
基于51单片机的控制四线步进电机仿真设计
一、硬件设计
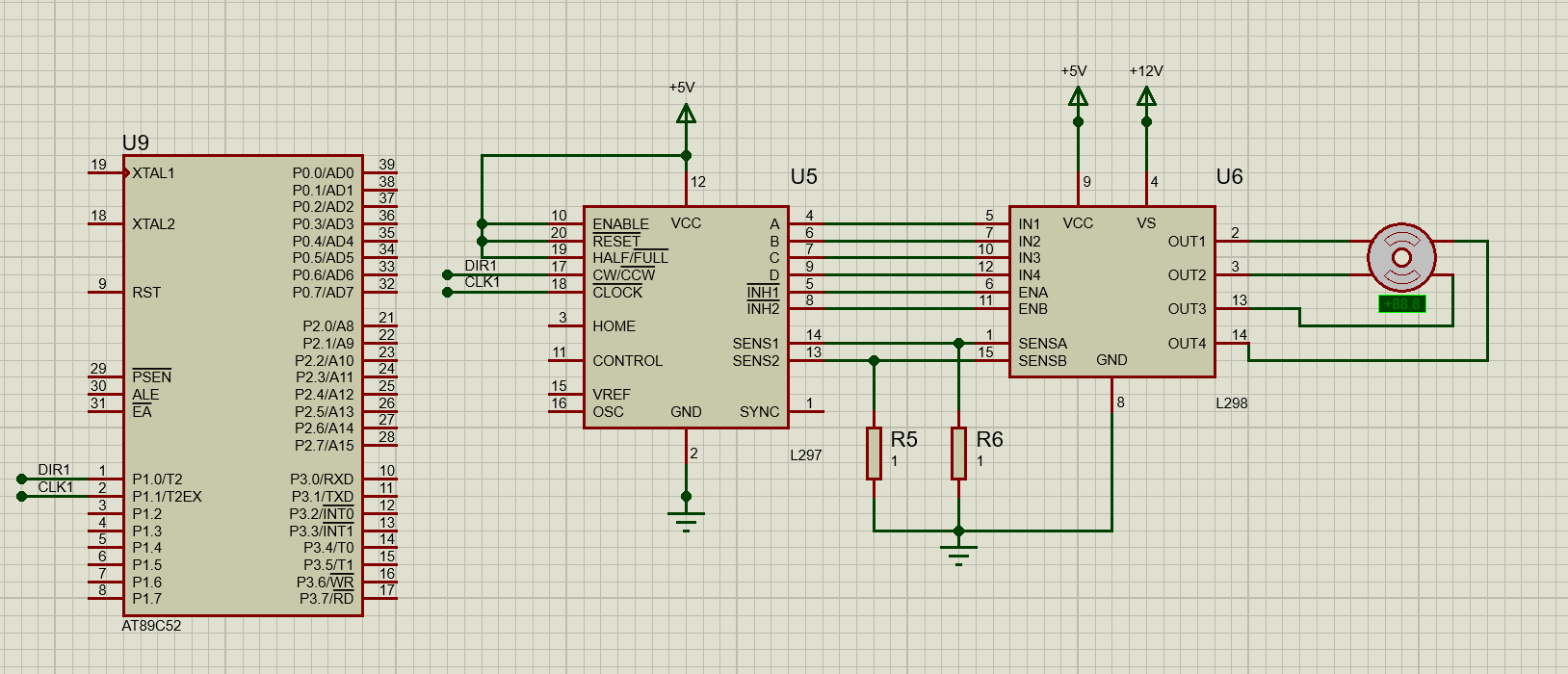
硬件使用了51单片机,L297和L298。
CW/CWW是控制电机方向,高电平正转,低电平反转。
CLOCK是时钟信号,给一个脉冲,便会有一个步进。
HALF/FULL是选择一次半步进还是全步进。假如电机步进一次90°,那么半步进就是45°。
二、软件设计
使用定时器来进行精确的定时,然后在定时器中断中改变步进电机状态。
#include <reg52.h>
#include "main.h"
sbit DIR1 = P1^0;
sbit CLK1 = P1^1;
#define CW 0
#define CCW 1
#define STOP 2
u8 motorState = 0;
void Timer0Init(void) //5毫秒@12.000MHz
{
TMOD = 0x01; //设置定时器模式
TL0 = 0x78; //设置定时初始值
TH0 = 0xEC; //设置定时初始值
TF0 = 0; //清除TF0标志
TR0 = 1; //定时器0开始计时
ET0 = 1;
EA = 1;
}
void main()
{
Timer0Init();
motorState = CCW;
while(1)
{
}
}
void Timer0() interrupt 1
{
static int counts = 0;
TL0 = 0x78; //设置定时初始值
TH0 = 0xEC; //设置定时初始值
counts++;
if(counts>10)//每隔10*5*2ms电机转动一个步距
{
if(motorState == CW)
{
DIR1 = 1;
CLK1 = !CLK1;
}else if(motorState == CCW)
{
DIR1 = 0;
CLK1 = !CLK1;
}else
{
CLK1=0;
}
counts=0;
}
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号