006-发那科机器人TP程序备份
1、文件的类型
文件,是机器人控制器中作为数据存储在SRAM中的存储单位。主要的文件类型有:程序文件、标准指令文件、系统文件、数据文件。
(1)程序文件
程序文件,是记述有被称作程序指令的一连串向机器人发出的指令的文件。程序指令进行机器人的动作和外围设备控制、各应用程序控制。
(2)标准指令文件
标准指令文件,存储程序编辑画面上的分配给各功能键—(F1~F4键)的标准指令语句的设定。
(3)系统文件
系统文件是将为运行应用工具软件的系统的控制程序或在系统中使用的数据存储起来的文件。
有如下种类:
- 1)SYSVARS.SV 存储参考位置、关节可动范围、制动器控制等系统变量的设定。
- 2)SYSFRAME.SV 存储坐标系的设定
- 3)SYSSERVO.SV 存储伺服参数的设定
- 4)SYSMAST.SV 存储零点标定的数据
- 5)SYSMACRO.SV 存储宏指令的设定
- 6)FRAMEVAR.VR 存储为进行坐标系设定而使用的参照点、注解等数据。坐标系的数据本身,被存储在SYSFRAME.SV中。
(4)数据文件
数据文件(*.VR、*.I/O、*.DT),是用来存储系统中所使用的数据的文件。
