
基于Astar的复杂栅格地图路线规划算法matlab仿真
1.程序功能描述
基于Astar的复杂栅格地图路线规划算法。在机器人导航、自动驾驶、游戏开发等众多领域,路径规划是一个核心问题。复杂栅格地图是对现实环境的一种离散化表示,其中每个栅格代表一定的空间区域,具有不同的属性,如可通行性、障碍物分布等。基于 A * 算法的路线规划能够在这样的栅格地图中快速、有效地找到一条从起始位置到目标位置的近似最优路径,在保证路径质量的同时提高搜索效率,具有重要的理论与实际应用价值。
2.测试软件版本以及运行结果展示
MATLAB2022A版本运行

3.核心程序
% 计算最优路径
pointIndex = Pe_xy;
pathPoints = []; % 存放最优路径
while any(pointIndex~=P0_xy) % 回溯到起始栅格点时,找到最优路径
pathPoints(end+1,:) = (pointIndex-0.5)*Wg+[Xmin,Ymin]; % 把栅格距离转换为实际距离,这样的写法类似vector的push_back,也可以写成pathPoints=[pathPoints;xxxxx],注意需前面必须要出现这个变量才能这么使用
xi = Grids(pointIndex(1),pointIndex(2),1); % pointIndex的父节点的行坐标
yi = Grids(pointIndex(1),pointIndex(2),2); % pointIndex的父节点的列坐标
pointIndex = [xi, yi]; % 原来pointIndex的父节点栅格坐标
end
pathPoints(end+1,:) = (pointIndex-0.5)*Wg+[Xmin,Ymin]; % 把起始栅格点加入路径中
% 画图
start = (P0_xy - 0.5)*Wg+[Xmin,Ymin]; % 将start_i栅格坐标转换为实际坐标
figure;
hold on;
grid on
xlabel('x/m');
ylabel('y/m');
% 绘制障碍栅格地图,实际坐标不用修改,栅格坐标需要反转下
for i = 1:size(Pmap,1) % 注意在画图的时候,栅格地图中的行数i代表实际地图中的y,所以这里索引要对应修改
for j = 1:size(Pmap,2)
if Pmap(i,j) == 1
rectangle('Position',[[Xmin,Ymin]+([j,i]-1)*Wg,Wg,Wg],'FaceColor',[0 0.3 0.7]) % rectangle('Position',pos),os 指定为 [x y w h] 形式的四元素向量(以数据单位表示).x 和 y 元素确定位置,w 和 h 元素确定栅格的宽度和高度.
else
rectangle('Position',[[Xmin,Ymin]+([j,i]-1)*Wg,Wg,Wg],'FaceColor',[1 1 1]) % 绘制的时候是从0开始绘制的
end
end
end
% 注意在画图的时候,栅格地图中的行数i代表实际地图中的y,所以这里索引要对应修改
plot(P1_xy(1),P1_xy(2),'bs',...
'LineWidth',1,...
'MarkerSize',9,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.9,0.0,0.0]);
plot(start(2),start(1),'r>',...
'LineWidth',1,...
'MarkerSize',9,...
'MarkerEdgeColor','k',...
