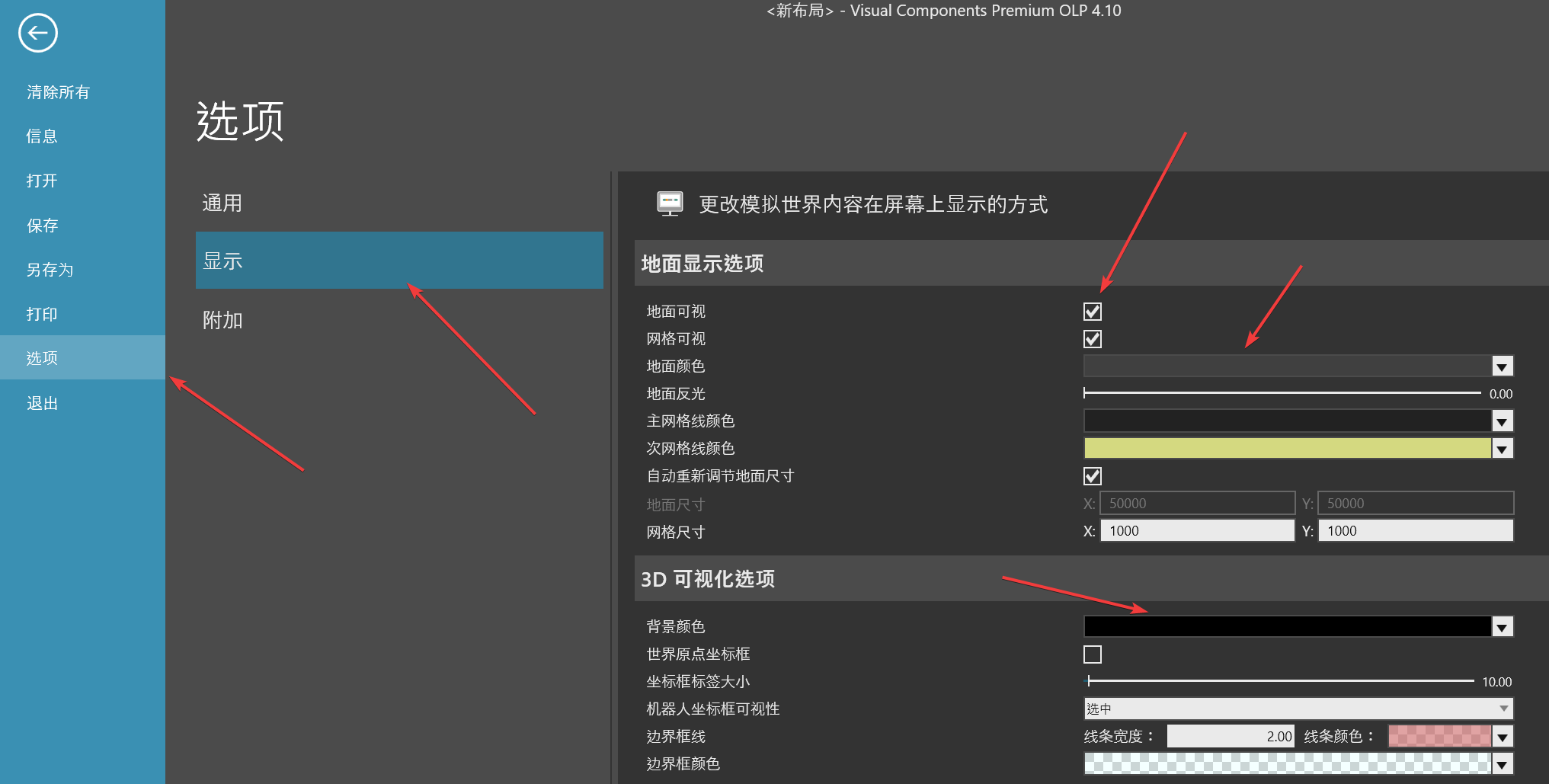
如上图所示的设置可以将界面更换为黑色,这样可以使眼睛更舒服。当然,你也可以更改为其它颜色。
在更改完成后,记得点击右下角的确定
导入模型
在软件的左侧“电子目录”区域里面,可以看到软件的模型库。选择需要的模型,直接拖拽进入3D视界便可以添加模型。或者,你有非模型库的3D模型(VC支持类型如下表)也可以直接拖入3D视界。
直接拖入的模型也有可能面数太多,占用内存大。如出现这种情况,可以选择使用“导入几何源”功能,该功能在开始选项卡里面 ,也可以选择简化模型。
,也可以选择简化模型。
以下是Visual Components 4.10支持的3D文件:
| 名称 | 版本 | 扩展名 | 导入 | 导出 |
| 3D Manufacturing Format |
1.2.3 |
.3mf | ✔ | ✔ |
| 3D Studio | 全部 | .3ds | ✔ | ✔ |
| ACIS | 高达2023 | .sat, .sab | ✔ | ❌ |
| ASCII Point Cloud file* | 全部 | .xyz, .pts, .xyzrgb | ✔ | ❌ |
| Autodesk FBX | FBX ASCII: 7100 到 7500. Binary: 全部 | .fbx | ✔ | ✔ |
| Autodesk Inventor | 直到2025 | .ipt, .iam | ✔ | ❌ |
| Autodesk Naviswork | 版本 2012到 2025 | *.nwd | ✔ | ❌ |
| Autodesk RealDWG* | AutoCAD 2000-2019 | .dwg, .dxf | ✔ | ✔ |