数据文件有如下几类。
- 1)数据文件(*.VR)
- -MUMREG.VR 存储数值寄存器的数据。 -POSREG.VR 存储位置寄存器的数据。-STRREG.VR 存储字符串寄存器的数据。-PALREG.VR 存码垛寄存器的数据。(仅限使用码垛寄存器选项时)
- 2) I/O分配数据文件(*.I/O)-DI/OCFGSV.I/O 存储I/O分配的设定。
- 3) 机器人设定数据文件(*.DT)存储机器人设定画面上的设定内容,文件名因不同机型而有所差异
(5)ASCII文件
ASCII文件,是采用ASCII格式的文件。要载入ASCII文件,需要有ASCII程序载入功能选项。可通过电脑等设备进行ASCII文件的内容显示和打印。
2、文件的输入/输出装置
机器人控制装置可以使用不同类型的文件输入/输出装置。
一般我们使用TP示教器上的USB接口进行文件的备份与加载,需要按照如下步骤进行文件输入/输出装置的切换。
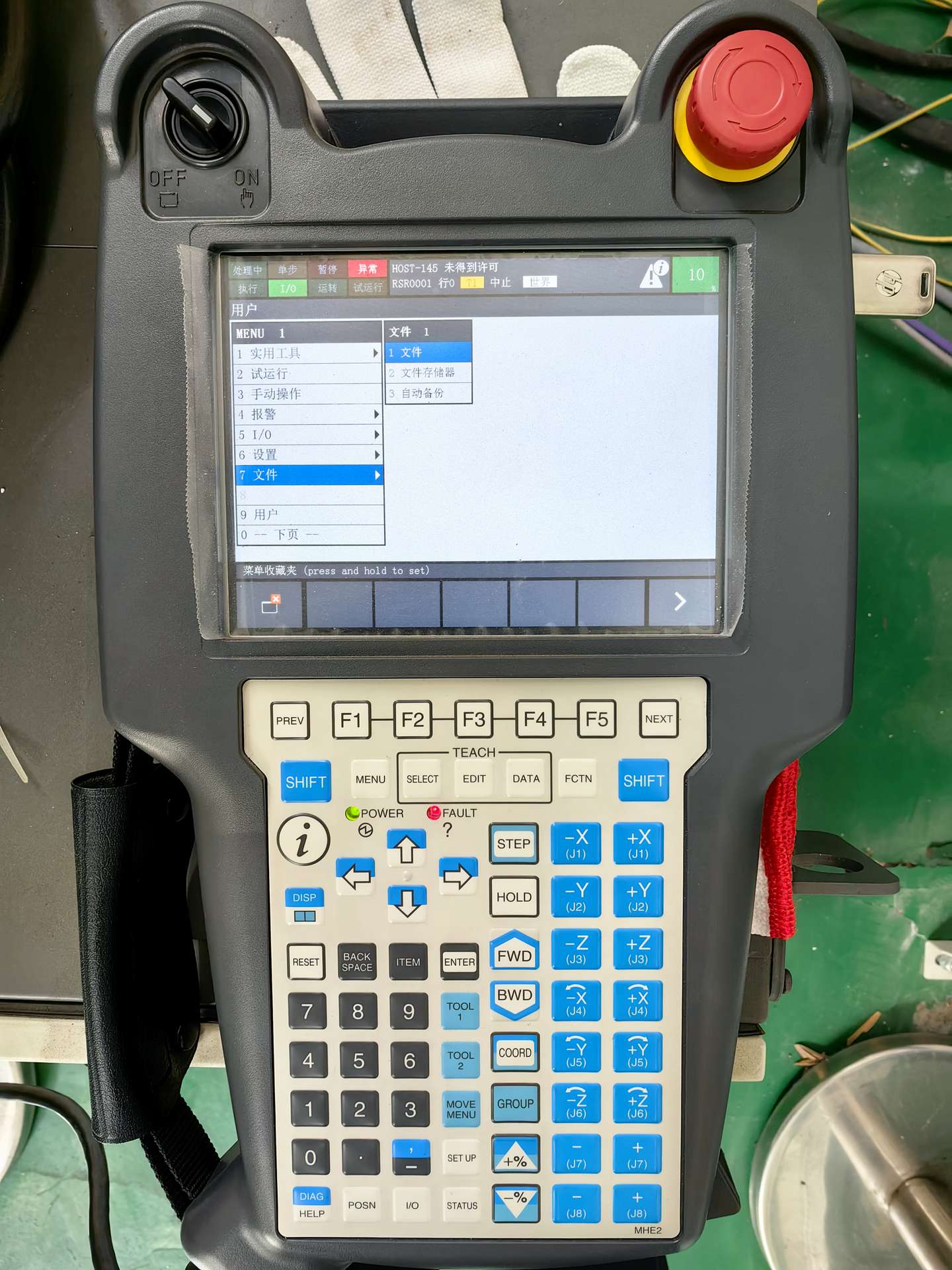
(1)依次按键操作:【MENU】(菜单)—FILE(文件);
