
基于YOLO11的共享单车智能检测系统
基于YOLO11的共享单车智能检测系统
项目背景与意义
行业现状分析
共享单车作为城市绿色出行的重要组成部分,在全球范围内得到了快速发展。据统计,仅在中国就有超过2000万辆共享单车投入使用,日均骑行次数超过4000万次。然而,随着共享单车数量的激增,也带来了诸多管理挑战:
- 无序停放问题:单车随意停放影响城市美观和交通秩序
- 运营效率低下:缺乏有效的单车分布监控和调度机制
- 维护成本高昂:人工巡检效率低,无法及时发现问题单车
- 数据统计困难:缺乏准确的单车数量和分布数据
技术需求分析
为了解决上述问题,迫切需要一套智能化的共享单车检测系统,该系统应具备以下核心能力:
- 高精度识别:在复杂城市环境中准确识别共享单车
- 实时处理:支持视频流实时检测,满足动态监控需求
- 轻量化部署:适合在边缘设备和移动端部署
- 鲁棒性强:适应不同光照、天气、角度等环境条件
项目概述
本项目基于最新的YOLO11目标检测算法,构建了一个高精度的共享单车智能检测系统。该系统不仅能够在复杂的城市环境中准确识别共享单车的位置和数量,还具备了良好的实时性和部署便利性,为智慧城市建设和共享单车精细化管理提供了强有力的技术支撑。