| Binary point cloud file* | 全部 | .bxyz | ✔ | ❌ |
| CATIA V4 | 最高 4.2.5 | .session, .dlv, .exp | ✔ | ❌ |
| CATIA V5 | 最高 V5_6R2024 | .CATDrawing, .CATPart, .CATProduct, .CATShape, .cgr | ✔ | ❌ |
| CATIA V6 | 最高 V5_6R2024 | .3dxml | ✔ | ❌ |
| COLLADA | 全部 | .dae | ✔ | ❌ |
| Creo | Pro/Engineer 19.0,最高Creo 11.0 | .asm, .neu, .prt, .xas, .xpr | ✔ | ❌ |
| GL Transmission Format | 版本 2.0 | .gltf, .glb | ✔ | ❌ |
| I-deas | 最高 13.x (NX5) 和NX I-deas 6 | .mf1, .arc, .unv, .pkg | ✔ | ❌ |
| IFC2x | 2 到 4 | .ifc, .iczip | ✔ | ❌ |
| IGES | 5.1 到 5.3 | .igs, .iges | ✔ | ❌ |
| Igrip/Quest/VNC | 全部 | .pdb | ✔ | ✔ |
| JT* | 高达10.9 | .jt | ✔ |
✔ |
| Parasolid | 高达 v36.1 | .x_b, .x_t, .xmt, .xmt_txt | ✔ | ❌ |
| PRC | 全部 | .prc | ✔ |
✔ |
| Revit | 2015 到 2024 | .rvt | ✔ | ❌ |
| Robface | 全部 | .rf | ✔ | ❌ |
| Rhino | 4 到 8 | .3dm | ✔ | ❌ |