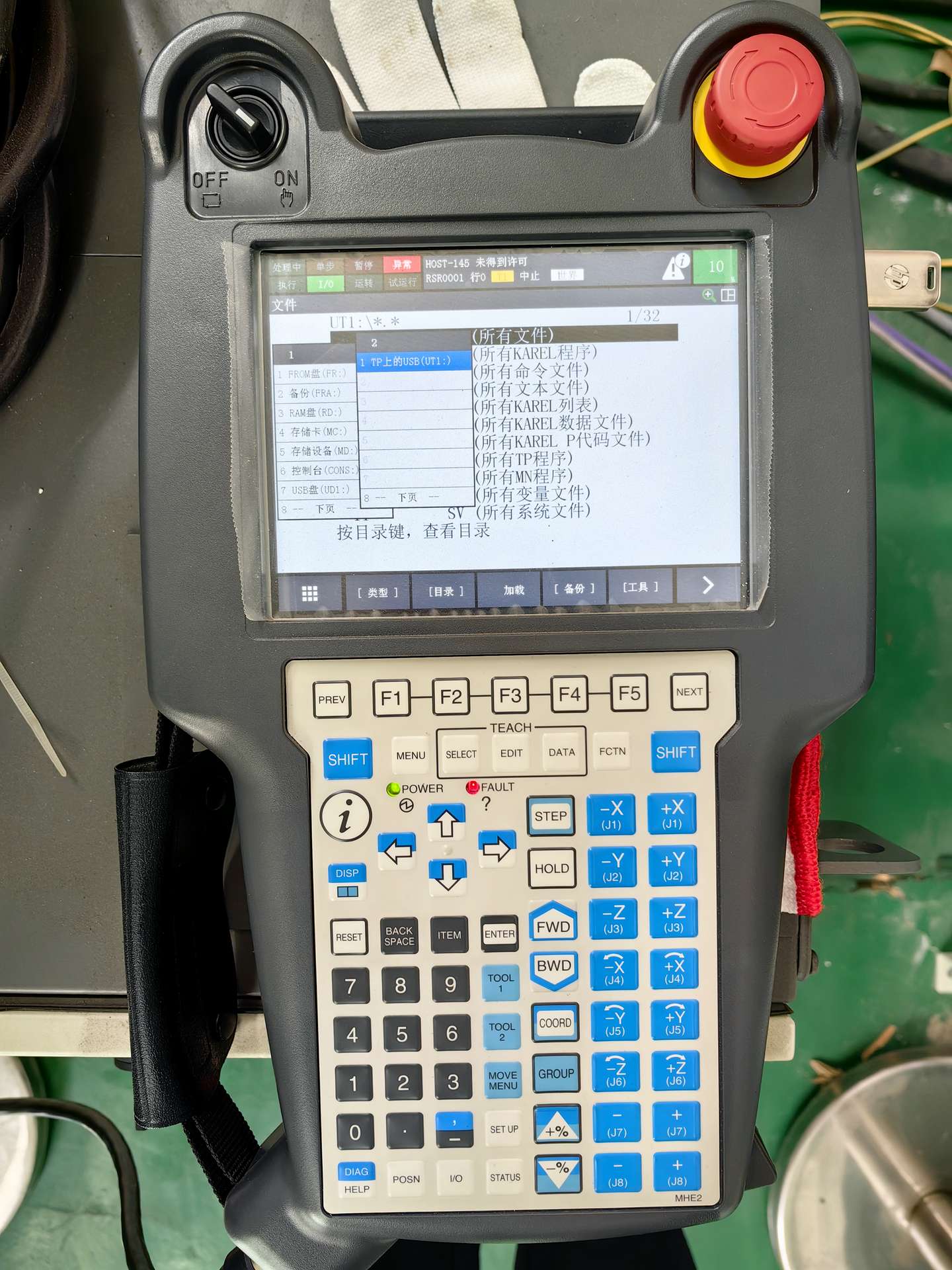
(2)按【F5】UTIL(工具),移动光标至SetDevice(切换设备)
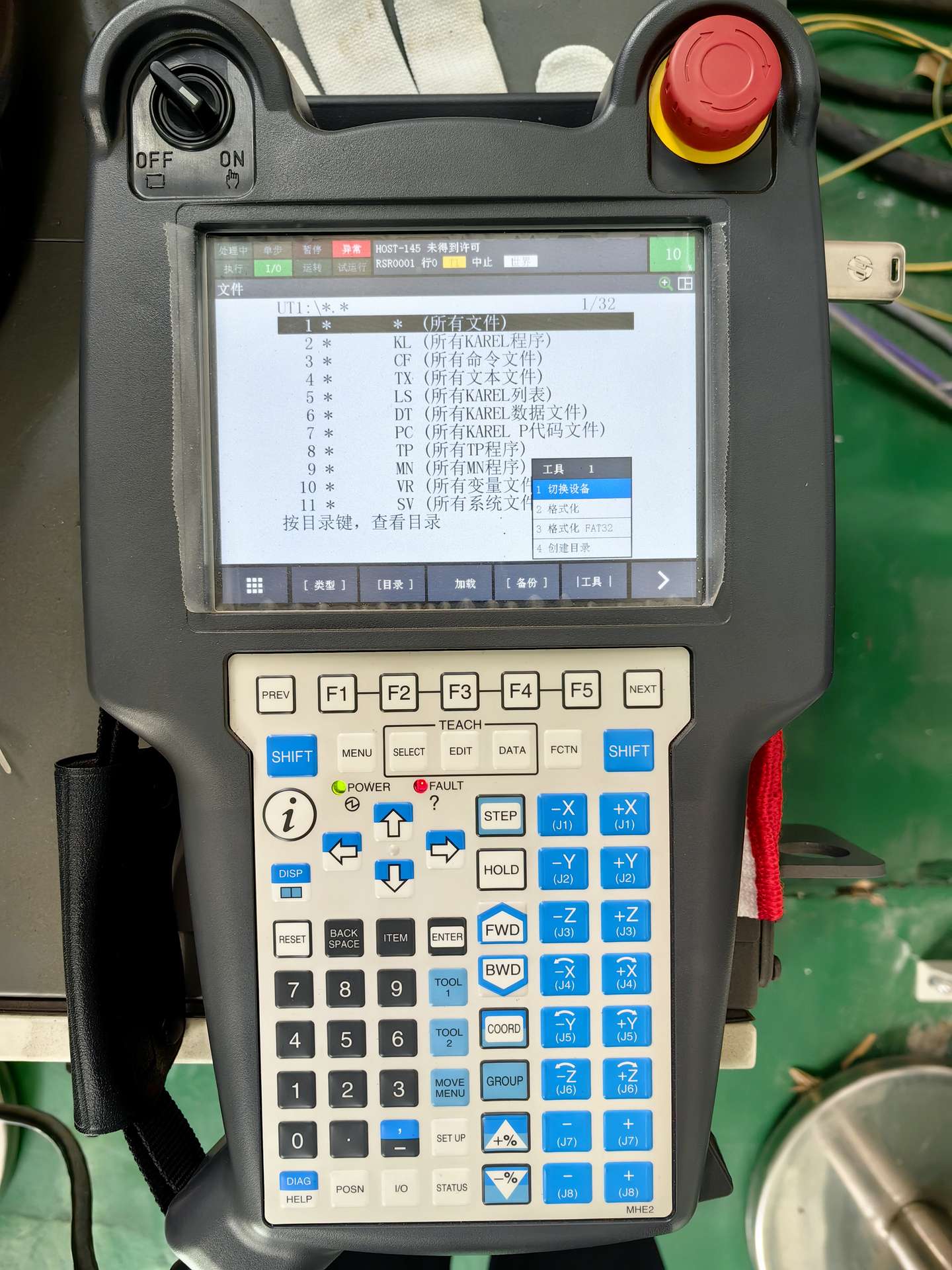
(3)存储装置选择UT1。
FROM盘(FR:)
在没有后备电池的状态下,可在电源断开时保存信息的存储区域。根目录中保存有对系统来说极为重要的数据,虽然可以在本存储装置中保存程序等的备份和任意的文件,但是请勿进行向根目录的保存或删除等操作。要进行保存时,务必创建子目录,将其保存在子目录中。
备份(FRA:)
