
008-发那科机器人工件、工具坐标系创建
工业机器人的工具坐标系:
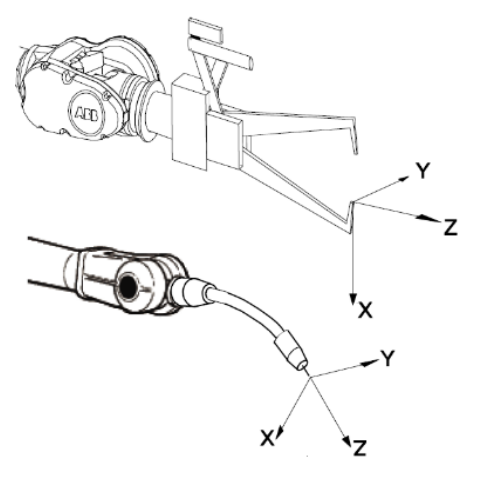
工具坐标系是用来定义工具中心点(TCP)的位置和工具姿态的坐标系。工具坐标系将工具中心点设为零 位,由此定义工具的位置和方向。
创建工业机器人工具坐标系:
创建工业机器人工具坐标系,有6种方法,分别是三点法、六点法(XZ)、六点法(XY)、二点+Z、四点 法、直接输入法,这边我们以三点法和四点法为例来介绍如何创建工业机器人的工具坐标系。
(1)运用三点法来创建工业机器人的工具坐标系:
1)点击示教器上的“MENU(菜单)”按钮,找到“设置”选择里面“坐标系”然后按下示教器上 “ENTER(确定)”按钮,
2)进入设置坐标系画面,然后选择坐标系,点击示教器上的“F3(坐标)” 按钮,选择“工具坐标系”然后按下示教器上“ENTER(确定)”按钮。

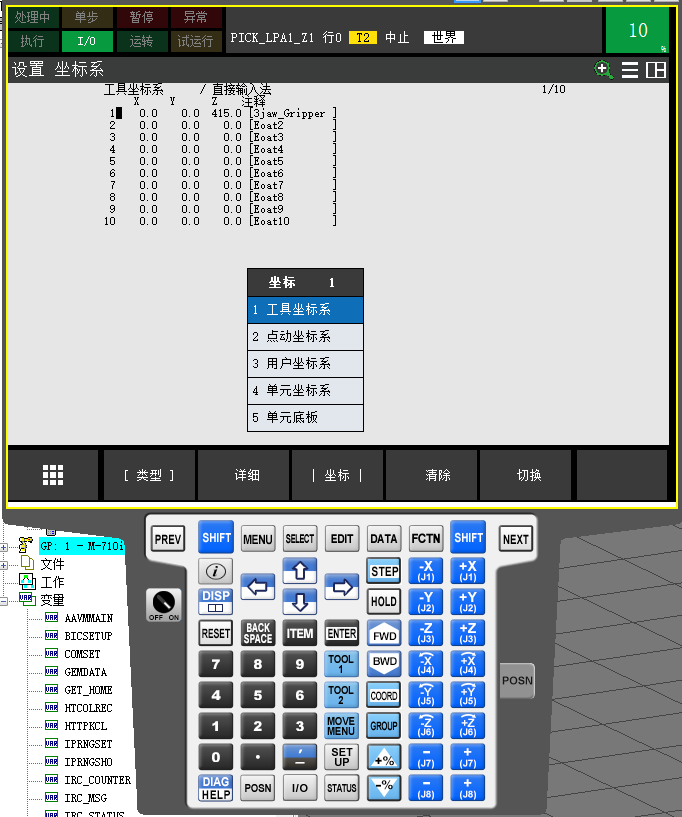
3)进入工具坐标系画面。
4)这边可以创建10个工具坐标系,我们选择工具坐标系1,点击示教器上的 “F2(详细)”按钮。

