
05. 感知机
一、感知机
感知机(Perceptron)是二分类模型,它接收多个信号,输出一个信号。感知机的信号只有 0、1 两种取值。
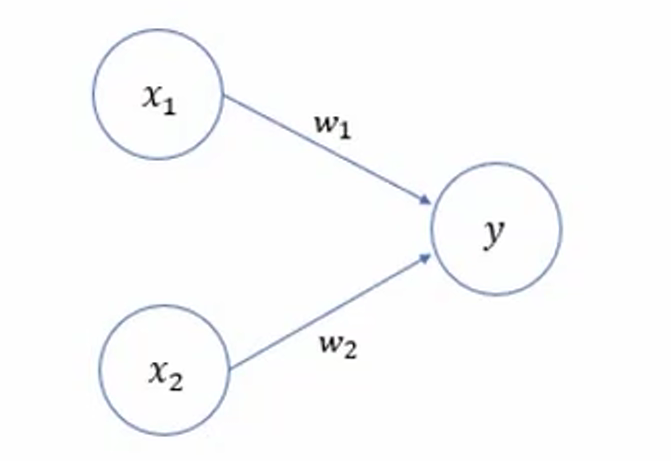
其中,\(x_{1}\)、 \(x_{2}\) 是 输入信号,y 是 输出信号,\(w_{1}\)、\(w_{2}\) 是 权重,\(\circ\) 称为 神经元 或 节点。输入信号被送往神经元时,会分别乘以固定的权重。神经元会计算传入过来的信号总和,只有当这个总和超过某个界限值时才会输出 1,也称为 神经元被激活。这里将界限值称为阈值 \(\theta\)。
感知机的多个输入信号都有各自的权重,这些权重发挥着控制各个信号的重要性的作用,权重越大,对应信号的重要性越高。
二、简单逻辑电路
2.1、与门
与门是具有两个输入和一个输出的门电路,仅在两个输入均为 1 时输出 1,其它时候输出 0。这种输入信号和输出信号对应表称为真值表。
| \(x_{1}\) | \(x_{2}\) | \(y\) |
|---|---|---|
| 0 | 0 | 0 |
| 1 | 0 | 0 |
| 0 | 1 | 0 |
| 1 | 1 | 1 |
使用感知机表示与门需要确定能满足上述真值表的 \(w_{1}\)、\(w_{2}\)、\(\theta\) 的值,满足条件的参数有无数个,如 \((w_{1}, w_{2}, \theta) = (0.5, 0.5, 0.7)\)。
def AND(x1, x2):
w1, w2, theta = 0.5, 0.5, 0.7
result = x1*w1 + x2*w2
return 1 if result > theta else 0
print(AND(0, 0))
print(AND(1, 0))
print(AND(0, 1))
print(AND(1, 1))
后面为了方便使用向量或矩阵,我们按照线性方程的方式转换为另一种形式,将 \(\theta\) 换成 -b(偏置),表示感知机的公式变为如下格式:
我们可以在终端中使用 pip 安装 Numpy。默认是从国外的主站上下载,因此,我们可能会遇到网络不好的情况导致下载失败。我们可以在 pip 指令后通过 -i 指定国内镜像源下载。
pip install numpy -i https://mirrors.aliyun.com/pypi/simple
国内常用的 pip 下载源列表:
- 阿里云 https://mirrors.aliyun.com/pypi/simple
- 中国科技大学 https://pypi.mirrors.ustc.edu.cn/simple
- 清华大学 https://pypi.tuna.tsinghua.edu.cn/simple
- 中国科学技术大学 http://pypi.mirrors.ustc.edu.cn/simple
import numpy as np
def AND(x1, x2):
x = np.array([x1, x2])
w = np.array([0.5, 0.5])
b = -0.7
result = w @ x + b
return 1 if result > 0 else 0
print(AND(0, 0))
print(AND(1, 0))
print(AND(0, 1))
print(AND(1, 1))
2.2、或门
或门是具有两个输入和一个输出的门电路,只要有一个输入为 1 时输出 1,其它时候输出 0。这种输入信号和输出信号对应表称为真值表。
| \(x_{1}\) | \(x_{2}\) | \(y\) |
|---|---|---|
| 0 | 0 | 0 |
| 0 | 1 | 1 |
| 1 | 0 | 1 |
| 1 | 1 | 1 |
使用感知机表示与门需要确定能满足上述真值表的 \(w_{1}\)、\(w_{2}\)、\(\theta\) 的值,满足条件的参数有无数个,如 \((w_{1}, w_{2}, \theta) = (0.5, 0.5, 0)\)。
import numpy as np
def OR(x1, x2):
x = np.array([x1, x2])
