

详细介绍:人工智能系统学习之 FastAi 学习笔记(二)-卷积神经网络(CNN)
卷积神经网络(CNN)
| 概念 | 作用 |
|---|---|
| 特征工程 | 转换输入数据,让模型更容易提取模式。 |
| 卷积 | 自动提取图像的局部特征,如边缘、角点、纹理。 |
| 卷积核 | 一个小矩阵(如 3×3),负责扫描图像并计算特征。 |
| CNN 价值 | 免去手动设计图像特征,让模型直接从数据中学习。 |
1、核心概念“卷积”的基本思想
1️⃣ 卷积神经网络(CNN)概述
CNN 是一种专门用于图像识别的神经网络结构。
它通过卷积操作提取图像中的关键特征(例如边缘、纹理),而不需要手动设计复杂的特征工程。
fastai 提供了许多内置工具,可以轻松构建 CNN 模型,实现高精度图像分类。
2️⃣ 特征工程(Feature Engineering)
特征工程是机器学习中一个重要概念:
通过对输入数据做转换来生成更适合模型的特征。
在表格数据中,我们可能会添加日期特征(如 add_datepart)。
在图像中,特征通常是一些视觉上显著的模式,例如边缘、角点、纹理。
3️⃣ 图像中的特征
以数字识别为例:
数字 7 的特征:顶部的水平边缘 + 右上到左下的对角边。
数字 3 的特征:左上和右下的对角边 + 中间及上下的水平边缘。
CNN 的目的就是自动提取这些特征,而不需要人工标注。
4️⃣ 卷积(Convolution)的原理
卷积是提取图像特征的核心操作。
卷积的核心是一个卷积核(kernel),例如 3x3 的小矩阵。
核心运算步骤:
卷积核在图像上滑动(扫描)。
对覆盖的区域执行元素相乘并求和。
输出的结果是新的“特征图”(feature map)。
卷积能够自动检测图像中的边缘、线条等局部特征,是 CNN 强大表现的根基。
2、数学计算原理
卷积与卷积核 (Kernel)
卷积 (Convolution):一种用小矩阵(卷积核或滤波器)在图像上滑动并进行运算的操作。
卷积核 (Kernel):例如一个 3×3 的权重矩阵,会与图像的每一个 3×3 区域对应元素相乘,再把结果相加,得到一个新的数值,构成输出特征图。
边缘检测的例子:Top Edge Filter
示例卷积核:
top_edge = tensor([[-1,-1,-1],
[ 0, 0, 0],
[ 1, 1, 1]]).float()上方的 -1 表示“减去上边像素”
下方的 1 表示“加上下边像素”
中间 0 表示忽略中间行
作用:检测水平边缘。
当图像某处上方亮度低、下方亮度高时(由亮到暗的过渡),卷积结果是一个大正数。
如果上下亮度相近,结果接近 0。
例子:
(im3_t[4:7,6:9] * top_edge).sum() # 计算位置(5,8)