| Solid Edge | 1至20、ST1至ST10、2019至2024 | .asm, .par, .pwd, .psm | ✔ | ❌ |
| SolidWorks |
97直到2024 |
.sldasm, .sldprt | ✔ | ❌ |
| STEP* | 最高 AP 203 E1/E2, AP 214 和 AP 242 | .stp, .step | ✔ | ✔ |
| Stereo Lithography(ASCII 和 Binary) | 全部 | .stl | ✔ | ✔ |
| U3D | ECMA-363第一、第二和第三版 | .u3d | ✔ | ✔ |
| Unigraphics (Siemens PLM software NX) | UG11 至 UG18、UG NX、NX5 至 NX12、NX1847 至 NX2406 | .u3d | ✔ |
✔ |
| VDA-FS | 1.0 和 2.0 | .vda | ✔ | ❌ |
| VRML* | 1.0 和 2.0 | .wrl, .vrml | ✔ | ✔ |
| Wavefront* | 全部 | .obj | ✔ | ✔ |
如果你要添加自己的模型库,或者寻找以前版本的模型库。则需要点击“电子目录”标题下方的“+”号。
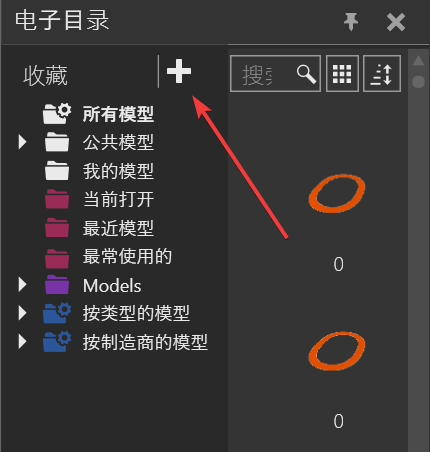
再点击“编辑来源”、“添加新来源”即可。
转换视角
关于视角转换,可以查看官方帮助文档。
在Visual Components中,旋转视角需要按住并拖拽鼠标右键,平移视角按住并拖拽鼠标中键,缩放视角使用鼠标滚轮。
除开鼠标,你还可以用3D视界左下角的 来切换视角。
来切换视角。
3、搭建布局
在学会拖入组件后,我们便可以开始进行布局的搭建了。
接口