w = np.array([0.5, 0.5])
b = -0.2
result = w @ x + b
return 1 if result > 0 else 0
print(OR(0, 0))
print(OR(1, 0))
print(OR(0, 1))
print(OR(1, 1))
2.3、与非门
与非门是具有两个输入和一个输出的门电路,仅在两个输入均为 1 时输出 0,其它时候输出 1。这种输入信号和输出信号对应表称为真值表。
| \(x_{1}\) | \(x_{2}\) | \(y\) |
|---|---|---|
| 0 | 0 | 1 |
| 0 | 1 | 1 |
| 1 | 0 | 1 |
| 1 | 1 | 0 |
使用感知机表示与门需要确定能满足上述真值表的 \(w_{1}\)、\(w_{2}\)、\(\theta\) 的值,满足条件的参数有无数个,如 \((w_{1}, w_{2}, \theta) = (-0.5, -0.5, -0.7)\)。
import numpy as np
def NAND(x1, x2):
x = np.array([x1, x2])
w = np.array([-0.5, -0.5])
b = 0.7
result = w @ x + b
return 1 if result > 0 else 0
print(NAND(0, 0))
print(NAND(1, 0))
print(NAND(0, 1))
print(NAND(1, 1))
三、多层感知机
异或门是具有两个输入和一个输出的门电路,当两个输入相同时输出 0,不同时输出 1。这种输入信号和输出信号对应表称为真值表。
| \(x_{1}\) | \(x_{2}\) | \(y\) |
|---|---|---|
| 0 | 0 | 0 |
| 0 | 1 | 1 |
| 1 | 0 | 1 |
| 1 | 1 | 0 |
我们结合感知机公式和异或门的真值表可得:
上述的公式无法同时满足,因此我们无法使用一个感知机实现异或门。我们可以用多层感知机实现异或门。
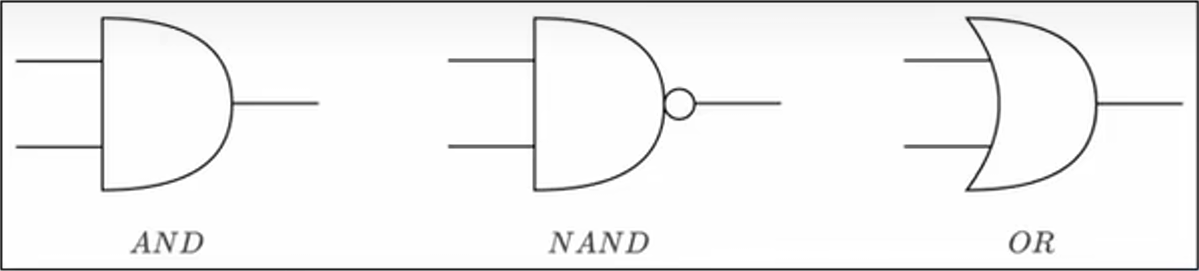
与门与非门或门符号表示:
我们可以将它们组合实现一个异或门。
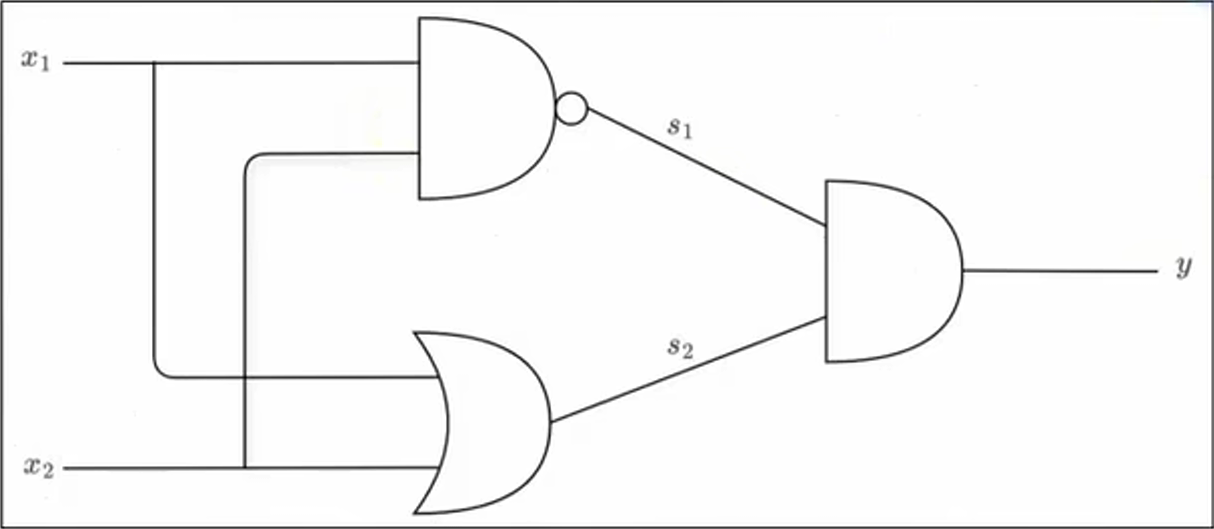
| \(x_{1}\) | \(x_{2}\) | \(s_{1}\) | \(s_{2}\) | \(y\) |
|---|---|---|---|---|
| 0 | 0 | 1 | 0 | 0 |
| 0 | 1 | 1 | 1 | 1 |
| 1 | 0 | 1 | 1 | 1 |
| 1 | 1 | 0 | 1 | 0 |
import numpy as np
def AND(x1, x2):
x = np.array([x1, x2])
w = np.array([0.5, 0.5])
b = -0.7
result = w @ x + b
return 1 if result > 0 else 0
def OR(x1, x2):
x = np.array([x1, x2])
w = np.array([0.5, 0.5])
b = -0.2
result = w @ x + b
return 1 if result > 0 else 0
def NAND(x1, x2):
x = np.array([x1, x2])
w = np.array([-0.5, -0.5])
b = 0.7
result = w @ x + b
return 1 if result > 0 else 0
def XOR(x1, x2):
s1 = NAND(x1, x2)
s2 = OR(x1, x2)
y = AND(s1, s2)
return y
print(XOR(0, 0))
print(XOR(1, 0))
print(XOR(0, 1))
print(XOR(1, 1))
一层感知机的局限性在于它只能由一条直线划分的空间。由直线划分的空间的称为 线性空间,由曲线划分的空间称为 非线性空间。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号