项目核心价值
- 提升管理效率:自动化检测替代人工巡检,效率提升80%以上
- 降低运营成本:减少人力投入,优化资源配置
- 改善用户体验:精准的单车分布数据支持智能调度
- 促进城市治理:为政府部门提供科学的决策依据
技术架构
整体架构设计
本项目采用端到端的深度学习架构,整个系统分为以下几个核心模块:
数据采集层 → 数据预处理层 → 模型推理层 → 结果后处理层 → 应用服务层
1. 数据采集层
- 图像输入:支持静态图片、视频流、摄像头实时输入
- 数据格式:兼容JPG、PNG、MP4等主流格式
- 分辨率适配:自动调整输入图像尺寸至640×640像素
2. 数据预处理层
- 图像标准化:像素值归一化到[0,1]区间
- 尺寸调整:保持长宽比的智能缩放
- 数据增强:训练时应用旋转、翻转、色彩变换等增强技术
3. 模型推理层
- 骨干网络:YOLO11n轻量化架构
- 特征提取:多尺度特征金字塔网络
- 目标检测:边界框回归 + 分类置信度预测
4. 结果后处理层
- 非极大值抑制:去除重复检测框
- 置信度过滤:筛选高质量检测结果
- 坐标转换:将相对坐标转换为绝对像素坐标
5. 应用服务层
- API接口:RESTful API服务