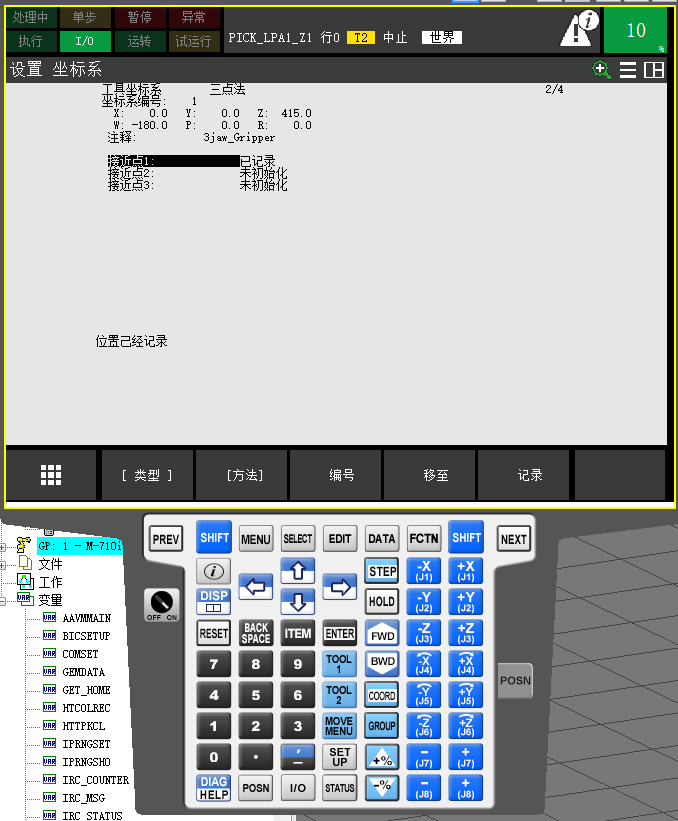
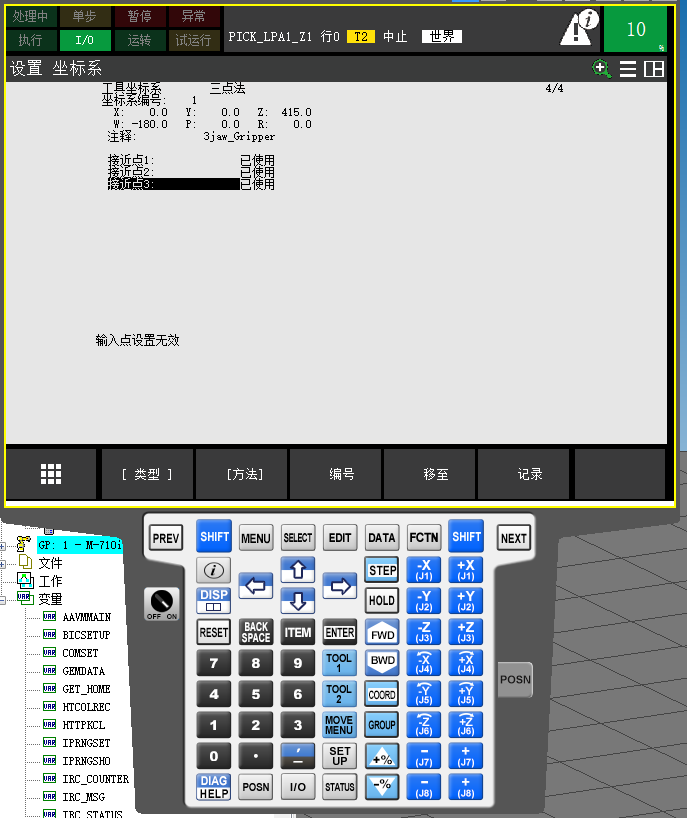
5)点击示教器上的“F2(方法)”按钮,选择三点法,6)进入三点法创建工具坐标系设定画面。

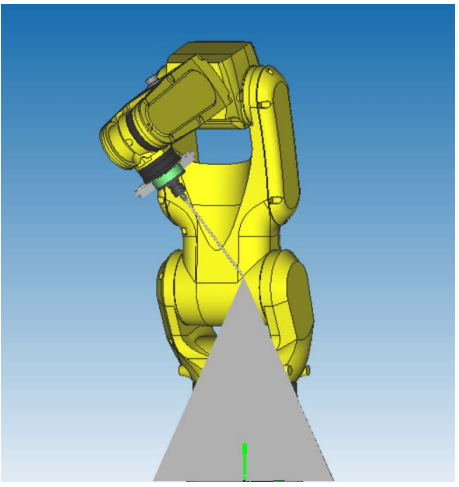
7)选择合适的手动操纵模式,操纵工业机器人需要设定tcp的工具移动到固定点。8)选择示教器上的接 近点1,按住示教器上的“SHIFT”和“F5(记录)”记录接近点1。
9)选择合适的手动操纵模式,操纵工业机器人需要设定tcp的工具以另外一种姿态移动到固定点。10)选 择示教器上的接近点2,按住示教器上的“SHIFT”和“F5(记录)”记录接近点2。
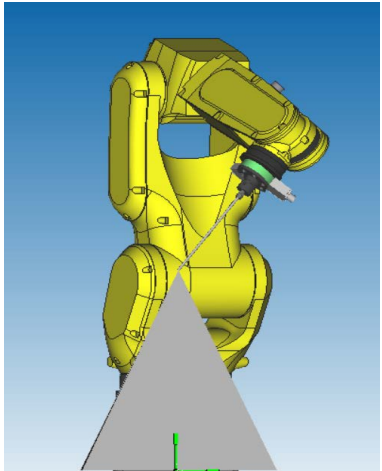
11)选择合适的手动操纵模式,操纵工业机器人需要设定tcp的工具以另外一种姿态移动到固定点。12) 选择示教器上的接近点3,按住示教器上的“SHIFT”和“F5(记录)”记录接近点3,当全部点都记录完 成后,系统自动生成TCP数据
