Lecture02_向量与线性代数_GAMES101 课堂笔记——2020.2.14
一、向量(Vectors)
向量表示示意图:

- 有序实数组,用以表示在不同坐标轴上的投影长度
- 有行和列两种表达方式,在图形学中常以列表达
- 代表了一个有方向的长度
- 基本运算:
- 加法(满足结合律和交换律)
- 标量乘以向量(满足结合律和分配率)
- 点乘(内积,结果为标量,几何意义是 [公式] ,满足分配率和交换律,可用于判断两向量夹角,求向量长度,计算投影等)
- 叉乘(外积,结果为向量,垂直于原向量构建的平面,长度为 [公式] ,交换叉乘中两向量的位置,会得到长度相同但方向相反的向量)
- 向量归一化:p的归一化向量q与p方向相同,长度为1,可通过点乘算出
(一)向量归一化
向量长度表示:\(||\vec a||\)
单位向量:
- 长度 = 1
- 计算公式:
- 可用于代表方向
(二)向量相加
向量相加示意图:
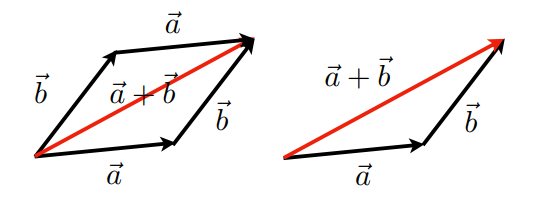
- 几何:遵守平行法则、三角法则
- 代数上:坐标相加
(三)笛卡尔积
向量相加示意图:
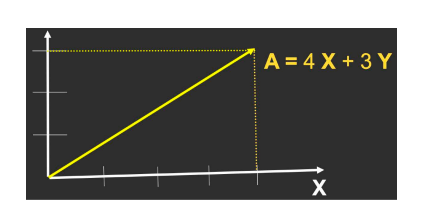
X和Y可以是任何(通常是正交的单位)向量,
\(A = {x \choose y }\) \(A^T = \left(x,y \right )\) \(||A|| = \sqrt{x_2+y_2}\)
(四)向量相乘
1. 点乘
向量点乘示意图:
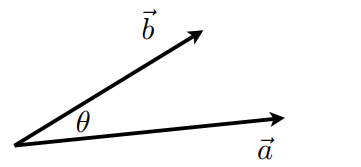
\(\vec a \cdot \vec b = \left\| \vec a \right\| \left\| \vec b \right\| \cos \theta\) \(\cos \theta = \frac{\vec a \cdot \vec b}{\left\| \vec a \right\| \left\| \vec b \right\|}\)
对于单位向量:\(\cos \theta = \hat a \cdot \hat b\)
(1)点乘性质
\(\vec a \cdot \vec b = \vec b \cdot \vec a\)
\(\vec a \cdot \left( \vec b + \vec c \right) = \vec a \cdot \vec b + \vec a \cdot \vec c\)
\(\left( k \vec a \right) \cdot \vec b = \vec a \cdot \left( k \vec b \right) = k \left( \vec a \cdot \vec b \right)\)
(2)在笛卡尔坐标系中做点积
组合相乘,然后相加。
- 二维坐标系
- 三维坐标系
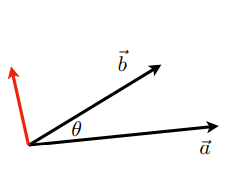
(3)投影点积
示意图:
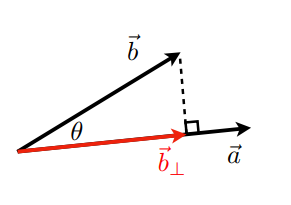
- \(\vec b_\bot\):\(\vec b\)在\(\vec a\)上的投影
- \(\vec b_\bot\)必须属于\(\vec a\)(或者属于\(\hat a\))
- \(\vec b_\bot = k \vec a\)
- 求k的值
- \(k = \left\| \vec b_\bot \right\| \cos \theta\)
- \(\vec b_\bot\)必须属于\(\vec a\)(或者属于\(\hat a\))
(4)图形学中的点乘
- 求两个向量的夹角,(例如:光源与表面夹角的余弦值)
- 求一个向量在另一个向量上的投影
应用
测量两个向量的方向
1)在一个圆中

例如,图中\(\vec a \cdot \vec b >0\)属于前向(forward),\(\vec a \cdot \vec c <0\)属于后向(backward)
2)两个向量之间

