UZH slam 两种相机
1、event camera:http://rpg.ifi.uzh.ch/research_dvs.html

2、SCAMP Vision Sensor:https://personalpages.manchester.ac.uk/staff/p.dudek/scamp/
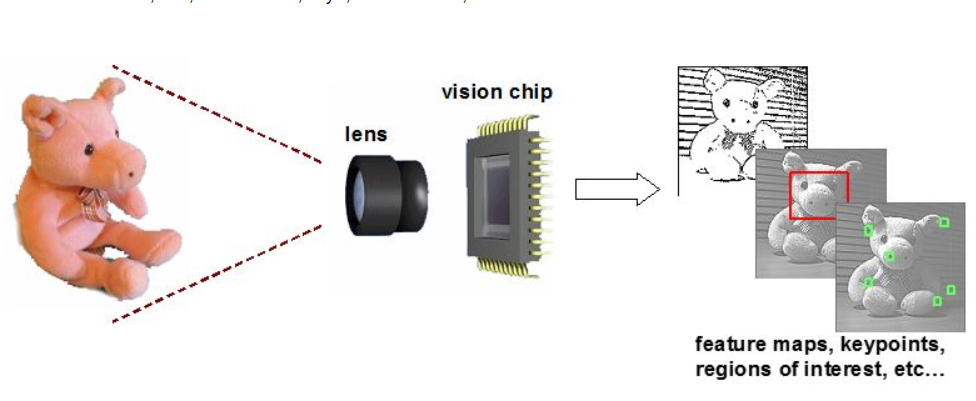
每个像素后面都集成了一个SIMD处理器。与传统传感器不同,他不输出原始图像,而是输出传感器的计算结果。例如:特征地图,光流图,或者感兴趣像素位置的事件地址描述。
能做到高速度,低功耗。

1、event camera:http://rpg.ifi.uzh.ch/research_dvs.html
2、SCAMP Vision Sensor:https://personalpages.manchester.ac.uk/staff/p.dudek/scamp/
每个像素后面都集成了一个SIMD处理器。与传统传感器不同,他不输出原始图像,而是输出传感器的计算结果。例如:特征地图,光流图,或者感兴趣像素位置的事件地址描述。
能做到高速度,低功耗。

 浙公网安备 33010602011771号
浙公网安备 33010602011771号