
【笔记0106】机器学习期末复习
1 线性分类
题目:

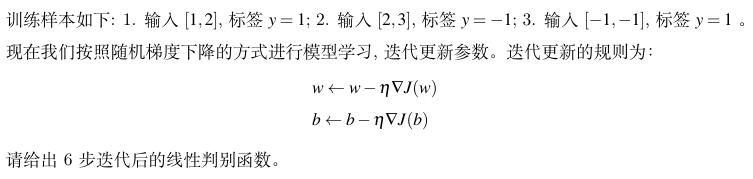
首先,我们有感知机的线性判别函数 \(f(x) = \mathbf{w}^T \mathbf{x} + b\),其中初始参数为 \(\mathbf{w} = [0, 0]\),\(b = 0\)。目标函数是 \(J(\mathbf{w}) = \sum_{\mathbf{x}_i \in E} -\mathbf{w}^T \mathbf{x}_i y_i\),其中 \(E\) 是错误分类样本集,学习率为 \(\eta = 1\)。更新规则为:
错误分类样本集 \(E\) 是指满足 \(y_i (\mathbf{w}^T \mathbf{x}_i + b) \leq 0\) 的样本集合。
给定训练样本:
- \(\mathbf{x}_1 = [1, 2]\), \(y_1 = 1\)
- \(\mathbf{x}_2 = [2, 3]\), \(y_2 = -1\)
- \(\mathbf{x}_3 = [-1, -1]\), \(y_3 = 1\)
按照随机梯度下降的方式进行模型学习,迭代更新参数。进行6步迭代,更新过程如下:
迭代过程
初始参数:
第一步:选择样本 \(\mathbf{x}_1 = [1, 2]\), \(y_1 = 1\)
-
判断是否错误分类:
\[y_1 (\mathbf{w}^T \mathbf{x}_1 + b) = 1 (0 \times 1 + 0 \times 2 + 0) = 0 \leq 0 \]错误分类。
-
更新 \(\mathbf{w}\) 和 \(b\):
\[\mathbf{w} = \mathbf{w} + y_1 \mathbf{x}_1 = [0 + 1 \times 1, 0 + 1 \times 2] = [1, 2] \]\[b = b + y_1 = 0 + 1 = 1 \]
第二步:选择样本 \(\mathbf{x}_2 = [2, 3]\), \(y_2 = -1\)
-
判断是否错误分类:
\[y_2 (\mathbf{w}^T \mathbf{x}_2 + b) = -1 (1 \times 2 + 2 \times 3 + 1) = -1 (2 + 6 + 1) = -9 \leq 0 \]错误分类。
-
更新 \(\mathbf{w}\) 和 \(b\):
\[\mathbf{w} = \mathbf{w} + y_2 \mathbf{x}_2 = [1 + (-1) \times 2, 2 + (-1) \times 3] = [-1, -1] \]\[b = b + y_2 = 1 + (-1) = 0 \]
第三步:选择样本 \(\mathbf{x}_3 = [-1, -1]\), \(y_3 = 1\)
- 判断是否错误分类:\[y_3 (\mathbf{w}^T \mathbf{x}_3 + b) = 1 ((-1) \times (-1) + (-1) \times (-1) + 0) = 1 (1 + 1 + 0) = 2 > 0 \]正确分类,不更新。
第四步:选择样本 \(\mathbf{x}_1 = [1, 2]\), \(y_1 = 1\)
-
判断是否错误分类:
\[y_1 (\mathbf{w}^T \mathbf{x}_1 + b) = 1 ((-1) \times 1 + (-1) \times 2 + 0) = 1 (-1 - 2 + 0) = -3 \leq 0 \]错误分类。
-
更新 \(\mathbf{w}\) 和 \(b\):