接口是VC软件里的一种用来关联两个或更多组件的功能。在以后的博文中,我会详细介绍。现在我们只需要学会使用现成的接口就行了。
使用开始选项卡里的pnp命令可以将接口对接 。
。
也可以使用连接、接口 (注意:这个位置的接口连接功能只能连接抽象接口)。
(注意:这个位置的接口连接功能只能连接抽象接口)。
以下是一个接口示例,将一个工具对接到机器人上。
从上面可以看出,接口是一些预设好的统一设定。通过相同接口、不同组件的切换来快速完成不同布局的搭建。
添加其它组件
在开始界面里,分别搜索“conveyor”、“Car Tyer”、“IRB 120”、“RG6”并将它们放入3D视界。
如下图所示:
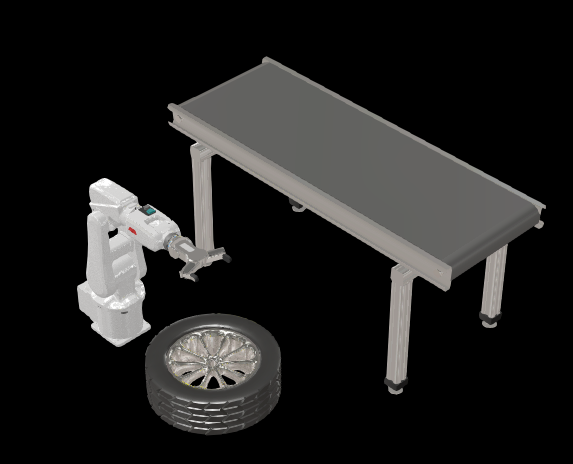
其中,“RG6”工具是通过PNP指令连接的。
添加结束之后,选择输送带,将其高度调整至零(如下图)。
机器人编程
将机器人添加到布局后,我们便可以开始尝试操作机器人。
在程序选项卡里选择点动 。
。
在选择点动后便可以随意操作机器人。
点击机器人模型可以操作某个关节:
拖动点动坐标框可以以笛卡尔坐标系移动机器人。

在右侧的点动数据框内可以直接修改数值移动机器人。
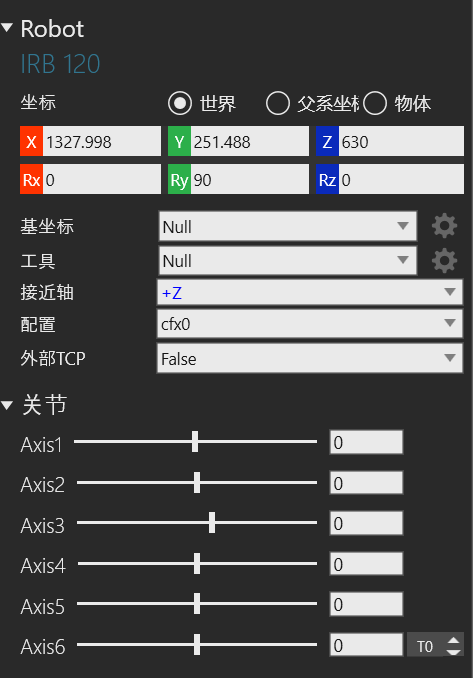
在右侧可以更换坐标系
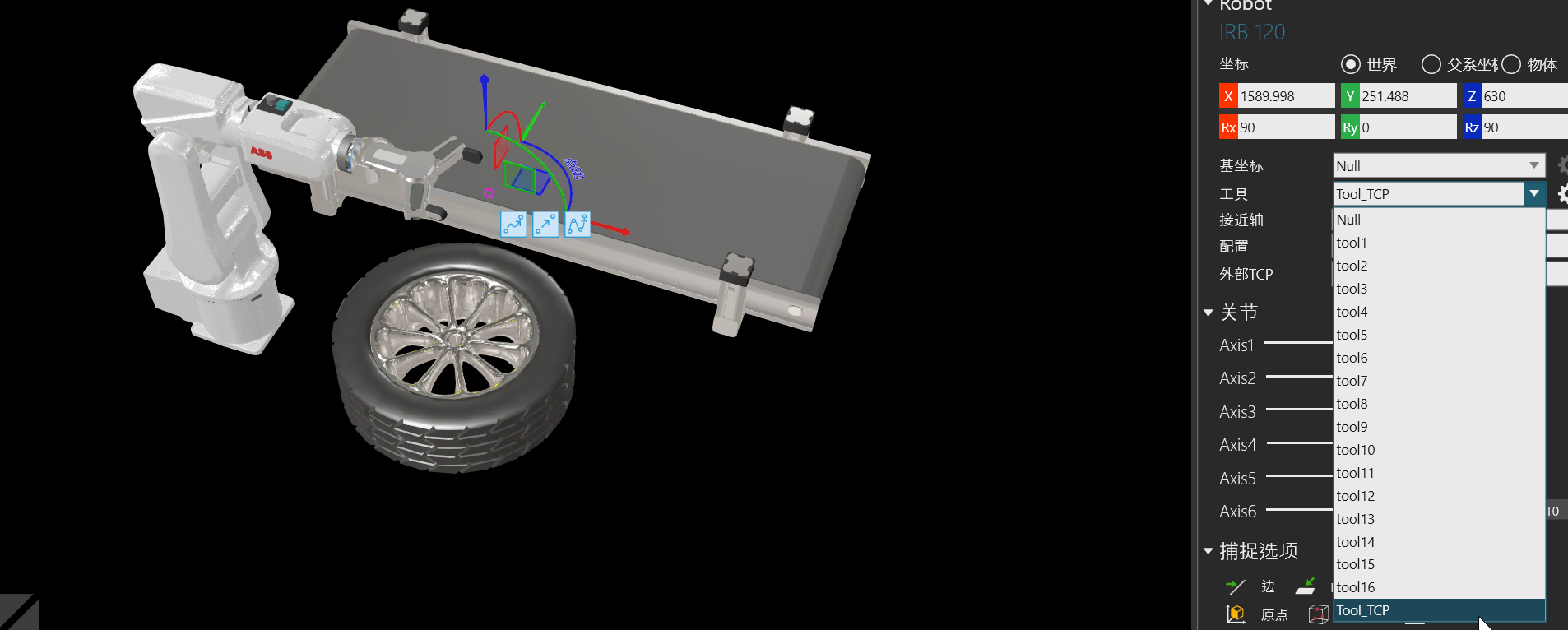
如图,我们选择1号坐标系“tool1”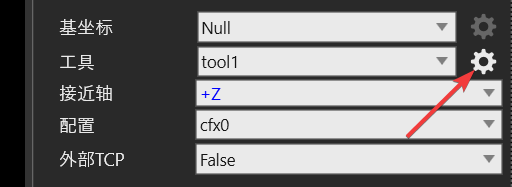 ,并点击右侧的齿轮。
,并点击右侧的齿轮。
在出现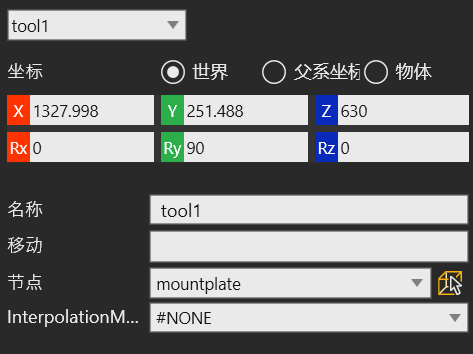 界面后,便可以捕捉、移动坐标系。
界面后,便可以捕捉、移动坐标系。
这里我们直接移动:
移动完毕以后记得关闭工具属性界面。