# 结果 tensor(762.)说明这里是一个显著的上边缘(数值越大表示越符合边缘特性)。
更复杂的应用
改变 kernel 的形状可以检测不同特征,比如:
左边缘(竖直边缘)
斜线
模糊、锐化等
在深度学习的卷积神经网络(CNN)中,这些 kernel 会在训练中自动学习,而不是手工设定。
代码要点与流程
卷积kernel
取样图像并转为张量
im3 = Image.open(path/'train'/'3'/'12.png')
im3_t = tensor(im3)卷积计算
(im3_t[4:7,6:9] * top_edge).sum()选取局部区域并做逐元素乘积求和。
封装函数便于复用
def apply_kernel(row, col, kernel):
return (im3_t[row-1:row+2, col-1:col+2] * kernel).sum()例如 apply_kernel(5,7,top_edge)。
卷积操作(取特征)
假设输入数据 xb:
一批 64 张图片
每张图片是单通道(灰度图)
每张图片大小 28×28
所以形状是 [64, 1, 28, 28]
卷积核 edge_kernels:
一共 4 个卷积核(检测不同方向的边)
每个卷积核的大小 3×3
单通道输入
所以形状是 [4, 1, 3, 3]
batch_features = F.conv2d(xb, edge_kernels)PyTorch 一次把这 4 个卷积核应用到 64 张图片的每一张上。
输出形状是 [64, 4, 26, 26]
输出的 4 个维度含义:
64:保留输入的批大小(每张图片都会得到对应输出)
4:因为有 4 个卷积核,每个卷积核产生一个特征图
26×26:卷积后的空间尺寸
为什么从 28×28 变成了 26×26?是因为卷积大小是 3×3,没有 padding,步长是 1。
out_height = (28 + 20 - 3)/1 + 1 = 26
out_width = (28 + 20 - 3)/1 + 1 = 26
PyTorch 的强大之处:
一次操作多个图片:批处理(batch),这里是 64 张。
一次操作多个卷积核:4 个卷积核。
一次操作多通道:例如彩色图可以有 RGB 三个通道。
同时利用 GPU 并行运算:如果不并行,而是一张图一个卷积核地做,需要几百倍乃至上千倍的时间。
界像素的“丢失”和 padding:
因为没有填充(padding),卷积核在最外一圈无法完整覆盖,导致每个方向上都少了 2 个像素(上少 1 行,下少 1 行;左少 1 列,右少 1 列),所以从 28×28 缩小到 26×26。
解决办法:
设置 padding=1,即在图像四周补上一圈 0:
F.conv2d(xb, edge_kernels, padding=1)这样输出大小就能保持和输入一致(28×28)。
为什么需要Padding(填充)?
当 kernel(卷积核)在输入图像上滑动时,靠近图像边缘的像素被“利用得不够充分”,因为卷积核无法超出图像边界。
例如:一个 5×5 图像,用 3×3 kernel 卷积后,输出是 3×3,比原图小。
这样每次卷积都会让图像缩小,如果层数多,图像很快就会变成非常小的矩阵。
解决办法:Padding
在图像四周补充额外的像素(一般补 0),这样可以保证卷积核能覆盖到边缘像素。
效果:
如果我们希望输出大小和输入保持一致(最常见),那么需要在四周补 ks//2 个像素(ks 是 kernel 大小)。
比如 3×3 kernel → padding = 1
输入 5×5 → 输出 5×5(保持大小不变)。
Stride(步幅)
默认 stride = 1:卷积核每次移动 1 个像素。
stride > 1:卷积核每次跨更大的步长,跳跃式地采样。
例如 stride = 2,相当于“下采样”,输出的尺寸会更小。
常用于降低空间维度,减少计算量。
输出大小公式
对于输入大小 n(可以是高度 h 或宽度 w),卷积输出大小的计算公式是: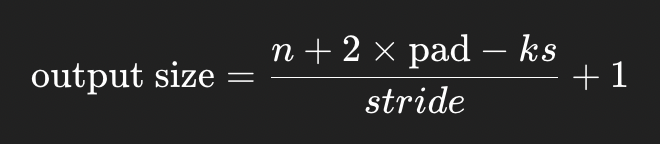
其中:
n = 输入大小(h 或 w)
pad = padding 的大小
ks = kernel 的大小
stride = 步幅
卷积等式的理解:
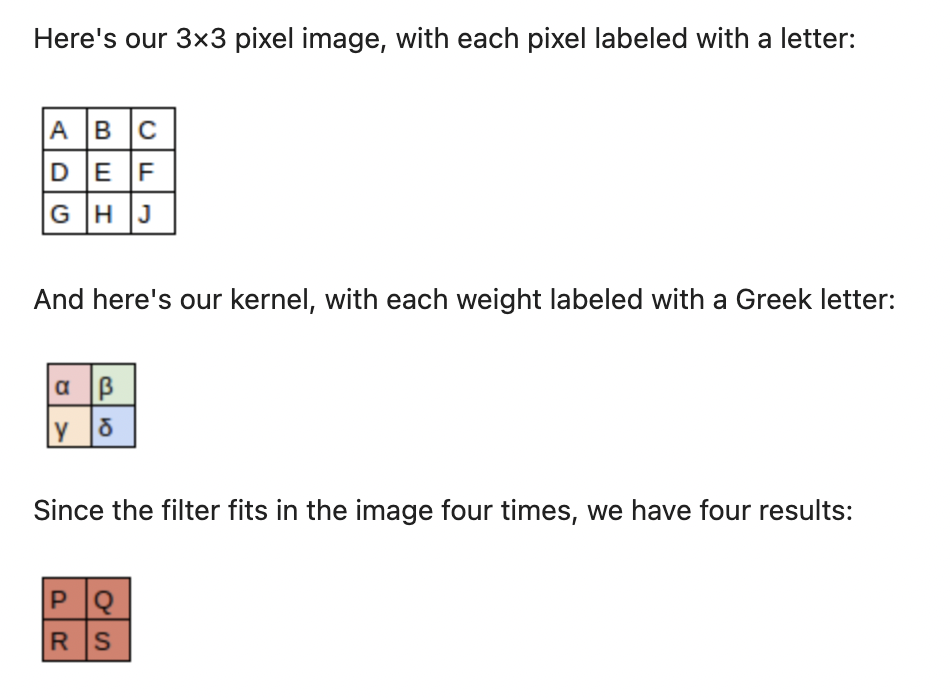
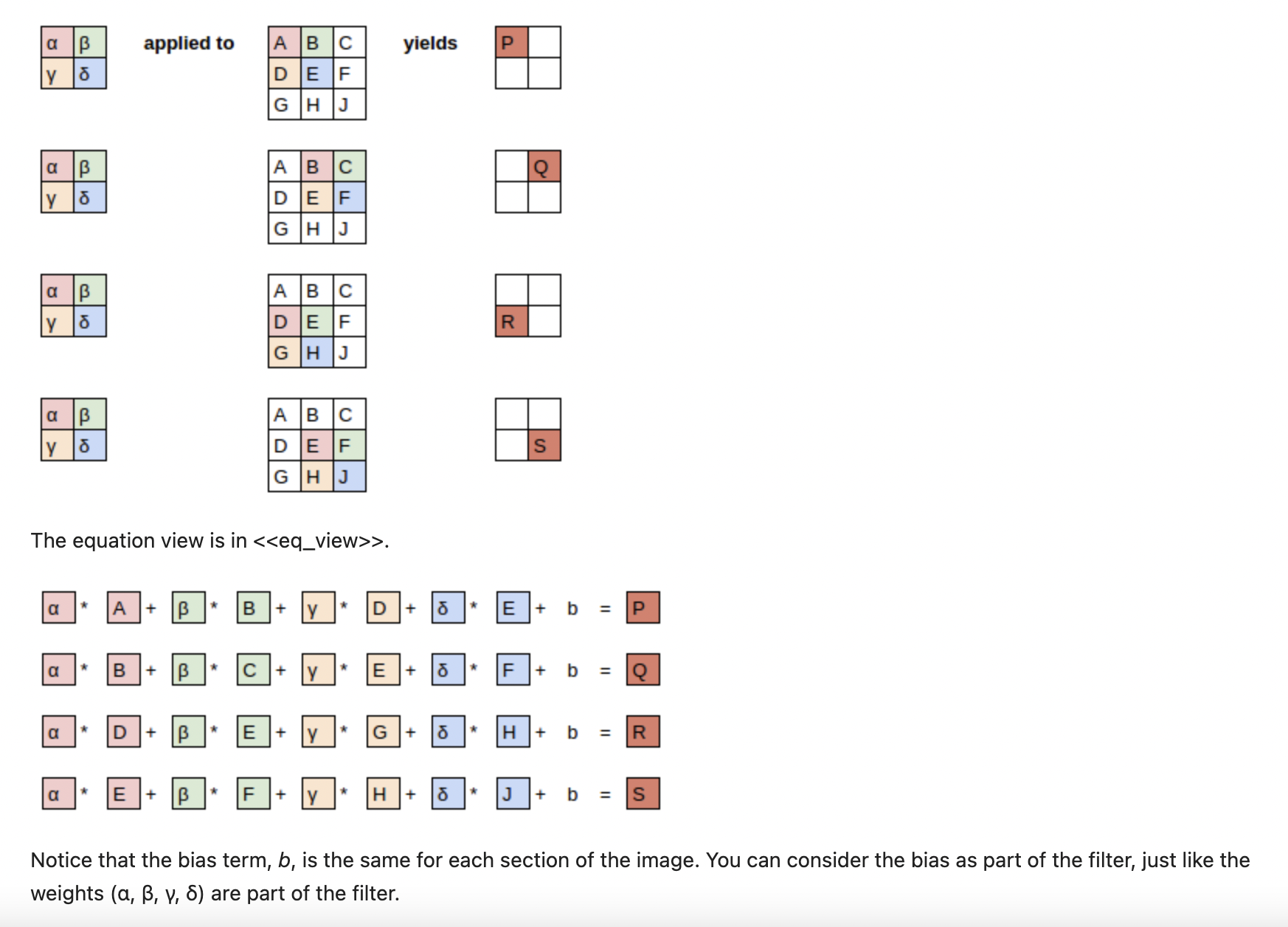
把卷积写成矩阵乘法的形式:
输入图像的像素排成一个向量:
卷积核被“展开”成一个稀疏矩阵(很多位置是 0),然后乘以上面的输入向量,再加上偏置 b
这样,就可以把卷积看成是一种特殊的矩阵乘法。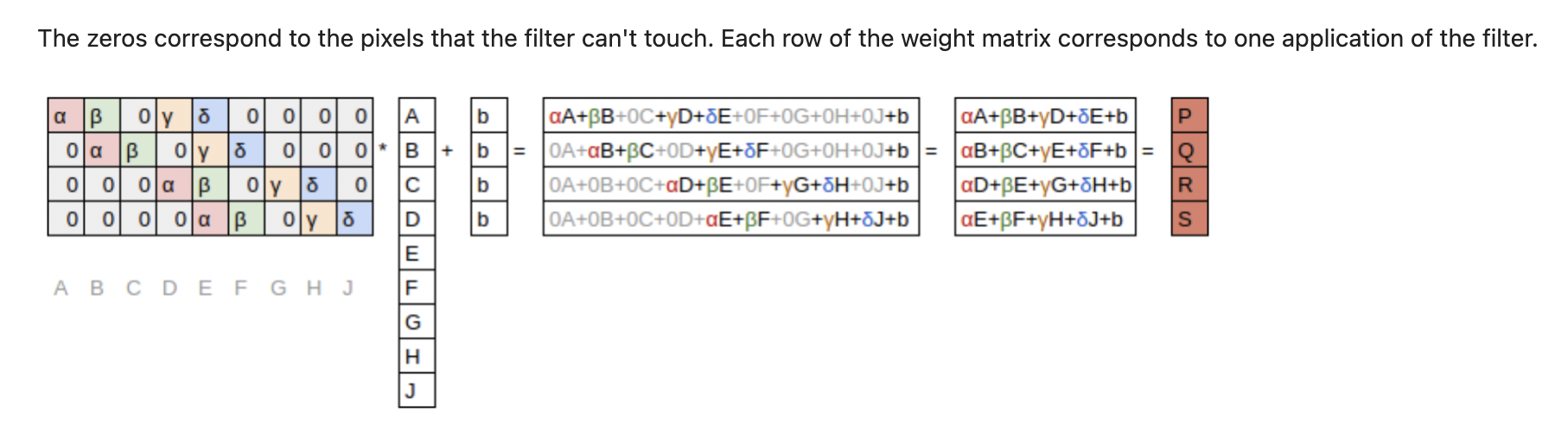
特殊性质:
- 共享权重(Shared Weights)
不同位置的卷积操作,卷积核参数α,β,γ,δ 都是一样的。
这和全连接层(每个位置都有独立权重)不同,大大减少了参数数量。 - 稀疏连接(Sparse Connections)
每次卷积只覆盖输入的一小部分(局部感受野),不像全连接层那样和所有输入相连。
3、第一个CNN卷积神经网络
回顾:nn.Linear 是什么
nn.Linear 是 PyTorch 里的 全连接层(Fully Connected Layer, FC),也叫 线性层。它的功能就是做一个线性变换: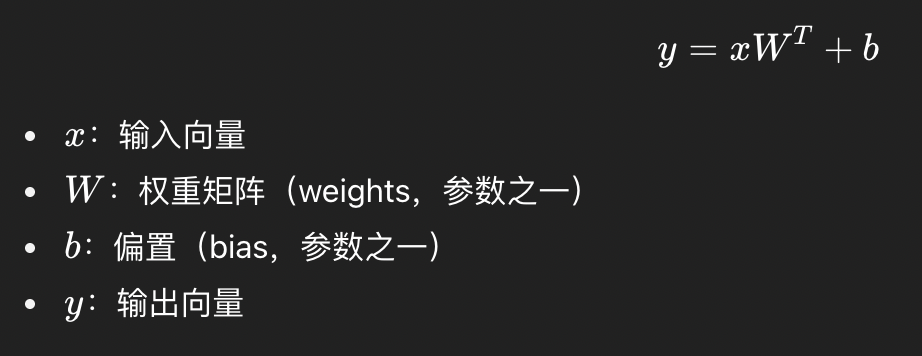
