OSTU大津法图像分割
OSTU图像分割
最大类间方差法,也成大津法OSTU,它是按图像的灰度特性,将图像分成背景和目标2部分。背景和目标之间的类间方差越大,说明构成图像的2部分的差别越大,当部分目标错分为背景或部分背景错分为目标都会导致2部
分差别变小。因此,使类间方差最大的分割意味着错分概率最小。
包括以下几个步骤
求取图像的灰度直方图
# 读取图像
o_img = cv2.imread('source/house.png')
# 灰度化
img = cv2.cvtColor(o_img, cv2.COLOR_BGR2GRAY)
# 获取图片的长宽
u, v = img.shape[:2]
# 求取直方图
channel, bins = np.histogram(img.ravel(), 256, [0, 256])
计算全局最佳阈值
# 初始化阈值
threshold = 0
# 求取灰度值的和
for i in range(256):
threshold += i * channel[i]
# 计算全局最佳阈值
threshold = int(threshold / (u * v))
分割图像
# 初始化输出图像
out = np.zeros((u, v), np.uint8)
for i in range(u):
for j in range(v):
# 如果大于阈值就将其设定为白色,否则就为黑色
if img[i][j] > threshold:
out[i][j] = 255
else:
out[i][j] = 0
代码实现
import cv2
import numpy as np
o_img = cv2.imread('source/house.png')
# 灰度化
img = cv2.cvtColor(o_img, cv2.COLOR_BGR2GRAY)
u, v = img.shape[:2]
channel, bins = np.histogram(img.ravel(), 256, [0, 256])
threshold = 0
for i in range(256):
threshold += i * channel[i]
threshold = int(threshold / (u * v))
out = np.zeros((u, v), np.uint8)
for i in range(u):
for j in range(v):
if img[i][j] > threshold:
out[i][j] = 255
else:
out[i][j] = 0
ret, mask_front = cv2.threshold(img, 175, 255, cv2.THRESH_OTSU)
cv2.imshow('OSTU', mask_front)
cv2.imshow('out', out)
cv2.waitKey(0)
cv2.destroyAllWindows()
运行结果
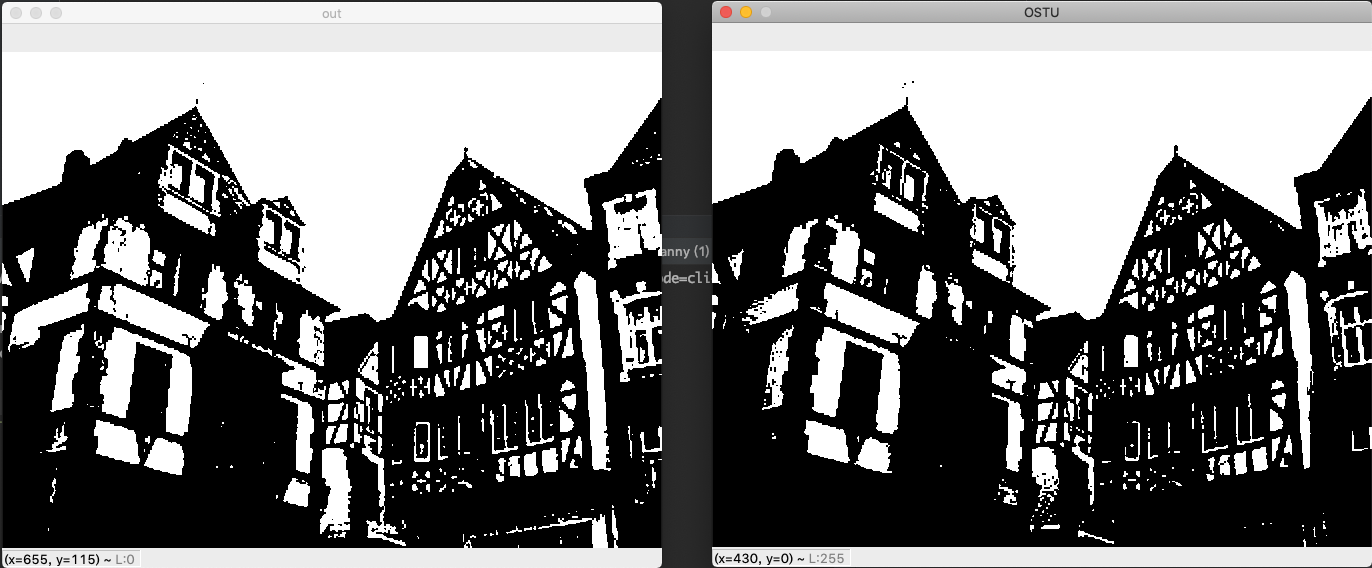
左侧为我自己实现的OSTU分割法,右侧为OpenCV自带的OSTU分割。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号