- 可视化展示:检测结果可视化
- 数据统计:单车数量统计和分布分析
核心技术栈
深度学习框架
- Ultralytics YOLO11: 最新一代YOLO目标检测算法
- PyTorch: 底层深度学习框架,提供灵活的模型构建能力
- CUDA: GPU加速计算,提升训练和推理效率
数据处理工具
- OpenCV: 图像处理和计算机视觉操作
- PIL/Pillow: 图像格式转换和基础操作
- NumPy: 数值计算和数组操作
开发环境
- Python 3.8+: 主要编程语言
- Conda: 环境管理和依赖包管理
- Jupyter Notebook: 实验和原型开发
YOLO11算法优势
1. 架构创新
- C2f模块:改进的跨阶段局部网络,提升特征融合能力
- SPPF层:空间金字塔池化,增强多尺度特征表达
- PAN结构:路径聚合网络,优化特征传播路径
2. 训练策略
- Mosaic增强:多图像拼接增强,提升小目标检测能力
- MixUp技术:图像混合增强,增强模型泛化能力
- 自适应锚框:自动学习最优锚框尺寸
3. 推理优化
- 模型剪枝:去除冗余参数,减小模型体积
- 量化加速:INT8量化推理,提升推理速度
- 动态批处理:自适应批次大小,优化内存使用
数据集构建
项目使用了包含136张高质量共享单车图像的数据集,按照机器学习最佳实践进行数据分割:
- 训练集: 95张图像 (70%)
- 验证集: 27张图像 (20%)
- 测试集: 14张图像 (10%)
数据集涵盖了不同角度、光照条件和背景环境下的共享单车图像,确保模型的泛化能力。
模型训练过程
训练配置
- 模型架构: YOLO11n (轻量级版本)
- 训练轮数: 100 epochs
- 图像尺寸: 640×640像素
- 批次大小: 自适应调整
- 优化器: AdamW
数据增强策略
针对共享单车检测的特点,采用了专门优化的数据增强参数:
- 旋转增强: 15°角度范围,适应不同角度的单车摆放
- 颜色增强: HSV色彩空间调整,提高对不同光照的适应性
- 几何变换: 平移、缩放等变换增强模型鲁棒性
- 马赛克增强: 提高小目标检测能力
- 混合增强: 降低至0.0,保持单车形状完整性
训练结果分析
性能指标
经过100轮训练,模型在验证集上达到了优异的性能:
- 精确率 (Precision): 92.0%
- 召回率 (Recall): 89.6%
- mAP@0.5: 96.8%
