
温故知新,机器人进化论之标准化通信接口协议VDA 5050
什么是VDA 5050

VDA 5050是一种用于自动引导车(AGV)和移动机器人(AMR)与调度或车队管理系统之间的标准化通信接口协议/规范。它由德国汽车工业协会(VDA)与德国机械设备制造业联合会(VDMA)联合制定,目的是解决不同厂家机器人之间互联互通的难题
起源与发展
发起组织:VDA 5050标准由德国汽车工业协会(VDA)和德国机械与设备制造业联合会(VDMA)联合发起,联合卡尔斯鲁厄理工学院(KIT)的物流研究所(IFL)支持制定,目标是为自动引导车(AGV)和移动机器人(AMR)与车队管理系统之间建立统一的通信标准。
首次发布:最早的版本在2019年发布,随后在2022年发布了2.0版本(正式规范化大规模应用内容)。
随后持续迭代,在2024年8月发布VDA 5050 2.1.0版本,引入了更多对高自主性机器人的支持(如“corridors”障碍自由避让等增强功能)。
最新官方发布版本为2.1.0(截至2025年),可用于当前开发与集成。
为什么它诞生?
随着AGV/AMR在制造业、仓储、物流等行业的普及,不同供应商的车辆之间缺乏统一通信标准,导致:
- 调度系统难集成多个品牌车辆
- 扩展和维护成本高
- 现场混合车队难以统一管理
VDA 5050的目标就是解决这些关键问题,使不同品牌的车辆可以在同一车队管理软件下协同工作。
德国汽车工业协会(VDA)官网
GitHub官方仓库
1. 前言(Foreword)
该接口由德国汽车工业协会(德语缩写VDA)与德国机械设备制造业联合会(德语缩写VDMA)合作建立。双方旨在创建一个通用接口。接口变更提案应提交至VDA,经与VDMA共同评估后,若获批准则纳入新版状态。欢迎通过GitHub为本文件贡献力量,代码库地址如下:http://github.com/vda5050/vda5050
2. 文档目标(Objective of the document)
该接口旨在简化新车辆与现有主控系统的连接,从而在汽车工业应用中实现与现有自动导引车(AGV)系统的集成,并支持不同制造商的AGV与传统系统(库存系统)在同一工作环境中并行运行。
主控系统(master control)与AGV之间应定义统一接口。具体实现需满足以下要点:
- 描述AGV与主控之间通信的标准,从而为利用协同运输车辆集成到连续过程自动化中的运输系统奠定基础。
- 通过增加车辆自主性、流程模块和接口等方式提升灵活性,最好是将一系列事件控制的指令链分离。
- 由于高度的“即插即用”能力,实现时间缩短,因为所需信息(例如订单信息)由中央服务提供且通常有效。车辆应能够独立于制造商投入运行,同时考虑职业安全要求。
- 通过统一、整体协调,并配合相应逻辑,降低复杂性并提升系统的“即插即用”能力,适用于所有运输车辆、车型和制造商。
- 通过车辆控制与协调水平之间的通用接口,提升制造商的独立性。
- 通过实现专有主控与上级主控之间的垂直通信,集成专有DTS库存系统(参见图1)。
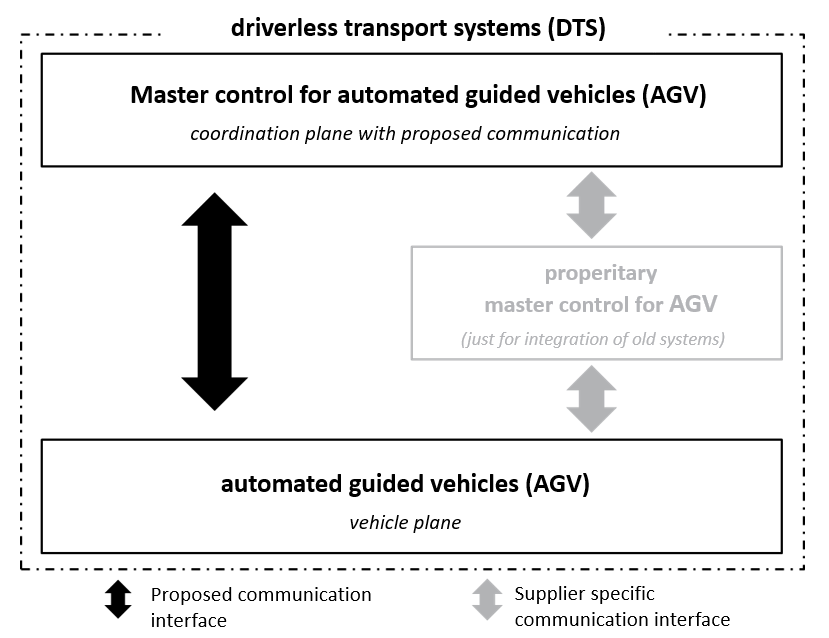
图1 DTS库存系统的集成
为实现上述目标,本文档描述了AGV与主控之间命令和状态信息通信的接口。
本文档最初未包含AGV与主控之间运行所需的其他接口(例如,在路径规划中自由考虑特殊技能等)或与其他系统组件通信(如外部外设、防火门等)的接口。
3. 范围(Scope)
本建议包含了关于自动导引车辆(AGV)与主控中心之间通信的定义和最佳实践。目标是允许具有不同特性的AGV(例如拖拉机或叉车AGV)能够以统一的语言与主控系统通信。这为主控系统中任意组合的AGV提供了基础。主控室提供命令并协调AGV的通信。
该接口基于汽车行业生产和工厂物流的需求。根据制定的要求,内物流的需求涵盖物流部门的要求,即从货物接收到生产供应再到货物出口,并通过自由导航车辆和导引车辆的控制进行物流流程。