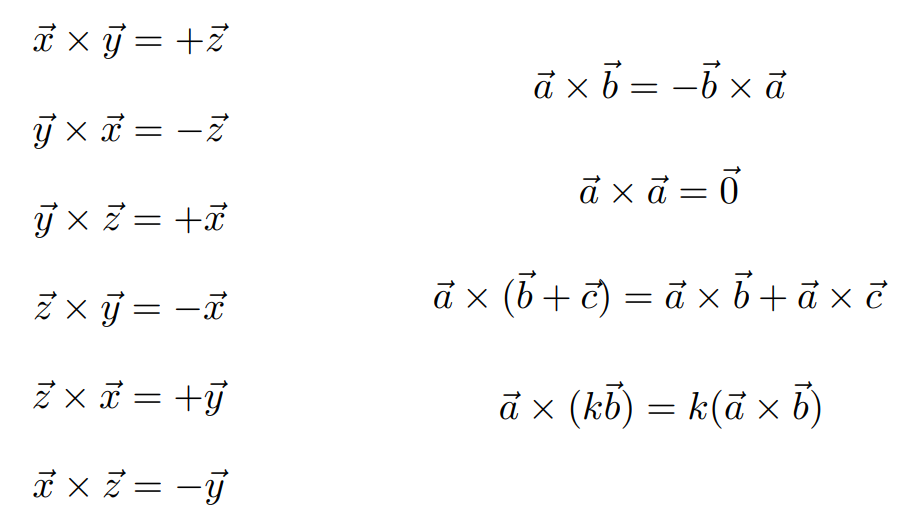
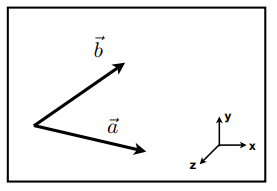
(四)向量叉乘(Cross product)
向量叉乘示意图:

- 叉乘正交于两个原始向量
- 方向遵循右手法则,(一般默认是右手法则,即:\(\vec x \times \vec y = + \vec z\),但是OpenGL默认是左手法则,即:\(\vec x \times \vec y = - \vec z\))
- 可用于构建坐标系
1. 叉乘性质
2. 叉乘:笛卡尔法则

3. 图形学中的叉乘
-
决定方向:左 or 右
![]()
两个向量进行叉乘,比如:\(\vec a \times \vec b >0\),所以,\(\vec a\)在\(\vec b\)的顺时针方向(也为:右边);\(\vec b \times \vec a <0\),所以,\(\vec b\)在\(\vec a\)的逆时针方向(也为:左边),如果\(\vec b \times \vec a = 0\),那么\(\vec a\)则与\(\vec b\)共线。后期如果更为细致,还可以用在游戏中判断两个物体的具体方位,比如以自身正对的方向,判断敌人是在自己的左上、左下、右上、右下等位置 -
判断内部 or 外部
![]()
如上图,若\(P\)点在三角形内部,则从同一个端点出发的边(eg:\(\vec{AB}\))与到\(P\)点的向量(eg:\(\vec{AP}\)),按此顺序判断(即边向量顺序连接),则P点只会在三条边的同一个方向;若在外部,P点相对于三个边的位置将不一致。
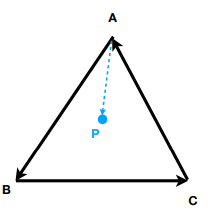
注:即使A、B、C调换顺序,按照首尾连接,效果一致。此方法可应用在光线追踪中。
- 建立坐标系
![]()
叉乘后的另一个向量必定与原来两个向量垂直。
(五)标准正交基和坐标系(Orthonormal bases and coordinate frames)
1. 用途
- 对于表示点、位置、位置非常重要
- 通常有很多坐标系
- 全球、本地、世界、模型、模型部分(头,手,…)
- 关键问题是在这正交基和坐标系之间进行转换(见Lecture03笔记)
2. 直角坐标系
定义一个三维直角坐标系\((u,v,w)\):
\(\left\| \vec u \right\| = \left\| \vec v \right\| = \left\| \vec w \right\| = 1\)
\(\vec u \cdot \vec v = \vec v \cdot \vec w = \vec u \cdot \vec w = 0\)
\(\vec w = \vec u \times \vec v\) (右手法则)
\(\vec p = \left( \vec p \cdot \vec u \right) + \left( \vec p \cdot v \right) \vec v + \left( \vec p \cdot \vec w \right) \vec w\)(projection)
二、矩阵(Matrix)
在图形学中,广泛用于变换、旋转、剪切、缩放等(详见Lecture03笔记)
- 矩阵&标量值相乘/相加:每个元素相乘/相加。
- 矩阵&矩阵相乘:\(\left(M \times N \right) \left( N \times P \right)\),要求前一个的列数 = 后一个矩阵的行数。
矩阵&向量 相乘
- 把向量当做一个列矩阵\(\left( m \times \right)\)
- 关于y轴的2D反射
1. 矩阵转置
-矩阵转置的性质
2.单位矩阵和逆变换
\(I_{3 \times 3} = \begin{pmatrix} 1 & 0 & 0 \\ 0 & 1 & 0 \\ 0 & 0 & 1 \end{pmatrix}\)
\(AA^{-1} = A^{-1}A = I\)
\(\left( AB \right)^{-1} = B^{-1}A^{-1}\)
3. 矩阵形式中的向量相乘
- 点乘:
- 叉乘:

 浙公网安备 33010602011771号
浙公网安备 33010602011771号