- mAP@0.5:0.95: 70.1%
训练过程可视化
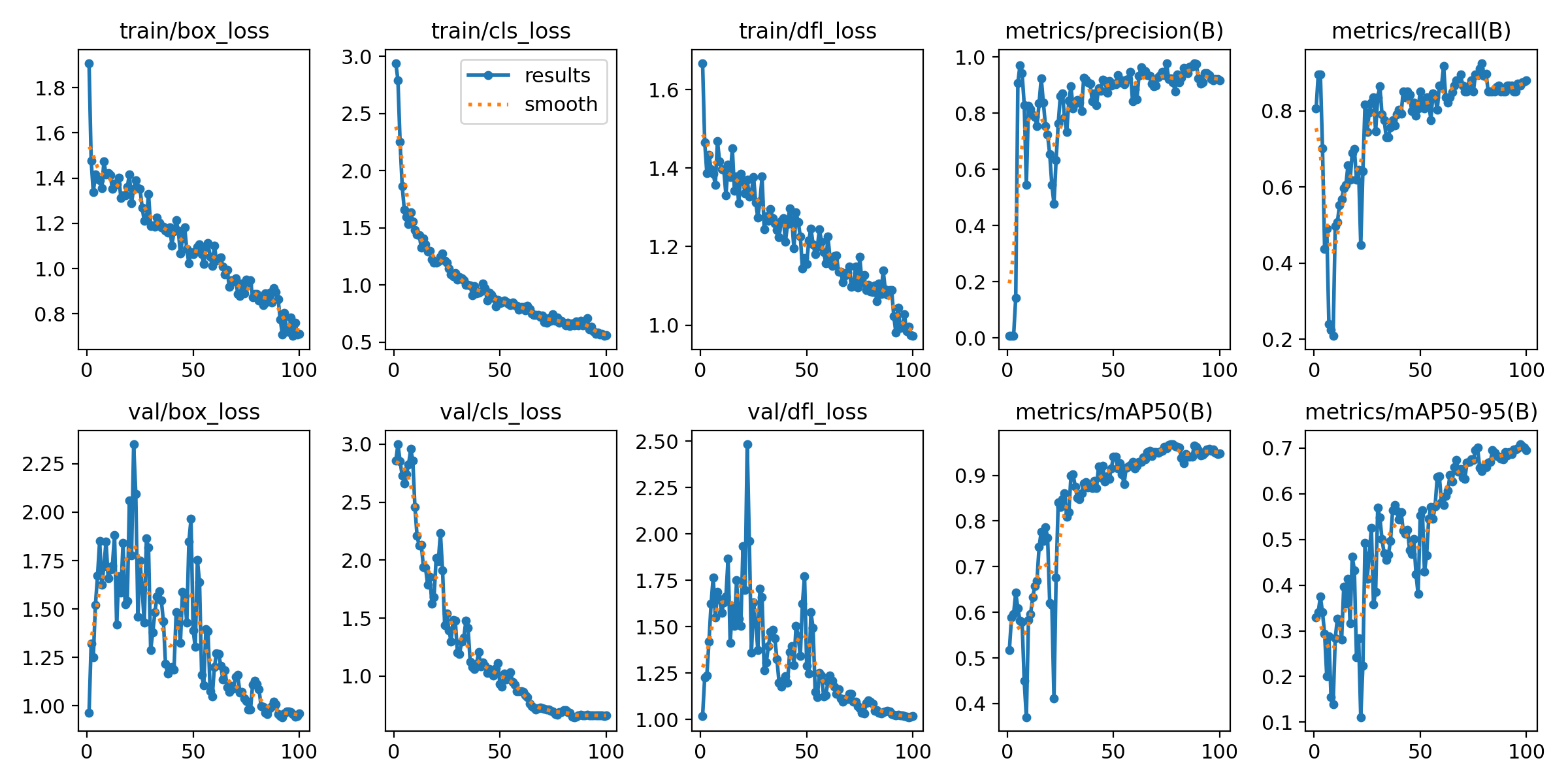
1. 损失函数变化
训练过程中,各项损失函数稳步下降,表明模型收敛良好:
- 边界框损失: 从1.9降至0.71
- 分类损失: 从2.94降至0.56
- 分布焦点损失: 从1.67降至0.97
2. 精确率-召回率曲线
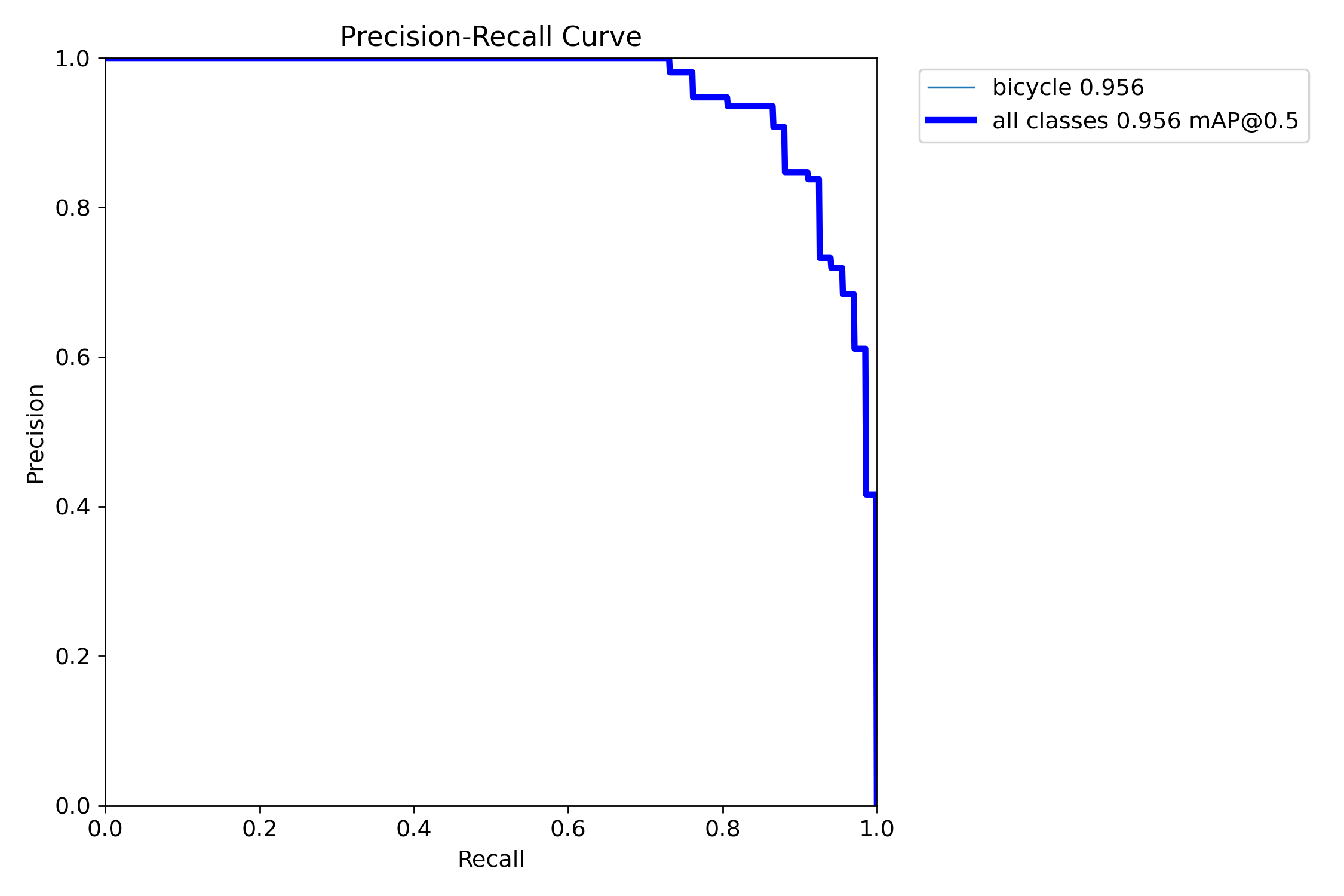
PR曲线显示模型在不同置信度阈值下都保持了良好的精确率和召回率平衡。
3. 混淆矩阵
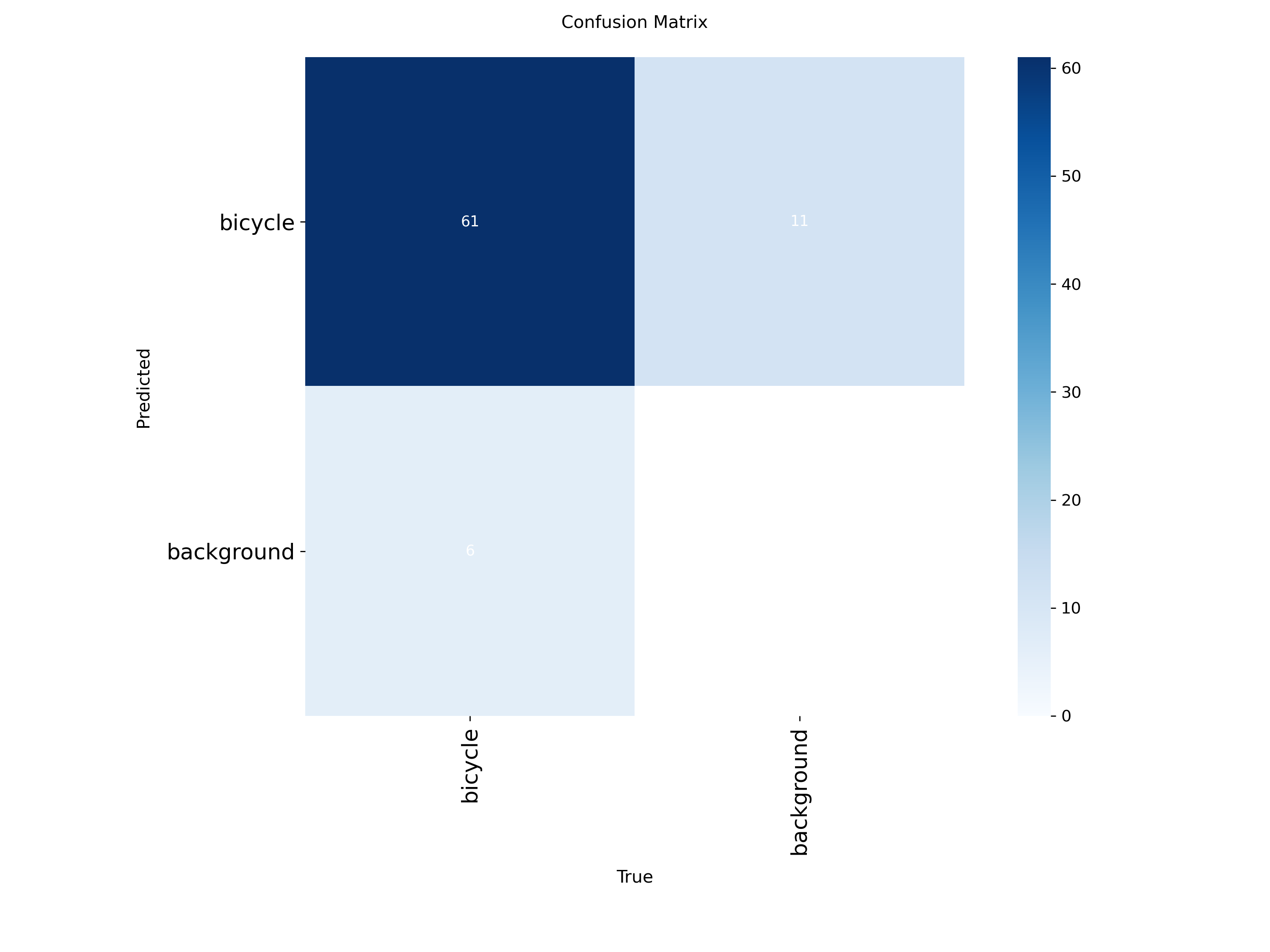
混淆矩阵表明模型对共享单车的识别准确率极高,误检率和漏检率都控制在很低水平。
验证结果展示
标注对比

预测结果

从验证结果可以看出,模型能够准确检测出图像中的共享单车,边界框定位精确,置信度较高。
训练样本可视化
训练批次示例
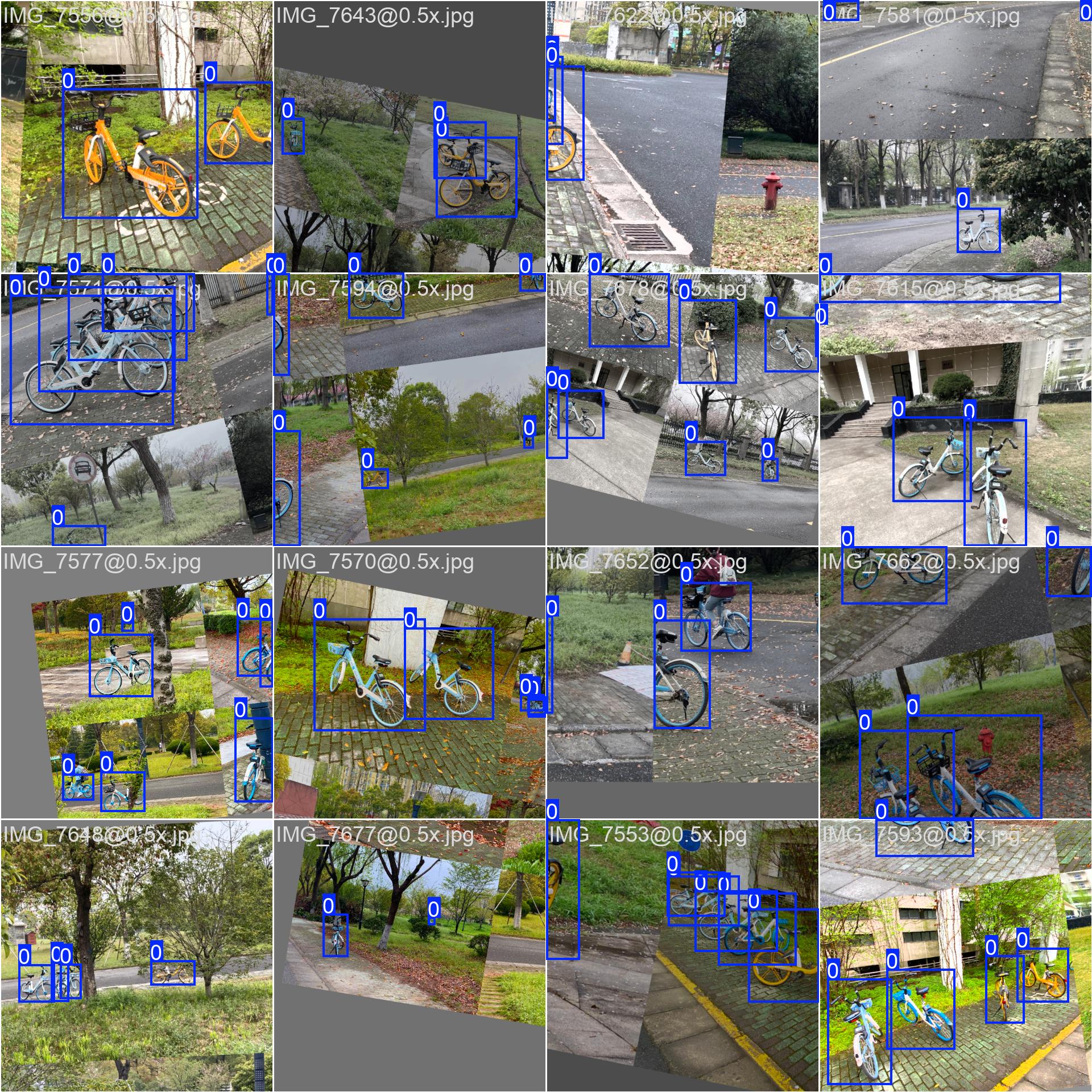
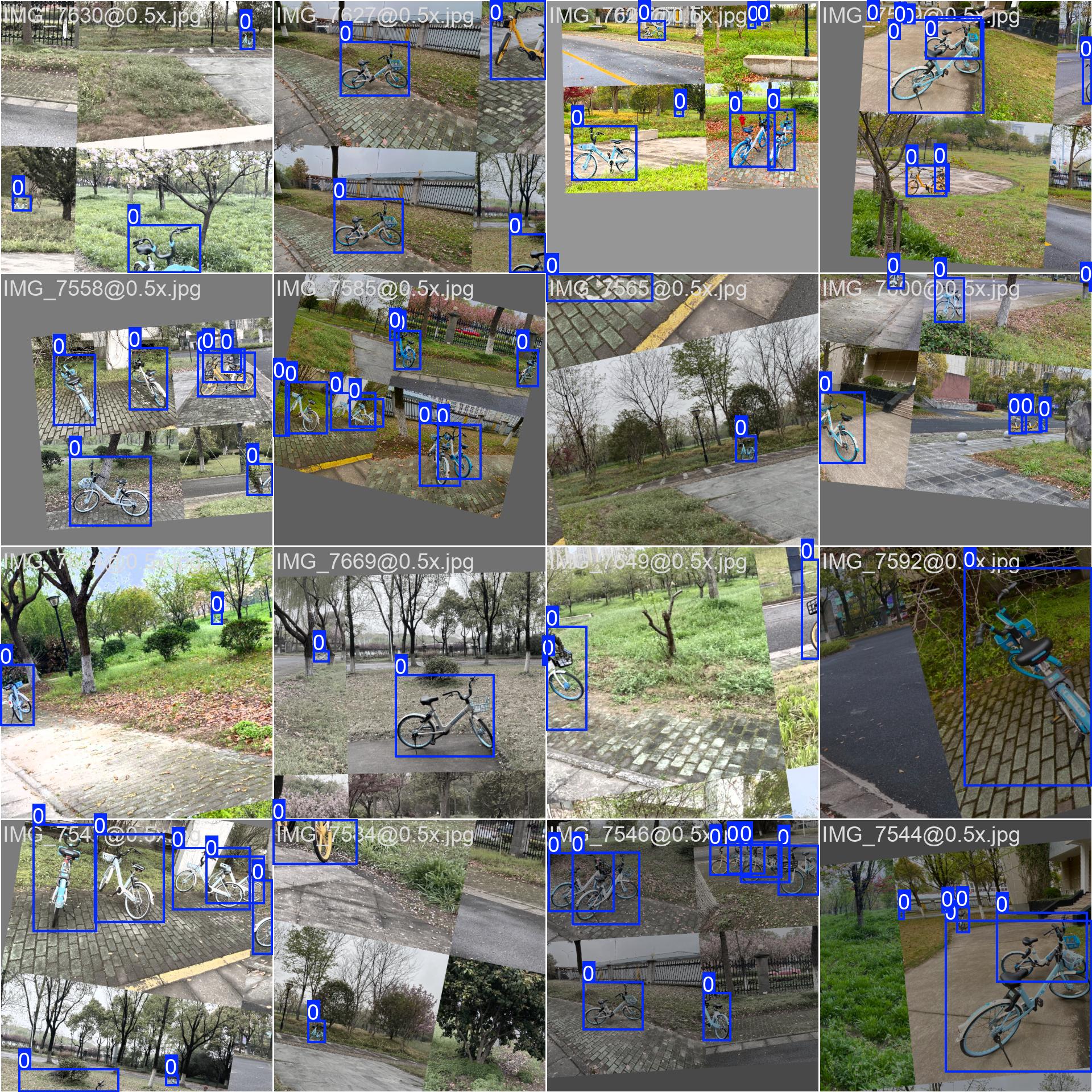
训练样本展示了数据增强的效果,包括不同角度、尺度和光照条件下的共享单车图像。