勾选“教授覆盖菜单”:
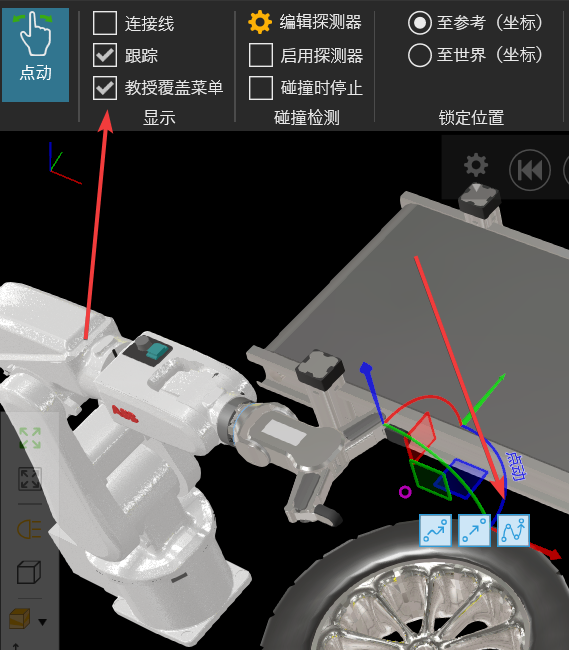
勾选后会出现如图三个图标,这三个图标的功能是用来记录示教点。
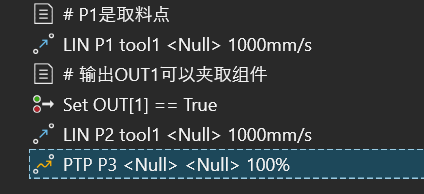
接下来我们开始编程。
如图所示,我记录了三个点位:

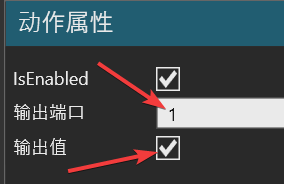
再在左侧界面里面添加OUT[1]信号输出,点击 图标,在右侧输入“1”,并勾选“输出值”。
图标,在右侧输入“1”,并勾选“输出值”。
得到如下画面。
在输送带上添加点位,大概位置如下:

如果点位无法移过去,可以尝试跟换大型机器人或者将机器人摆放到离输送带更近的点位。
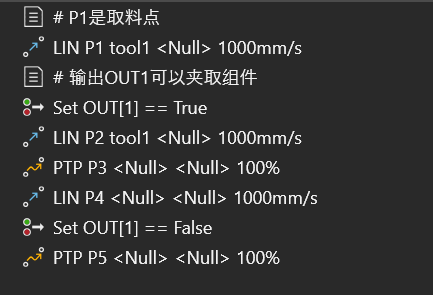
关闭OUT[1],操作方法与输出一致,但是不勾选“输出值”。添加一个远离输送带的点位(最好是原点)。
添加完后如下所示:
4、仿真
在3D视界的上方,有这样一排图标:

它们的功能分别为:“仿真设置”、“重置仿真”、“开始仿真”、“仿真时间”、“仿真倍数”、“倍数调整”、“仿真输出PDF、视频、VR”。
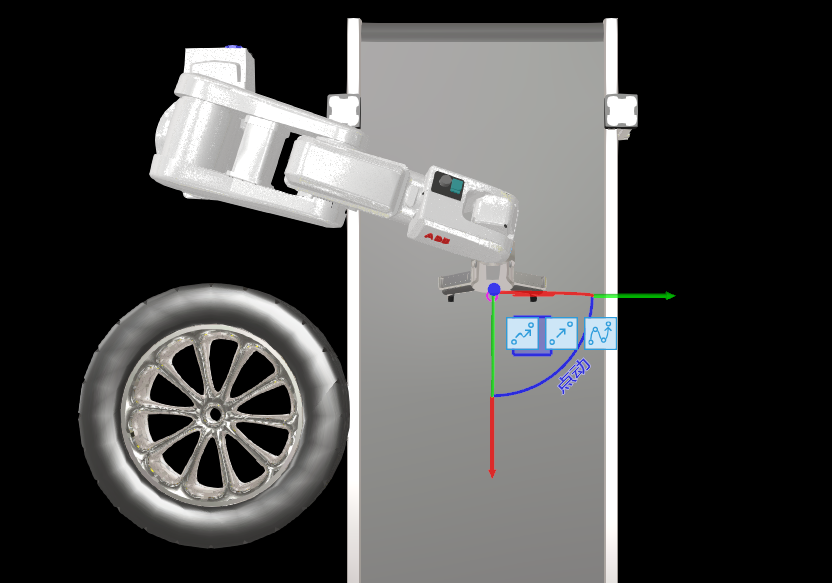
在上一步,我们已经搭建好了一个小布局,现在点击“开始仿真”
如果没出错的话,效果应该是这样:
可以看到。我们已经完成了一个布局,并成功进行了仿真。展现了机器人抓取、放置物料的动作。
教程到这里就结束了,请等待下一篇教程,以后的教程将会分功能来讲,这篇教程也会随着其它教程的完善而完善。
如果有问题可以直接问我,在工作的闲暇之余我会尽量回答。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号