Canny边缘检测
Canny边缘检测算法
1986年提出,是OpenCV使用的边缘检测算法。
包含下面几个步骤
高斯滤波
滤波的目的一般是为了去除图像中的噪声,使图像变得更加平滑,减少噪点,从直观上来看就是使图像变得模糊。
对一幅图像,其中的点用\((m,n)\)表示,其灰度值使用函数表示:\(f(m,n)\)。
那么经过高斯滤波之后的灰度值变为:
\[g_\sigma(m,n)=\frac{1}{\sqrt{2\pi{\sigma}^2}}e^{-\frac{m^2+n^2}{2\sigma^2}}·f(m.n)
\]
简单说就是用一个高斯矩阵乘以每一个像素点及其邻域,取其带权重的平均值作为最后的灰度值。
计算梯度值和梯度方向
图像内容的边缘就是灰度值变化极大的区域的集合,图像中的梯度就代表像素的灰度值改变的程度与方向。
它可以通过点乘一个sobel或其它算子得到不同方向的梯度值 ,
。
综合梯度通过以下公式计算梯度值和梯度方向:
过滤非最大值
由于上一步计算出的边缘大小可能范围比真实的边缘要大一些,也就是说边缘被放大了,这个步骤使用一个规则来过滤掉不是边缘的点,使边缘的宽度尽可能为一个像素点,如果一个像素点是边缘上的点,那么这个点的梯度方向上的梯度值就是最大值,否则就不被认为是边缘,并将其设为0 。

使用上下阈值来检测边缘
一般情况下,使用一个阀值来检测边缘,但是这样做未免太武断了。如果能够使用启发式的方法确定一个上阀值和下阀值,位于下阀值之上的都可以作为边缘,这样就可能提高准确度。
它的步骤是这样的。
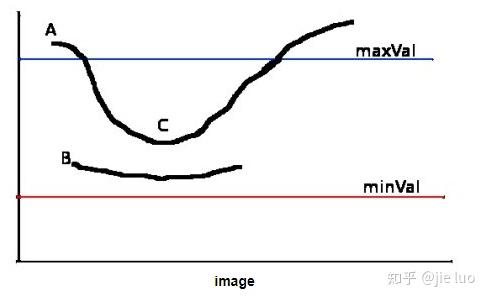
它设置两个阀值(threshold),分别为maxVal和minVal。其中大于maxVal的都被检测为边缘,而低于minval的都被检测为非边缘。对于中间的像素点,如果与确定为边缘的像素点邻接,则判定为边缘;否则为非边缘。
代码实现
import cv2
import numpy as np
# OpenCV 自带的边缘检测方法
# origin_canny_resolution = cv2.imread('source/flower2.jpg')
# edge = cv2.Canny(origin_canny_resolution, 60, 180)
# cv2.imshow('canny', edge)
# cv2.waitKey(0)
#
# cv2.destroyAllWindows()
import cv2
import numpy as np
def Canny(img):
# sobel filter
def sobel_filter(img, K_size=3):
if len(img.shape) == 3:
H, W, C = img.shape
else:
H, W = img.shape
# Zero padding
pad = K_size // 2
out = np.zeros((H + pad * 2, W + pad * 2), dtype=np.float)
out[pad: pad + H, pad: pad + W] = img.copy().astype(np.float)
tmp = out.copy()
out_v = out.copy()
out_h = out.copy()
# Sobel vertical
Kv = [[1., 2., 1.], [0., 0., 0.], [-1., -2., -1.]]
# Sobel horizontal
Kh = [[1., 0., -1.], [2., 0., -2.], [1., 0., -1.]]