这是通过自动备份来保存文件的区域。可以在没有后备电池的状态下,在电源断开时保持信息。
RAM盘(RD:)
为特殊功能而提供的存储装置。请勿使用本存储装置。
存储器设备(MD:)
存储器设备,是可以将机器人程序和KAREL程序等控制装置的存储器上的数据作为文件进行处理的设备。
控制台(CONS:)
这是维修专用的设备。可以参照内部信息的日志文件。
USB存储器(UD1:)
这是安装在操作面板上的USB端口上的USB存储器。
USB存储器(UT1:)
这是安装在新型示教器上的USB端口上的USB存储器。
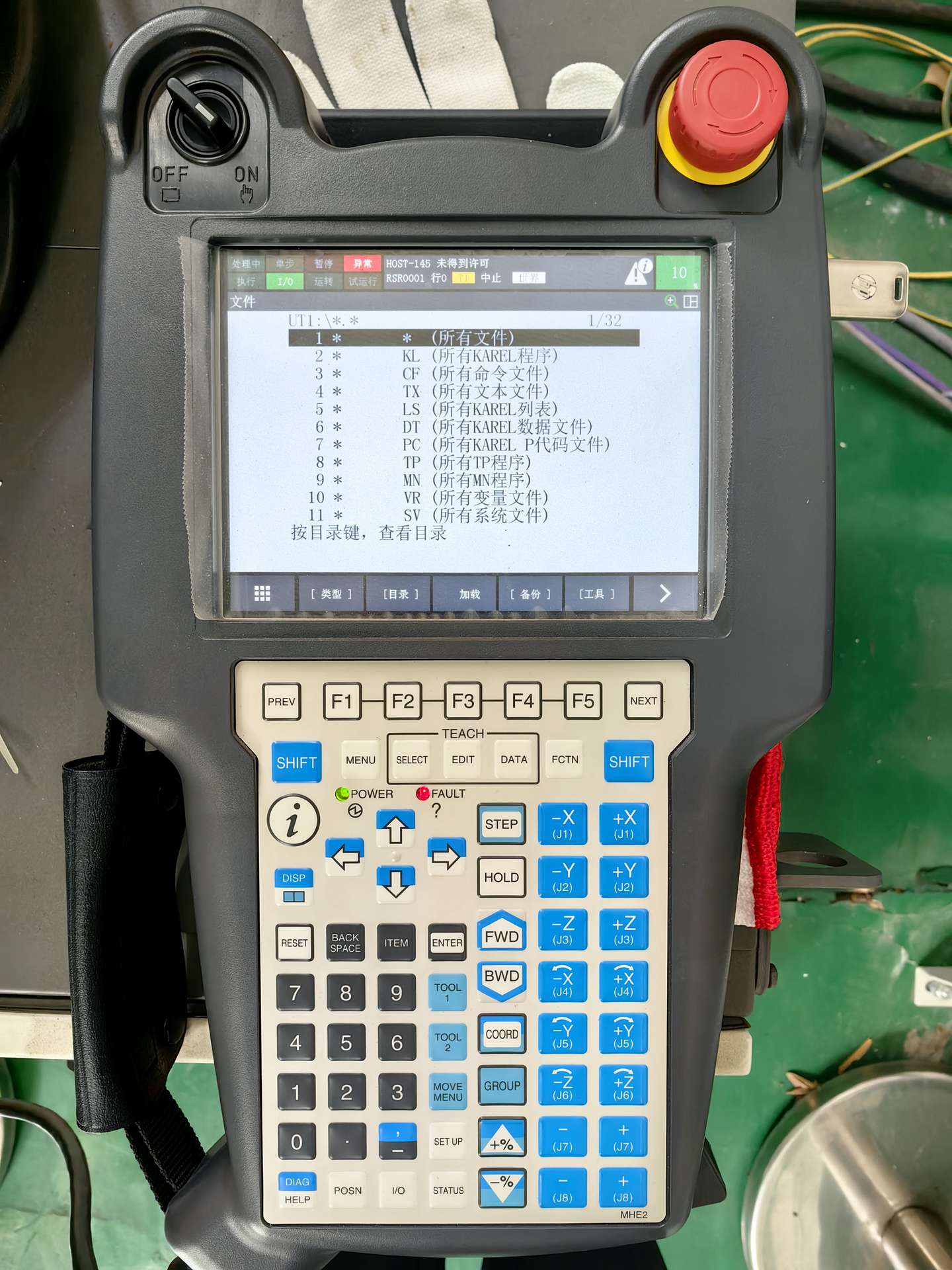
3、文件备份方法将16GB以下的U盘插入示教器上的USB端口,完成如下操作。
依次按键操作
(1)【MENU】(菜单)—FILE(文件);
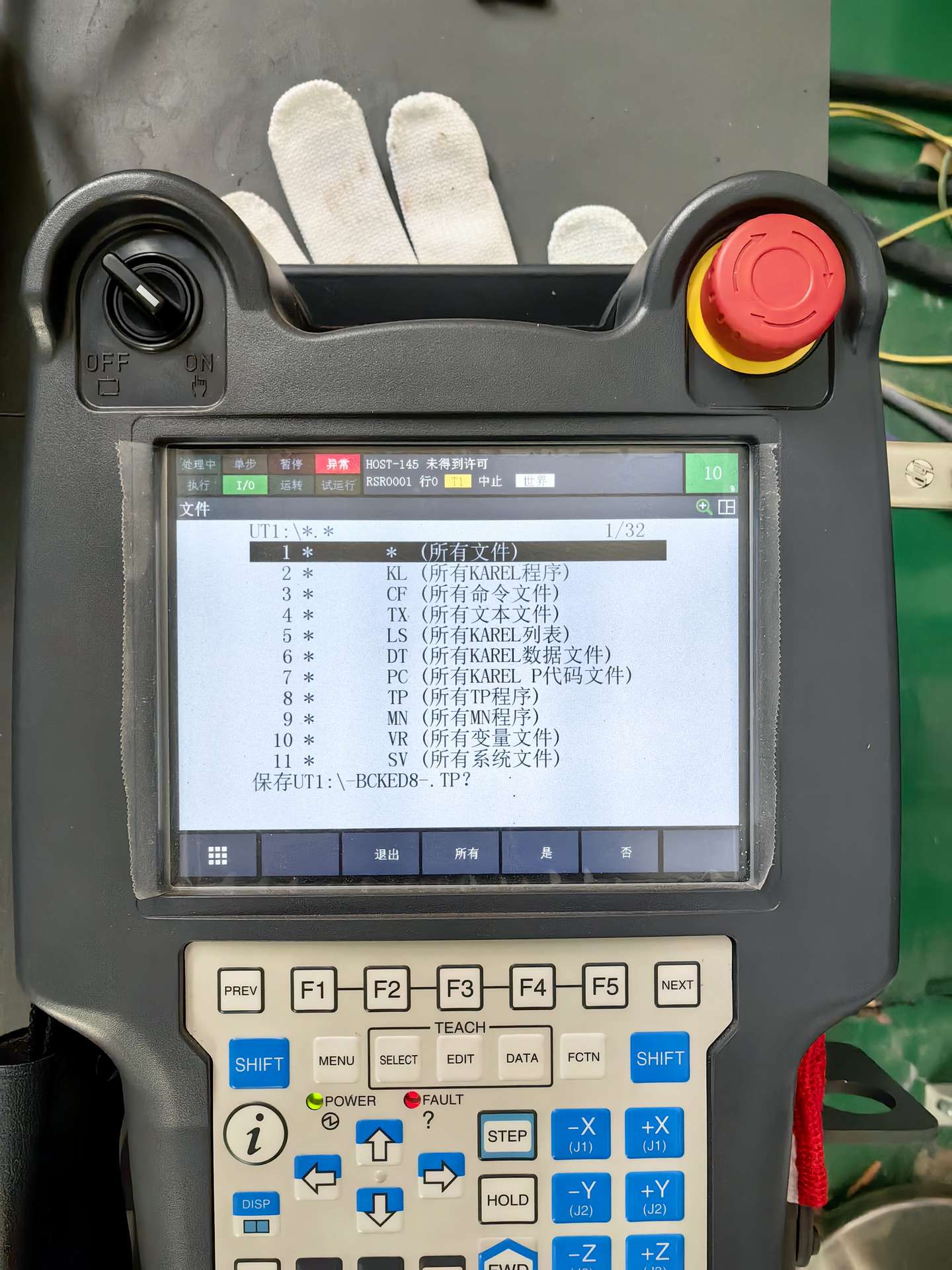
(2)按【F4】BACKUP(备份),选择TPprograms(TP程序)
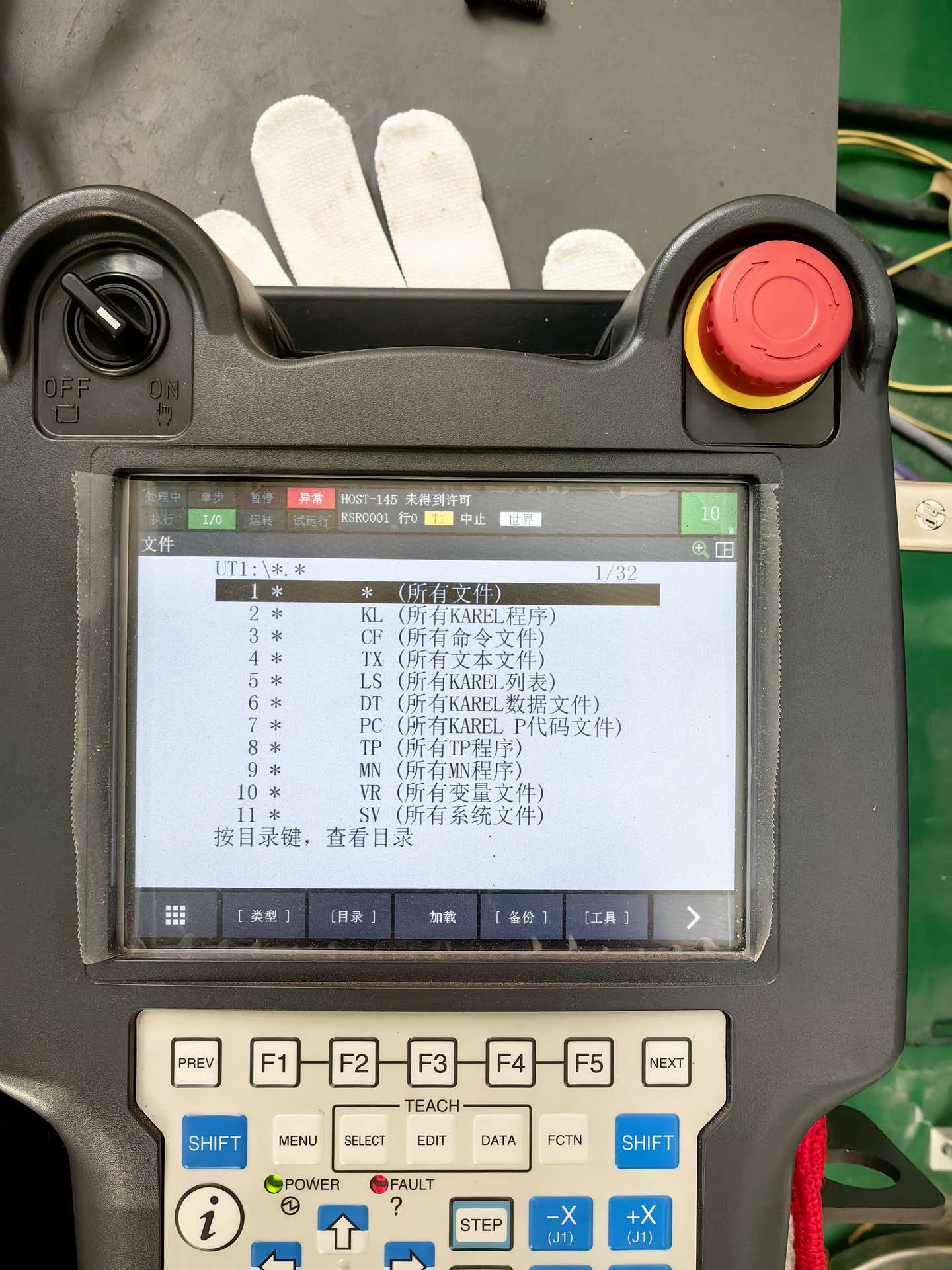

(3)按【F3】ALL(所有),程序文件即被保存起来;