'MarkerFaceColor',[0.9,0.9,0.0]);
plot(pathPoints(:,2),pathPoints(:,1),'g','linewidth',2);
4.本算法原理
4.1 栅格地图建模

4.2 A * 算法原理
在 A * 算法中,将栅格地图中的每个可通行栅格视为一个节点。对于节点n ,定义以下关键属性:
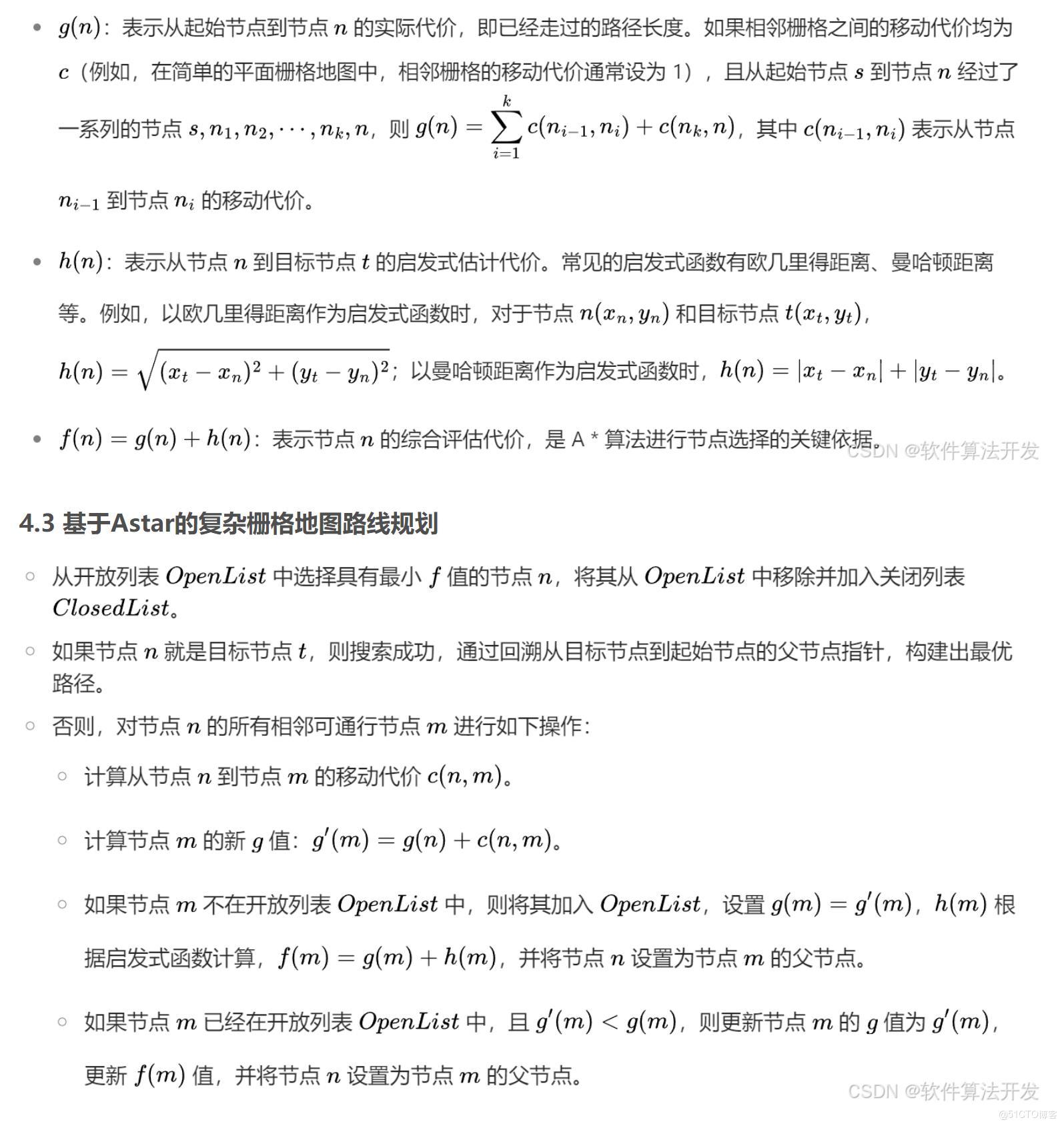
在搜索过程中,A * 算法通过不断地评估开放列表中的节点,选择具有最小 值的节点进行扩展,逐步向目标节点逼近。同时,利用关闭列表记录已经访问过的节点,避免重复搜索,提高搜索效率。基于 A算法的复杂栅格地图路线规划是一种高效、可靠的路径搜索方法。通过合理的栅格地图建模、精心设计的启发函数以及有效的搜索过程和优化策略,A算法能够在复杂环境中快速找到从起始点到目标点的近似最优路径。在实际应用中,A * 算法在机器人导航、自动驾驶、游戏开发等领域发挥着重要作用,并且随着技术的不断发展,其性能还可以通过进一步的算法改进和硬件加速等手段得到进一步提升,为解决复杂环境下的路径规划问题提供了有力的支持。