nn.Linear(in_features, out_features, bias=True)in_features:输入向量的维度(多少个输入神经元)
out_features:输出向量的维度(多少个输出神经元)
bias:是否加上偏置项(默认为 True)
例如:
import torch
import torch.nn as nn
# 定义一个 Linear 层:输入是 4 维,输出是 2 维
fc = nn.Linear(4, 2)
# 输入一个 batch,batch_size=3,每个样本是 4 维
x = torch.randn(3, 4)
# 前向传播
y = fc(x)
print(y.shape) # torch.Size([3, 2])这表示:
输入每个样本是 4 维
经过 Linear(4,2) 变成 2 维
对 batch 中 3 个样本一起处理,输出形状就是 [3,2]
总结:
nn.Linear 就是一个 矩阵乘法 + 加偏置 的操作。
它把输入向量从一个维度映射到另一个维度,相当于神经元之间的全连接。
nn.Conv2d
输入:(batch=64, channels=1, height=28, width=28)
卷积层:nn.Conv2d(1, 30, kernel_size=3, padding=1)
输出:(64, 30, 28, 28)
这里的 30 来自 out_channels,不是图像大小。
图像大小还是28*28
nn.Conv2d(in_channels, out_channels, kernel_size, padding, stride)in_channels:输入图像的通道数
灰度图像是 1 通道
彩色 RGB 图像是 3 通道
out_channels:卷积层要学习的 卷积核数量(feature maps 的数量)
这里的 30 就表示会学习 30 个 3×3 的卷积核
每个卷积核都会扫描整张输入图像,提取不同的特征(比如边缘、纹理、曲线等)
输出时就会得到 30 张 feature map,因此输出通道数是 30
kernel_size=3:卷积核大小是 3×3
padding=1:在图像四周补 1 像素(保持输出大小不变)
stride=1(默认):卷积核每次移动 1 像素
broken_cnn
broken_cnn = sequential(
nn.Conv2d(1, 30, kernel_size=3, padding=1),
nn.ReLU(),
nn.Conv2d(30, 1, kernel_size=3, padding=1)
)输入:28×28 灰度图(channel=1)
第 1 个 Conv2d:输入通道=1(图像通道数),输出通道=30,kernel=3×3,padding=1,这里30可以理解为30个特征kernel