\[\mathbf{w} = \mathbf{w} + y_1 \mathbf{x}_1 = [-1 + 1 \times 1, -1 + 1 \times 2] = [0, 1] \]\[b = b + y_1 = 0 + 1 = 1 \]
第五步:选择样本 \(\mathbf{x}_2 = [2, 3]\), \(y_2 = -1\)
-
判断是否错误分类:
\[y_2 (\mathbf{w}^T \mathbf{x}_2 + b) = -1 (0 \times 2 + 1 \times 3 + 1) = -1 (0 + 3 + 1) = -4 \leq 0 \]错误分类。
-
更新 \(\mathbf{w}\) 和 \(b\):
\[\mathbf{w} = \mathbf{w} + y_2 \mathbf{x}_2 = [0 + (-1) \times 2, 1 + (-1) \times 3] = [-2, -2] \]\[b = b + y_2 = 1 + (-1) = 0 \]
第六步:选择样本 \(\mathbf{x}_3 = [-1, -1]\), \(y_3 = 1\)
- 判断是否错误分类:\[y_3 (\mathbf{w}^T \mathbf{x}_3 + b) = 1 ((-2) \times (-1) + (-2) \times (-1) + 0) = 1 (2 + 2 + 0) = 4 > 0 \]正确分类,不更新。
最终结果
经过6步迭代后,参数为:
线性判别函数为:
2 非线性分类
3 概率图联合分布的因子分解式
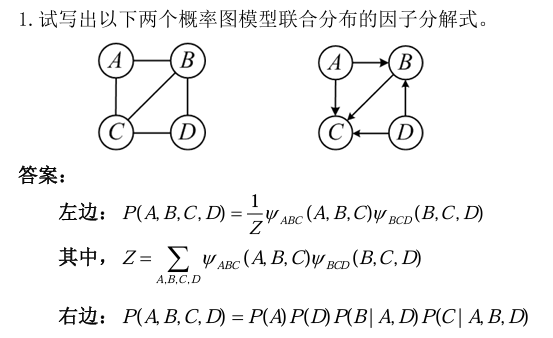
这个图中左边的是无向图,右边的是有向图。
概率图模型通过图结构表示随机变量间的条件依赖关系,联合分布的因子分解式依赖于图的类型。
1. 有向图模型(贝叶斯网络)
有向图模型使用有向无环图(DAG)表示变量间的因果关系。联合分布可分解为各变量在其父节点条件下的条件概率的乘积:
其中,\(\text{Pa}(X_i)\) 是 \(X_i\) 的父节点集合。
2. 无向图模型(马尔可夫随机场)
无向图模型使用无向图表示变量间的依赖关系。联合分布分解为图中最大团的势函数乘积,再归一化:
其中,\(\mathcal{C}\) 是最大团集合,\(\psi_c(X_c)\) 是团 \(c\) 的势函数,\(Z\) 是归一化常数。
3. 有向图与无向图的区别
- 有向图:表示因果关系,适合表达变量间的因果依赖。
- 无向图:表示关联关系,适合表达变量间的对称依赖。
选择哪种模型取决于具体问题和变量间的关系。
无向图表示的是什么?
无向图用来表示变量之间的“关联关系”。比如右图:A-B, B-C, C-D, A-C, B-D,它表示变量 A、B、C、D 之间的依赖关系。图中的每条边(比如 A-B)表示两个变量之间有直接的关联。
- A-B:A 和 B 有关系。
- B-C:B 和 C 有关系。
- C-D:C 和 D 有关系。
- A-C:A 和 C 有关系。
- B-D:B 和 D 有关系。
这个图的意思是:
- A 和 B 有关系,A 和 C 有关系,B 和 C 有关系,等等。
- 但 A 和 D 没有直接的关系(因为没有 A-D 这条边)。
最大团是啥?
“团”是指图中一些节点,它们之间两两都有边相连。而“最大团”是指一个团,它不能通过加入更多的节点而变得更大。
在你的图中:
- 最大团 1:A、B、C(因为 A-B, B-C, A-C 都有边相连)。
- 最大团 2:B、C、D(因为 B-C, C-D, B-D 都有边相连)。
最大团的意义是:这些变量之间的关系非常紧密,可以作为一个整体来考虑。
势函数是啥?