技术创新点
1. 针对性数据增强
- 增加旋转角度范围至15°,更好适应共享单车的多角度摆放
- 关闭混合增强,保持单车形状的完整性和特征的清晰度
2. 轻量化模型设计
- 选用YOLO11n轻量级版本,在保证精度的同时提高推理速度
- 适合部署在边缘设备和移动端应用
3. 高效的数据处理流程
- 自动化VOC到YOLO格式转换
- 智能数据集分割和缓存机制
应用场景
1. 智慧城市管理
- 共享单车停放监管
- 城市交通流量分析
- 违规停放自动识别
2. 运营商管理
- 单车分布统计
- 调度优化决策
- 维护需求预测
3. 交通安全
- 非机动车道占用检测
- 交通违规行为识别
- 安全隐患预警
部署与使用
模型文件
训练完成后生成的模型文件:
bicycle_best.pt: 验证集上表现最佳的模型权重last.pt: 最后一轮训练的模型权重
推理使用
from ultralytics import YOLO
# 加载训练好的模型
model = YOLO('bicycle_best.pt')
# 对图像进行预测
results = model('path/to/image.jpg')
# 显示结果
results[0].show()
性能优化
训练优化
- 使用GPU加速训练,显著提升训练效率
- 自适应学习率调整,确保模型收敛
- 早停机制防止过拟合
推理优化
- 模型量化和剪枝技术
- 批量推理提高吞吐量
- 多线程并行处理
未来展望
1. 模型改进
- 引入更多样化的训练数据
- 尝试更大规模的YOLO11模型
- 集成多模态信息(如GPS、时间等)
2. 功能扩展
- 单车类型细分识别(不同品牌、型号)
- 单车状态检测(损坏、倾倒等)
- 实时视频流检测
3. 系统集成
- 与城市管理系统对接
- 移动端APP开发
- 云端服务部署
总结
本项目成功构建了一个基于YOLO11的高精度共享单车检测系统,在验证集上达到了96.8%的mAP@0.5,具有良好的实用价值。通过针对性的数据增强和模型优化,系统能够在复杂的城市环境中准确识别共享单车,为智慧城市建设和共享单车管理提供了有力的技术支撑。
项目代码结构清晰,易于扩展和部署,为后续的产业化应用奠定了坚实基础。随着数据集的不断扩充和算法的持续优化,该系统有望在更广泛的场景中发挥重要作用。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号