ReLU:不改变形状
第 2 个 Conv2d:输入通道=30,输出通道=1,kernel=3×3,padding=1
一个简单CNN
先定义一个转换函数conv:
def conv(ni, nf, ks=3, act=True):
res = nn.Conv2d(ni, nf, stride=2, kernel_size=ks, padding=ks//2)
if act:
res = nn.Sequential(res, nn.ReLU())
return res创建了一个 卷积层,输入通道 ni,输出通道 nf
卷积核大小 ks(默认为 3)
步长 stride=2 → 输出尺寸减半
padding=ks//2 → 保持特征图大小相对稳定(对称填充)
创建一个简单CNN:
simple_cnn = sequential(
conv(1 ,4), #14x14
conv(4 ,8), #7x7
conv(8 ,16), #4x4
conv(16,32), #2x2
conv(32,2, act=False), #1x1
Flatten(),
)每层的含义
1️⃣ conv(1, 4) → 输出 14×14
输入:1 通道(灰度图 28×28)
卷积核数量:4 → 输出 4 个特征图
stride=2 → 尺寸减半:28×28 → 14×14
结果:输出形状 = (batch, 4, 14, 14)
2️⃣ conv(4, 8) → 输出 7×7
输入:4 通道
输出:8 通道(8 个特征图)
尺寸:14×14 → 7×7
结果:输出形状 = (batch, 8, 7, 7)
3️⃣ conv(8, 16) → 输出 4×4
输入:8 通道
输出:16 通道
尺寸:7×7 → 4×4
结果:(batch, 16, 4, 4)
4️⃣ conv(16, 32) → 输出 2×2
输入:16 通道
输出:32 通道
尺寸:4×4 → 2×2
结果:(batch, 32, 2, 2)
5️⃣ conv(32, 2, act=False) → 输出 1×1
输入:32 通道
输出:2 通道
尺寸:2×2 → 1×1
注意:这里 act=False → 不加 ReLU,最后一层直接保留卷积结果
结果:(batch, 2, 1, 1)
6️⃣ Flatten()
把 (batch, 2, 1, 1) 展平为 (batch, 2)
相当于得到了一个 2 维的输出向量(可以对应二分类任务的两个类别分数)
总体结构
输入:(batch, 1, 28, 28)
输出:(batch, 2)
这其实就是一个完整的 CNN 分类网络:
多层卷积 + ReLU:逐层提取特征,通道数增加,空间尺寸缩小
最后卷积到 1×1:相当于全局特征提取