势函数是用来描述一个团中变量之间的“亲密程度”的函数。它表示这些变量在一起的可能性有多大。
比如:
- 对于最大团 A、B、C,势函数 \(\psi(A, B, C)\) 表示 A、B、C 同时取某些值的可能性。
- 对于最大团 B、C、D,势函数 \(\psi(B, C, D)\) 表示 B、C、D 同时取某些值的可能性。
势函数的值越大,说明这些变量取某些值的可能性越高。
归一化常数是啥?
归一化常数(通常记作 \(Z\))的作用是让所有可能的概率加起来等于 1。因为势函数的乘积可能不是一个概率分布(总和不一定为 1),所以需要用 \(Z\) 来调整。
公式是:
\(
P(A, B, C, D) = \frac{1}{Z} \cdot \psi(A, B, C) \cdot \psi(B, C, D)
\)
这里的 \(Z\) 就是归一化常数,它的值是所有可能的 \(\psi(A, B, C) \cdot \psi(B, C, D)\) 的总和。
结合例子解释
假设右面的图表示一个社交网络:
- A、B、C、D 是四个人。
- 边表示两个人是朋友。
最大团:
- A、B、C 是一个朋友圈。
- B、C、D 是另一个朋友圈。
势函数:
- \(\psi(A, B, C)\) 表示 A、B、C 三个人一起出现的可能性(比如他们经常一起吃饭)。
- \(\psi(B, C, D)\) 表示 B、C、D 三个人一起出现的可能性。
归一化常数:
- 假设 \(\psi(A, B, C)\) 和 \(\psi(B, C, D)\) 的值算出来很大,但为了让所有可能的概率加起来等于 1,需要用 \(Z\) 来调整。
总结
- 无向图:表示变量之间的关联关系。
- 最大团:图中关系最紧密的变量组。
- 势函数:描述一个团中变量之间的“亲密程度”。
- 归一化常数:让所有概率加起来等于 1。
通过这种方式,无向图模型可以很好地描述变量之间的复杂关系!
4 隐马尔科夫模型
1. 隐马尔可夫模型(HMM)简介
隐马尔可夫模型是一种统计模型,用于描述一个含有隐含未知参数的马尔可夫过程。它由两个随机过程组成:
- 状态序列:这是隐藏的,不可直接观测的。
- 观测序列:这是可以直接观测到的,由状态序列生成。
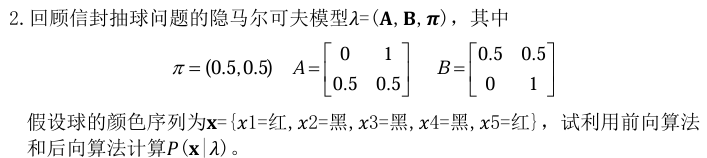
2. 信封抽球问题
假设你有两个信封,每个信封里有不同颜色的球。你随机选择一个信封,然后从中抽取一个球,记录颜色,再把球放回信封。这个过程重复多次,形成一个球的颜色序列。
3. 模型参数解释
-
𝝅(初始状态概率):表示初始时刻选择每个信封的概率。这里𝝅=(0.5,0.5)表示初始时刻选择两个信封的概率都是50%。
-
𝐀(状态转移矩阵):表示从一个状态转移到另一个状态的概率。这里A=[0,1; 0.5,0.5]表示:
- 从信封1转移到信封2的概率是1(即一定会转移到信封2)。
- 从信封2转移到信封1的概率是0.5,转移到信封2的概率也是0.5。
-
𝐁(观测概率矩阵):表示在某个状态下生成某个观测值的概率。这里B=[0.5,0.5; 0,1]表示:
- 在信封1中,抽到红球和黑球的概率都是50%。
- 在信封2中,抽到红球的概率是0,抽到黑球的概率是100%。
4. 问题解析
题目给出了一个球的颜色序列𝐱={红,黑,黑,黑,红},要求利用前向算法和后向算法计算𝑃(𝐱|𝜆),即在给定模型𝜆下,生成这个观测序列的概率。
5. 前向算法和后向算法
- 前向算法:计算从初始时刻到当前时刻,生成部分观测序列并处于某个状态的概率。
- 后向算法:计算从当前时刻到最终时刻,生成剩余观测序列并处于某个状态的概率。
通过结合前向和后向算法,可以计算出整个观测序列的概率。
计算过程
接下来我们来逐步计算 $ P(\mathbf{x} \mid \lambda) $,其中观测序列为 \(\mathbf{x} = \{红, 黑, 黑, 黑, 红\}\),模型参数为:
- 初始状态概率 \(\boldsymbol{\pi} = (0.5, 0.5)\)
- 状态转移矩阵 \(\mathbf{A} = \begin{bmatrix} 0 & 1 \\ 0.5 & 0.5 \end{bmatrix}\)
- 观测概率矩阵 \(\mathbf{B} = \begin{bmatrix} 0.5 & 0.5 \\ 0 & 1 \end{bmatrix}\)
假设状态 \(1\) 是信封1,状态 \(2\) 是信封2;观测值 \(红\) 对应索引 \(1\),\(黑\) 对应索引 \(2\)。
1. 前向算法
前向算法计算的是在时刻 \(t\) 处于状态 \(i\) 并生成观测序列 \(x_1, x_2, \dots, x_t\) 的概率,记为 \(\alpha_t(i)\)。
初始化(\(t=1\))
对于每个状态 \(i\),计算:
\(
\alpha_1(i) = \pi_i \cdot b_i(x_1)
\)
其中 \(x_1 = 红\)(索引 \(1\))。
- 对于状态 \(1\):
\( \alpha_1(1) = \pi_1 \cdot b_1(红) = 0.5 \cdot 0.5 = 0.25 \) - 对于状态 \(2\):
\( \alpha_1(2) = \pi_2 \cdot b_2(红) = 0.5 \cdot 0 = 0 \)
所以:
\(
\alpha_1 = [0.25, 0]
\)
递推(\(t=2\) 到 \(t=5\))
对于每个时刻 \(t\) 和状态 \(j\),计算:
\(
\alpha_t(j) = \sum_{i=1}^2 \alpha_{t-1}(i) \cdot a_{ij} \cdot b_j(x_t)
\)
我们逐步计算:
\(t=2\),观测 \(x_2 = 黑\)(索引 \(2\))
- 对于状态 \(1\):
\( \alpha_2(1) = \alpha_1(1) \cdot a_{11} \cdot b_1(黑) + \alpha_1(2) \cdot a_{21} \cdot b_1(黑) \)
\( \alpha_2(1) = 0.25 \cdot 0 \cdot 0.5 + 0 \cdot 0.5 \cdot 0.5 = 0 \) - 对于状态 \(2\):
\( \alpha_2(2) = \alpha_1(1) \cdot a_{12} \cdot b_2(黑) + \alpha_1(2) \cdot a_{22} \cdot b_2(黑) \)
\( \alpha_2(2) = 0.25 \cdot 1 \cdot 1 + 0 \cdot 0.5 \cdot 1 = 0.25 \)
所以:
\(
\alpha_2 = [0, 0.25]
\)
\(t=3\),观测 \(x_3 = 黑\)(索引 \(2\))
- 对于状态 \(1\):
\( \alpha_3(1) = \alpha_2(1) \cdot a_{11} \cdot b_1(黑) + \alpha_2(2) \cdot a_{21} \cdot b_1(黑) \)
\( \alpha_3(1) = 0 \cdot 0 \cdot 0.5 + 0.25 \cdot 0.5 \cdot 0.5 = 0.0625 \) - 对于状态 \(2\):
\( \alpha_3(2) = \alpha_2(1) \cdot a_{12} \cdot b_2(黑) + \alpha_2(2) \cdot a_{22} \cdot b_2(黑) \)
\( \alpha_3(2) = 0 \cdot 1 \cdot 1 + 0.25 \cdot 0.5 \cdot 1 = 0.125 \)
所以:
\(
\alpha_3 = [0.0625, 0.125]