# filtering
for y in range(H):
for x in range(W):
out_v[pad + y, pad + x] = np.sum(Kv * (tmp[y: y + K_size, x: x + K_size]))
out_h[pad + y, pad + x] = np.sum(Kh * (tmp[y: y + K_size, x: x + K_size]))
out_v = np.clip(out_v, 0, 255)
out_h = np.clip(out_h, 0, 255)
out_v = out_v[pad: pad + H, pad: pad + W]
out_v = out_v.astype(np.uint8)
out_h = out_h[pad: pad + H, pad: pad + W]
out_h = out_h.astype(np.uint8)
return out_v, out_h
# 获取边缘的宽度和角度
def get_edge_angle(fx, fy):
# 获取宽度
edge = np.sqrt(np.power(fx.astype(np.float32), 2) + np.power(fy.astype(np.float32), 2))
edge = np.clip(edge, 0, 255)
# 确认分母不为0
fx = np.maximum(fx, 1e-10)
# 使用tan的值计算角度,梯度方向
angle = np.arctan(fy / fx)
return edge, angle
# 根据角度的范围将角度归类到0, 45, 90, 135
def angle_quantization(angle):
angle = angle / np.pi * 180
angle[angle < -22.5] = 180 + angle[angle < -22.5]
_angle = np.zeros_like(angle, dtype=np.uint8)
_angle[np.where(angle <= 22.5)] = 0
_angle[np.where((angle > 22.5) & (angle <= 67.5))] = 45
_angle[np.where((angle > 67.5) & (angle <= 112.5))] = 90
_angle[np.where((angle > 112.5) & (angle <= 157.5))] = 135
return _angle
# 非极值抑制
def non_maximum_suppression(angle, edge):
H, W = angle.shape
_edge = edge.copy()
for y in range(H):
for x in range(W):
if angle[y, x] == 0:
dx1, dy1, dx2, dy2 = -1, 0, 1, 0
elif angle[y, x] == 45:
dx1, dy1, dx2, dy2 = -1, 1, 1, -1
elif angle[y, x] == 90:
dx1, dy1, dx2, dy2 = 0, -1, 0, 1
elif angle[y, x] == 135:
dx1, dy1, dx2, dy2 = -1, -1, 1, 1
# 边界处理
if x == 0:
dx1 = max(dx1, 0)
dx2 = max(dx2, 0)
if x == W - 1:
dx1 = min(dx1, 0)
dx2 = min(dx2, 0)
if y == 0:
dy1 = max(dy1, 0)
dy2 = max(dy2, 0)
if y == H - 1:
dy1 = min(dy1, 0)
dy2 = min(dy2, 0)
# 如果不是最大值,则将这个位置像素值置为0
if max(max(edge[y, x], edge[y + dy1, x + dx1]), edge[y + dy2, x + dx2]) != edge[y, x]:
_edge[y, x] = 0
return _edge
# 滞后阈值处理二值化图像
# > HT 的设为255,< LT 的设置0,介于它们两个中间的值,使用8邻域判断法
def hysterisis(edge, HT=100, LT=30):
H, W = edge.shape
# Histeresis threshold
edge[edge >= HT] = 255
edge[edge <= LT] = 0
_edge = np.zeros((H + 2, W + 2), dtype=np.float32)
_edge[1: H + 1, 1: W + 1] = edge
# 8 临近法
nn = np.array(((1., 1., 1.), (1., 0., 1.), (1., 1., 1.)), dtype=np.float32)
for y in range(1, H + 2):
for x in range(1, W + 2):
if _edge[y, x] < LT or _edge[y, x] > HT:
continue
if np.max(_edge[y - 1:y + 2, x - 1:x + 2] * nn) >= HT:
_edge[y, x] = 255
else:
_edge[y, x] = 0
edge = _edge[1:H + 1, 1:W + 1]
return edge
# 灰度化
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 使用高斯滤波器过滤,去除高频噪声
# gaussian = gaussian_filter(gray, K_size=3, sigma=1.4)
gaussian = cv2.GaussianBlur(gray, (3, 3), 1.4)
# 使用Sobel算子过滤图像
fy, fx = sobel_filter(gaussian, K_size=3)
# 获取边缘,宽度以及角度
edge, angle = get_edge_angle(fx, fy)
# 角度量化
angle = angle_quantization(angle)
# 非极值抑制
edge = non_maximum_suppression(angle, edge)
# 上下边缘检测
out = hysterisis(edge, 50, 10)
return out
if __name__ == '__main__':
# Read image
img = cv2.imread("source/flower2.jpg").astype(np.float32)
# Canny
edge = Canny(img)
out = edge.astype(np.uint8)
cv2.imshow("result", edge)
# OpenCV 自带的边缘检测方法
origin_canny_resolution = cv2.imread('source/flower2.jpg')
edge = cv2.Canny(origin_canny_resolution, 60, 180)
cv2.imshow('canny', edge)
cv2.waitKey(0)
cv2.destroyAllWindows()
实验效果比较
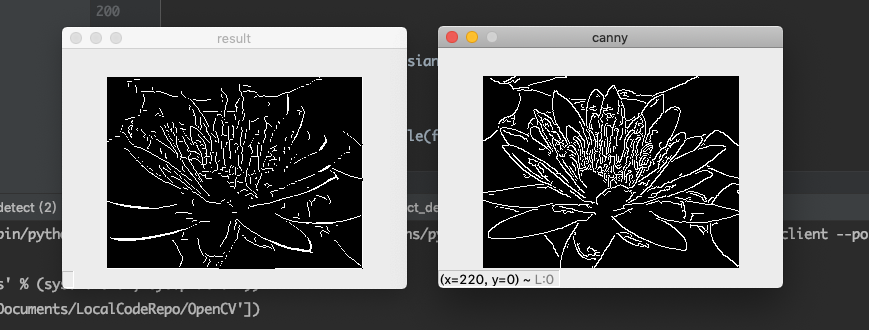
本左侧为自己实现的Canny边缘检测算法,右侧为OpenCV自带的边缘检测算法。
可以看到自己实现的算法相对而言比较离散,噪点较多。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号