Flatten:变成一个小向量(这里是 2 维)作为最终输出
simple_cnn(xb).shape
torch.Size([64, 2])
learn = Learner(dls, simple_cnn, loss_func=F.cross_entropy, metrics=accuracy)
learn.summary()
Sequential (Input shape: ['64 x 1 x 28 x 28'])
================================================================
Layer (type) Output Shape Param # Trainable
================================================================
Conv2d 64 x 4 x 14 x 14 40 True
________________________________________________________________
ReLU 64 x 4 x 14 x 14 0 False
________________________________________________________________
Conv2d 64 x 8 x 7 x 7 296 True
________________________________________________________________
ReLU 64 x 8 x 7 x 7 0 False
________________________________________________________________
Conv2d 64 x 16 x 4 x 4 1,168 True
________________________________________________________________
ReLU 64 x 16 x 4 x 4 0 False
________________________________________________________________
Conv2d 64 x 32 x 2 x 2 4,640 True
________________________________________________________________
ReLU 64 x 32 x 2 x 2 0 False
________________________________________________________________
Conv2d 64 x 2 x 1 x 1 578 True
________________________________________________________________
Flatten 64 x 2 0 False
________________________________________________________________
Total params: 6,722
Total trainable params: 6,722
Total non-trainable params: 0
Optimizer used: <function Adam at 0x7fbc9c258cb0>
Loss function: <function cross_entropy at 0x7fbca9ba0170>
Callbacks:
- TrainEvalCallback
- Recorder
- ProgressCallbacklearn.fit_one_cycle(2, 0.01)
epoch train_loss valid_loss accuracy time
0 0.072684 0.045110 0.990186 00:05
1 0.022580 0.030775 0.990186 00:054、神经网络优化及观察
感受视野(Receptive Field)
- 感受野(Receptive Field)的直观比喻
你可以把 CNN 想成一个“观察者”:
第一层卷积:眼睛只能看到一小块(比如 3×3)的区域。
第二层卷积:虽然它还是“看 3×3”,但它看的对象是上一层的特征。而上一层的一个点,其实已经代表了原始图像的 3×3,所以第二层“间接”看到的是更大范围(比如 7×7)。
第三层卷积:再叠一层,能看到的范围就更大了(比如 15×15)。
这样一层层堆下去,越往后的神经元,能看到输入图像的范围就越大,直到最后几乎覆盖整张图。 - 数学规律
如果每一层卷积核大小是 ,步幅 stride 是
第一层感受野:
第二层感受野:上一层感受野 × stride + (kernel_size - 1)
第三层感受野:再套一次这个公式
…
例子:
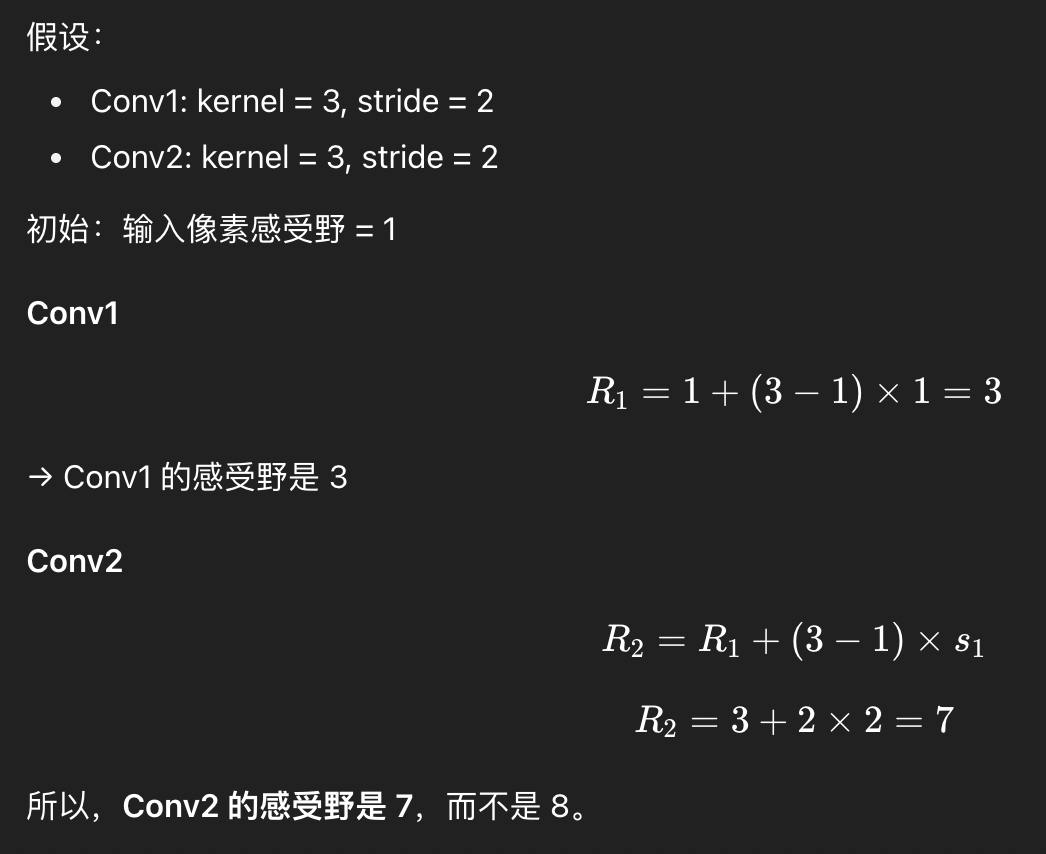
输入图像 28×28,每层卷积核 3×3,stride=2。
Conv1 → 感受野 = 3
Conv2 → 感受野 = 3×2 + (3-1) = 8(严格推算是 7,但大概就是比 3 大很多)
Conv3 → 再扩大,能看到 15×15
Conv4 → 扩大到 31×31,几乎整张图了
第 层的感受野严格公式:
Π这个符号是 连乘积符号(Π,Pi notation),和求和的 Σ 很像,但它表示的是乘法而不是加法。
- 为什么重要?
浅层卷积 → 只能提取小的局部特征(边缘、角点)