\)
\(t=4\),观测 \(x_4 = 黑\)(索引 \(2\))
- 对于状态 \(1\):
\( \alpha_4(1) = \alpha_3(1) \cdot a_{11} \cdot b_1(黑) + \alpha_3(2) \cdot a_{21} \cdot b_1(黑) \)
\( \alpha_4(1) = 0.0625 \cdot 0 \cdot 0.5 + 0.125 \cdot 0.5 \cdot 0.5 = 0.03125 \) - 对于状态 \(2\):
\( \alpha_4(2) = \alpha_3(1) \cdot a_{12} \cdot b_2(黑) + \alpha_3(2) \cdot a_{22} \cdot b_2(黑) \)
\( \alpha_4(2) = 0.0625 \cdot 1 \cdot 1 + 0.125 \cdot 0.5 \cdot 1 = 0.125 \)
所以:
\(
\alpha_4 = [0.03125, 0.125]
\)
\(t=5\),观测 \(x_5 = 红\)(索引 \(1\))
- 对于状态 \(1\):
\( \alpha_5(1) = \alpha_4(1) \cdot a_{11} \cdot b_1(红) + \alpha_4(2) \cdot a_{21} \cdot b_1(红) \)
\( \alpha_5(1) = 0.03125 \cdot 0 \cdot 0.5 + 0.125 \cdot 0.5 \cdot 0.5 = 0.03125 \) - 对于状态 \(2\):
\( \alpha_5(2) = \alpha_4(1) \cdot a_{12} \cdot b_2(红) + \alpha_4(2) \cdot a_{22} \cdot b_2(红) \)
\( \alpha_5(2) = 0.03125 \cdot 1 \cdot 0 + 0.125 \cdot 0.5 \cdot 0 = 0 \)
所以:
\(
\alpha_5 = [0.03125, 0]
\)
最终概率
观测序列的概率为:
\(
P(\mathbf{x} \mid \lambda) = \sum_{i=1}^2 \alpha_5(i) = 0.03125 + 0 = 0.03125
\)
2. 后向算法
后向算法计算的是在时刻 \(t\) 处于状态 \(i\) 并生成观测序列 \(x_{t+1}, x_{t+2}, \dots, x_T\) 的概率,记为 \(\beta_t(i)\)。
初始化(\(t=5\))
对于每个状态 \(i\),初始化:
\(
\beta_5(i) = 1
\)
所以:
\(
\beta_5 = [1, 1]
\)
递推(\(t=4\) 到 \(t=1\))
对于每个时刻 \(t\) 和状态 \(i\),计算:
\(
\beta_t(i) = \sum_{j=1}^2 a_{ij} \cdot b_j(x_{t+1}) \cdot \beta_{t+1}(j)
\)
我们逐步计算:
\(t=4\),观测 \(x_5 = 红\)(索引 \(1\))
- 对于状态 \(1\):
\( \beta_4(1) = a_{11} \cdot b_1(红) \cdot \beta_5(1) + a_{12} \cdot b_2(红) \cdot \beta_5(2) \)
\( \beta_4(1) = 0 \cdot 0.5 \cdot 1 + 1 \cdot 0 \cdot 1 = 0 \) - 对于状态 \(2\):
\( \beta_4(2) = a_{21} \cdot b_1(红) \cdot \beta_5(1) + a_{22} \cdot b_2(红) \cdot \beta_5(2) \)