工业机器人的用户坐标系:
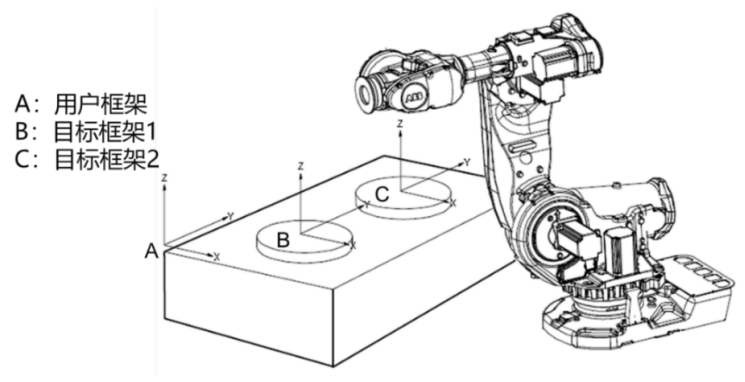
(1)用户坐标系的定义:用户坐标系是拥有特定附加属性的坐标系。它主要用于简化编程,新的用户 坐标系都是基于默认的用户坐标系变化得到的工业机器人可以有多个用户坐标系,来表示不同的工件, 或表示同一工件在不同位置的若干副本。
创建工业机器人用户坐标系:
创建工业机器人用户坐标系,有3种方法,分别是三点法、四点法、直接输入法,这边我们以三点法为例 来介绍如何用三点法创建工业机器人的用户坐标系。
(1)点击示教器上的“MENU(菜单)”按钮,找到“设置”选择里面“坐标系”然后按下示教器上 “ENTER(确定)”按钮,
(2)进入设置坐标系画面,然后选择坐标系,点击示教器上的“F3(坐标) ”按钮,选择“用户坐标系”然后按下示教器上“ENTER(确定)”按钮。


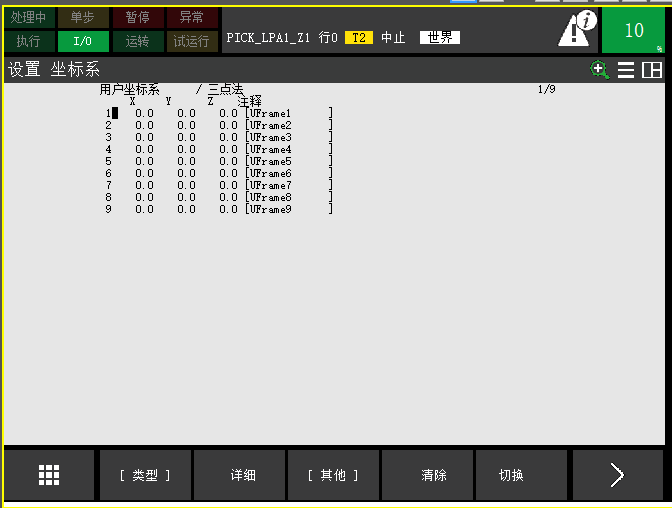
(3)进入用户坐标系画面。
(4)这边可以创建9个用户坐标系,我们选择用户坐标系1,点击示教器上 的“F2(详细)”按钮。
