
碰撞检测方案分析选用
反馈的问题(背景)
碰撞检测:
传感器:激光雷达、气压检测、超声传感器、动作开关
场景:
水雾大,锈渣多,检测范围1米
自由度限制:
铰接自由度限制
坠落原因:
车轮侧面碰撞坞敦,铰接顶起车轮,磁力减少,机器人坠落。
传感器及应用
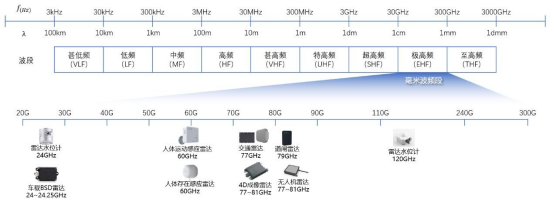
1、激光雷达(红外测距)(毫米波雷达)(超声波雷达)
2、气压检测
3、超声传感器
4、动作开关:电容接近开关、霍尔接近开关、电感接近开关。
5、限位开关
选择耐磨和耐撕拉和易加工的硅胶片。
汽车上应用多传感器:【单个硬件设备并不能获得所有需求数据,且在很多极端环境下,硬件设备也会出现问题,如激光雷达在大雾、大雨等极端天气下,测得数据会出现较大偏差;毫米波雷达不具备测高能力,难以判断前方静止物体是在地面还是在空中;车载摄像头只能拍摄到2D平面图像,即便通过深度学习的辅助,依旧无法精准测得周围物体与自动驾驶汽车之间的距离,因此自动驾驶汽车需要不同的硬件设备同时工作,让自动驾驶汽车“看”得更清楚,获得更多的道路数据。】
适应场景
1、 传感器:激光雷达(光学雷达)
原理:使用激光雷达,通过算法软件处理生成激光点云。
由于各物体反射角度不同,所以车道线和路面可区分开来。
使用场景:多用在车载激光雷达和地形建模。
缺点:激光雷达在大雾、大雨等极端天气下,测得数据会出现较大偏差。
拓展:红外测距、毫米波测距
毫米波雷达介绍:https://zhuanlan.zhihu.com/p/621407954 毫米波雷达的核心功能包括测距、测速、测方位角、微动探测和4D 成像等。
2、 传感器:电容接近开关、霍尔接近开关、电感接近开关
原理:
电容接近开关:只能检测金属。
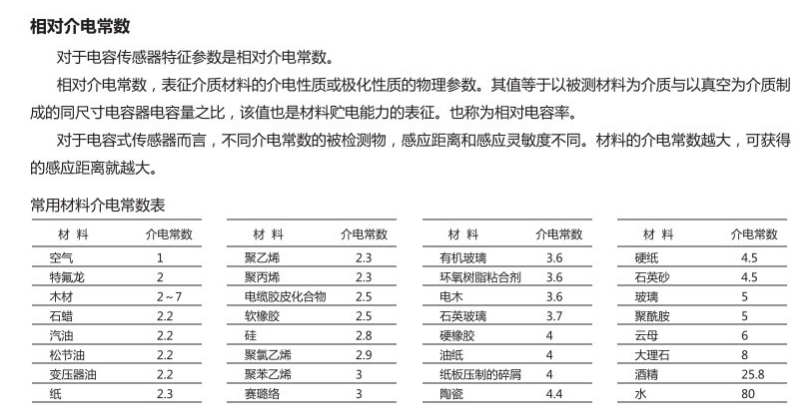
电感接近开关:不限于金属导体,也可以是绝缘的液体或粉状物体。在检测较低介电常数ε的物体时,可以顺时针调节多圈电位器(位于开关后部)来增加感应灵敏度。检测量程短(7mm,max)
霍尔接近开关:当一块通有电流的金属或半导体薄片垂直地放在磁场中时,薄片的两端就会产生电位差,这种现象就称为霍尔效应。两端具有的电位差值称为霍尔电势U。
使用场景:区分金属件与非金属件https://item.taobao.com/item.htm?id=730619611018&ali_refid=a3_430673_1006:1682042242:N:pJuxI0LUz1gPEDSmSn8COia%2BdlkPuLr5:93959a0d495c0780670cf02d1d2c940e&ali_trackid=230_93959a0d495c0780670cf02d1d2c940e&spm=a2e0b.20350158.31919782.57 欧姆龙。最长检测距离20mm。但只能检测磁铁。
检测距离25mm:
https://detail.1688.com/offer/644520935394.html?spm=a26352.13672862.offerlist.11.17af47e4pqoDBM(电容式)
金属相对介电常数很小,接近0.
3、 气压检测
定制压力反馈气囊:
4、 传感器:超声传感器
原理:
缺点:超声波雷达容易受天气情况影响,不同天气的传播速度不同;车速较快时误差较大;超声波散射角度大,不利于较远距离的回收信号传播
优点:成本低、穿透性强、防水、防尘
使用场景:主要应用在倒车雷达、自动泊车
|
|
密封性 |
成本 |
量程 |
常用检测功能 |
|
激光雷达 |
|
几千 |
最大几十公里 |
|
|
超声传感器 |
|
几百 |
最大几米 |
|
|
电容或电感接近开关 |
|
几十 |
几毫米 |
|
|
电容接近开关 |
|
300 |
25mm |
|
5、 传感器:限位开关
多个限位开关联动实现整周检测。
结论:
1、激光雷达等依赖传播时间测距的不适用于大水雾等环境不确定场景,且需要软件算法配合,实现难度较大。
2、大量程接近开关可用;气囊测压可用
3、限位开关可通过联动实现整圈检测。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号