\( \beta_4(2) = 0.5 \cdot 0.5 \cdot 1 + 0.5 \cdot 0 \cdot 1 = 0.25 \)
所以:
\(
\beta_4 = [0, 0.25]
\)
\(t=3\),观测 \(x_4 = 黑\)(索引 \(2\))
- 对于状态 \(1\):
\( \beta_3(1) = a_{11} \cdot b_1(黑) \cdot \beta_4(1) + a_{12} \cdot b_2(黑) \cdot \beta_4(2) \)
\( \beta_3(1) = 0 \cdot 0.5 \cdot 0 + 1 \cdot 1 \cdot 0.25 = 0.25 \) - 对于状态 \(2\):
\( \beta_3(2) = a_{21} \cdot b_1(黑) \cdot \beta_4(1) + a_{22} \cdot b_2(黑) \cdot \beta_4(2) \)
\( \beta_3(2) = 0.5 \cdot 0.5 \cdot 0 + 0.5 \cdot 1 \cdot 0.25 = 0.125 \)
所以:
\(
\beta_3 = [0.25, 0.125]
\)
\(t=2\),观测 \(x_3 = 黑\)(索引 \(2\))
- 对于状态 \(1\):
\( \beta_2(1) = a_{11} \cdot b_1(黑) \cdot \beta_3(1) + a_{12} \cdot b_2(黑) \cdot \beta_3(2) \)
\( \beta_2(1) = 0 \cdot 0.5 \cdot 0.25 + 1 \cdot 1 \cdot 0.125 = 0.125 \) - 对于状态 \(2\):
\( \beta_2(2) = a_{21} \cdot b_1(黑) \cdot \beta_3(1) + a_{22} \cdot b_2(黑) \cdot \beta_3(2) \)
\( \beta_2(2) = 0.5 \cdot 0.5 \cdot 0.25 + 0.5 \cdot 1 \cdot 0.125 = 0.125 \)
所以:
\(
\beta_2 = [0.125, 0.125]
\)
\(t=1\),观测 \(x_2 = 黑\)(索引 \(2\))
- 对于状态 \(1\):
\( \beta_1(1) = a_{11} \cdot b_1(黑) \cdot \beta_2(1) + a_{12} \cdot b_2(黑) \cdot \beta_2(2) \)
\( \beta_1(1) = 0 \cdot 0.5 \cdot 0.125 + 1 \cdot 1 \cdot 0.125 = 0.125 \) - 对于状态 \(2\):
\( \beta_1(2) = a_{21} \cdot b_1(黑) \cdot \beta_2(1) + a_{22} \cdot b_2(黑) \cdot \beta_2(2) \)
\( \beta_1(2) = 0.5 \cdot 0.5 \cdot 0.125 + 0.5 \cdot 1 \cdot 0.125 = 0.09375 \)
所以:
\(
\beta_1 = [0.125, 0.09375]
\)
最终概率
观测序列的概率为:
\(
P(\mathbf{x} \mid \lambda) = \sum_{i=1}^2 \pi_i \cdot b_i(x_1) \cdot \beta_1(i)
\)
\(
P(\mathbf{x} \mid \lambda) = 0.5 \cdot 0.5 \cdot 0.125 + 0.5 \cdot 0 \cdot 0.09375 = 0.03125
\)
3. 结果
无论是前向算法还是后向算法,最终计算得到的观测序列概率均为:
\(
P(\mathbf{x} \mid \lambda) = 0.03125