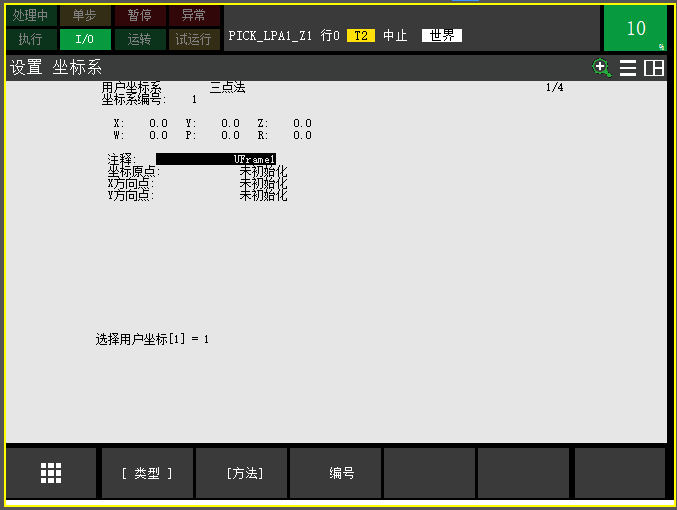
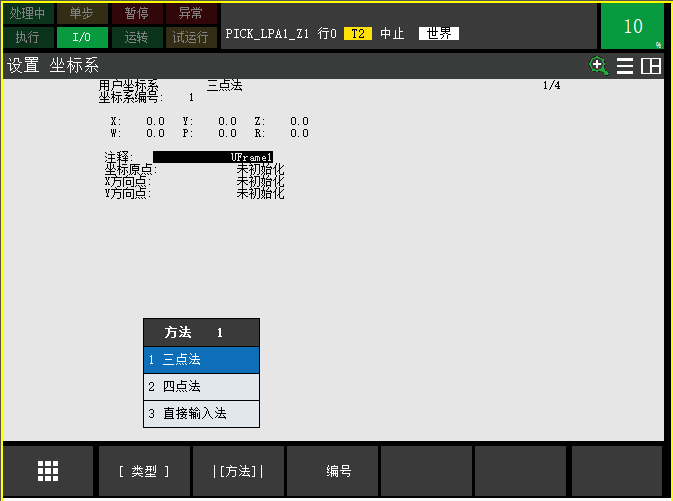
(5)点击示教器上的“F2(方法)”按钮,选择三点法。
(6)进入三点法创建用户坐标系设定画面。
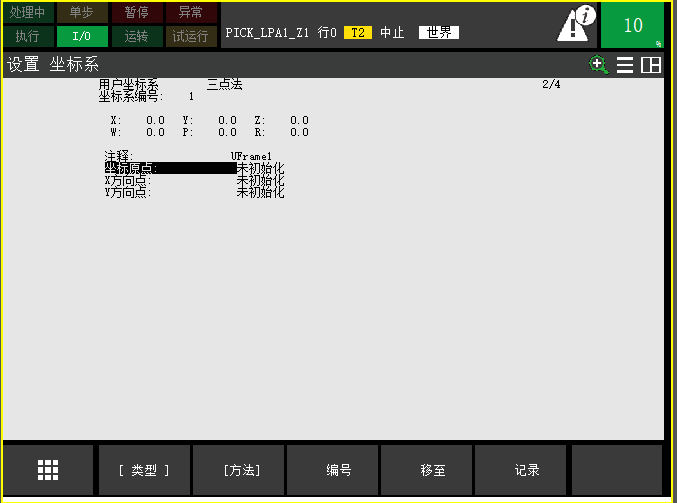
(7)选择合适的手动操纵模式,操纵工业机器人的工具移动到需要创建用户坐标系的坐标原点位置。
(8)选择示教器上的坐标原点,按住示教器上的“SHIFT”和“F5(记录)”记录坐标原点。

(9)选择合适的手动操纵模式,操纵工业机器人的工具移动到需要创建用户坐标系的X方向点位置。
(10)选择示教器上的X方向点,按住示教器上的“SHIFT”和“F5(记录)”记录X方向点。

(11)选择合适的手动操纵模式,操纵工业机器人的工具移动到需要创建用户坐标系的Y方向点位置 。(12)选择示教器上的Y方向点,按住示教器上的“SHIFT”和“F5(记录)”记录Y方向点,当全部点都 记录完成后,系统自动生成用户坐标系数据。