与自动驾驶车辆不同,自动驾驶车辆能够独立解决基于相应传感器系统和算法的问题,并能根据动态环境的变化做出相应反应,或在随后迅速适应变化。自主能力如独立绕过障碍物,可以通过自由导航车辆和引导车辆实现。然而,一旦车辆本身完成路径规划,本文档便描述了车辆的自由导航(见术语表)。自治系统并非完全去中心化(群体智能),其行为通过预定义的规则定义。
为了实现可持续解决方案,下面描述了一个界面,其结构可以进一步扩展。这应能全面覆盖主控系统,适用于有导引车辆。自由导航的车辆可以整合进结构中; 本建议不包含详细的规范要求。
对于专有库存系统的集成,可能需要对接口作出单独定义,但这些定义不在本建议中考虑。
3.1 其他适用文件()
4. 需求与协议定义(Requirements and protocol definition)
通信接口设计支持以下需求:
- 控制至少1000辆车辆
- 实现不同程度自动驾驶车辆的整合
- 使决策能够实现,例如关于路线选择或路口行为
车辆应定期转移状态,或在状态发生变化时转移。
通信通过无线网络进行,考虑连接中断和消息丢失的影响。
消息协议是消息队列遥测传输(MQTT),该协议应与JSON结构结合使用。 MQTT 3.1.1在该协议开发过程中进行了测试,是兼容性所需的最低版本。MQTT允许将消息分发到子通道,这些子通道称为“主题”。MQTT网络的参与者订阅这些主题,并获得他们关心或感兴趣的信息。
JSON结构允许协议未来扩展并添加额外参数。参数以英语描述,以确保协议在德语区以外也能阅读、易懂且适用。
5. 沟通过程与内容
AGV运营的参与者至少包括以下:
- AGV系统的操作员提供基本信息
- 主控室负责组织和管理运营
- AGV执行命令
图2描述了作阶段的通信内容。在实现或修改过程中,AGV和主控系统需手动配置。
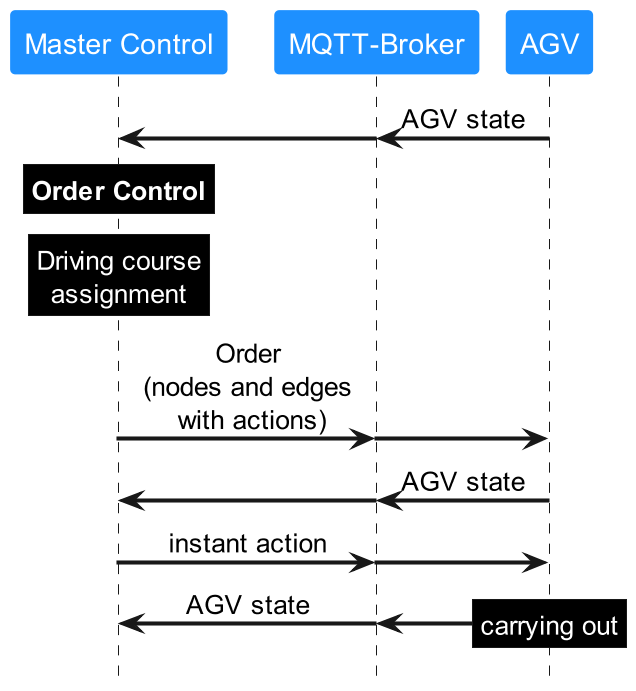
图2 信息流结构
在实施阶段,将建立由主控和AGV组成的无人驾驶运输系统(DTS, driverless transport systems)。必要的框架条件由操作员定义,所需信息要么由操作员手动输入,要么通过从其他系统导入存储在主控中。本质上,这涉及以下内容:
- 路由定义:通过CAD导入,可以将路由导入主控点。或者,操作员也可以在主控中手动实现路由。路线可以是单行道,也可以是根据车辆尺寸比例限制车辆的通行等。
- 路由网络配置: 线路上定义了装卸站、电池充电站、周边环境(闸门、电梯、闸机)、候车站、缓冲站等。
- 车辆配置:AGV的物理属性(尺寸、可用载具支架等)由操作员存储。 AGV应以本文件第6.15节主题“事实说明”(factsheet)中定义的特定方式传达该信息。
上述路由配置及路由网络不包含在本文档中。 它们构成了主控基于这些信息和运输要求完成命令控制和驾驶路线分配的基础。AGV的订单随后通过MQTT消息代理传送到车辆。然后,它会在作业执行的同时,持续向主控报告其状态。这同样是通过MQTT消息代理完成的。
主控功能包括:
- AGV的命令分配
- AGV的路线计算和制导(考虑每辆AGV的物理特性限制,如尺寸、机动性等)
- 阻碍的检测与解决(“死锁”)
- 能源管理:充电订单可能会中断转移订单
- 交通控制:缓冲路线与等待位置
- 环境的(暂时)变化,比如释放某些区域或改变最大速度
- 与门、门、电梯等外围系统的通信。
- 通信错误的检测与解决
AGV的功能包括:
- 本地化
- 沿相关路线导航(导引或自主)
- 动作的执行
- 车辆状态的持续传输
此外,集成商在配置整体系统时应考虑以下因素(列表不完整):
- 地图配置:主控与自动移动车的坐标系应匹配。
- 枢轴点:使用AGV的不同点或充电点作为枢轴点,导致车辆包层不同。参考点可能因情况而异,例如载重的AGV和不载物的AGV可能不同。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号