\)
这个结果表明,在给定的隐马尔可夫模型下,生成观测序列 \(\{红, 黑, 黑, 黑, 红\}\) 的概率是 \(0.03125\)。
维特比算法
在上述隐马尔可夫模型中,试用维特比算法确定最有可能的信封序列。
维特比算法是一种动态规划算法,用于在隐马尔可夫模型中找到最可能的状态序列(即最有可能的信封序列)。
维特比算法的核心是动态规划,分为以下几步:
1.初始化:计算初始时刻每个状态的最大概率和路径。
2.递推:对于每个时刻t,计算每个状态的最大概率,并记录路径。
3.终止:找到最终时刻的最大概率和对应的状态。
4.回溯:根据记录的路径,回溯得到最可能的状态序列。
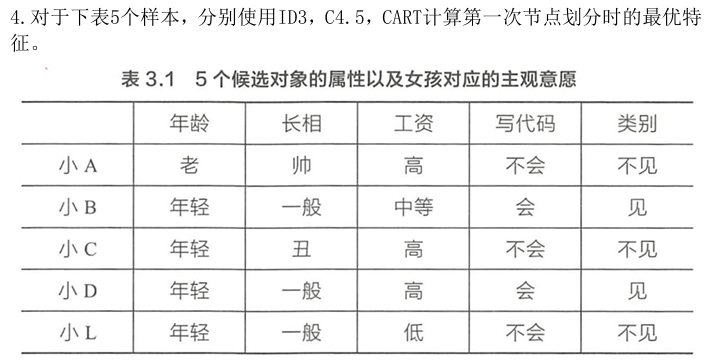
5 ID3、C4.5、CART
6 Maximum Likelihood方法
抛一枚硬币问题,观察数据情况是:一枚硬币包括正反两面,共抛了30 次,其中12 次是正面,18 次是反面。采用Maximum Likelihood 方法,估计正面出现的概率和反面出现的概率。
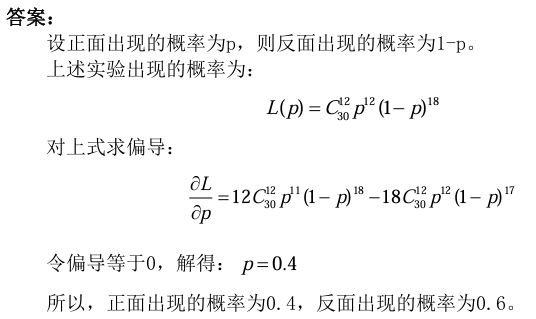
Maximum Likelihood(最大似然)方法是一种用于估计统计模型参数的常用方法。其核心思想是寻找一组参数,使得在该参数下,观测数据出现的概率(即似然)最大化。
具体步骤:
- 定义模型:假设数据服从某个概率分布(如正态分布、泊松分布等),其形式由参数决定。
- 构建似然函数:基于观测数据和模型,构建似然函数 $ L(\theta) $,表示在参数 $ \theta $ 下观测数据出现的概率。
- 最大化似然函数:通过优化方法(如求导、数值优化等)找到使 $ L(\theta) $ 最大的参数 $ \hat{\theta} $,即为最大似然估计。
举例:
假设观测数据 $ X = {x_1, x_2, \dots, x_n} $ 服从正态分布 $ N(\mu, \sigma^2) $,目标是估计均值 $ \mu $ 和方差 $ \sigma^2 $。
- 似然函数:
\( L(\mu, \sigma^2) = \prod_{i=1}^n \frac{1}{\sqrt{2\pi\sigma^2}} \exp\left(-\frac{(x_i - \mu)^2}{2\sigma^2}\right) \) - 对数似然函数(便于计算):
\( \ln L(\mu, \sigma^2) = -\frac{n}{2} \ln(2\pi) - \frac{n}{2} \ln(\sigma^2) - \frac{1}{2\sigma^2} \sum_{i=1}^n (x_i - \mu)^2 \) - 求导并最大化:
对 $ \mu $ 和 $ \sigma^2 $ 求导,令导数为零,解得:
\( \hat{\mu} = \frac{1}{n} \sum_{i=1}^n x_i, \quad \hat{\sigma}^2 = \frac{1}{n} \sum_{i=1}^n (x_i - \hat{\mu})^2 \)
优点:
- 一致性:随着数据量增加,估计值趋近于真实值。
- 渐近正态性:在大样本下,估计值服从正态分布。
- 广泛适用:可用于多种模型和分布。
缺点:
- 计算复杂:对复杂模型,优化可能困难。
- 对初值敏感:可能陷入局部最优。
总结:
Maximum Likelihood方法通过最大化观测数据的似然函数来估计模型参数,是统计学和机器学习中的重要工具。
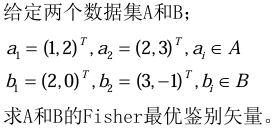
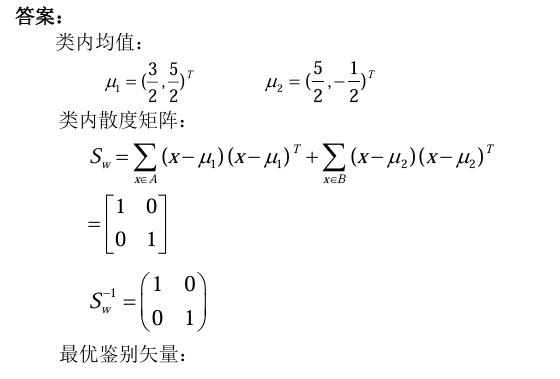
7 Fisher最优鉴别矢量

8 贝叶斯网络

 浙公网安备 33010602011771号
浙公网安备 33010602011771号