深层卷积 → 感受野更大,能理解更复杂的模式(比如一条腿、一张脸)
最后几层 → 感受野足够大,能看到整张图,做整体分类(比如“这是个数字 7”)。
画图查看数据
把图像的三个通道、三个子图位置、三个颜色映射规则一一配对,然后在循环里一次性画出来。
im = image2tensor(Image.open(image_bear()))
im.shape
torch.Size([3, 1000, 846])
show_image(im); #显示一张图
_,axs = subplots(1,3) #1行3列的画图
for bear,ax,color in zip(im,axs,('Reds','Greens','Blues')):
show_image(255-bear, ax=ax, cmap=color) #显示3张图zip用法:
zip(a, b, c) 会把多个序列「打包」在一起。
它会同时从 a、b、c 中各取一个元素,组成一个元组 (a[i], b[i], c[i])。
最终循环时,就会一次次得到这些三元组。
举个小例子:
for x, y, z in zip([10,20,30], [‘A’,‘B’,‘C’], [‘R’,‘G’,‘B’]):
print(x, y, z)
输出:
10 A R
20 B G
30 C B
show_image基本用法
show_image(image, ax=None, **kwargs)
参数解释
image: 输入的图像数据。通常是一个 Tensor(例如,形状为 (C, H, W),表示通道、宽度和高度)或 PIL 图像。可以是单通道(灰度图像)或者多通道(RGB图像)。
ax: 可选参数。指定绘图的子图(matplotlib 的 Axes 对象),如果没有提供,默认会创建新的图像。
kwargs: 其他额外的参数,可能用于控制图像显示的行为,例如颜色映射(cmap)、标题(title)等。
常见激活函数
| 激活函数 | 数学表达式 | 图形特征 | 主要作用 |
|---|---|---|---|
| ReLU | ( f(x) = \max(0, x) ) | 小于0变0,大于0保持原样 | 计算快、梯度不消失,是最常用的 |
| Sigmoid | ( f(x) = \frac{1}{1 + e^{-x}} ) | 输出范围(0,1) | 常用于二分类输出层 |
| Tanh | ( f(x) = \tanh(x) ) | 输出范围(-1,1) | 常用于隐藏层(已被ReLU取代) |
| Softmax | ( f_i(x) = \frac{e^{x_i}}{\sum_j e^{x_j}} ) | 转成概率分布 | 用于多分类的最后一层 |
“激活值”的作用
“激活值”就是每个神经元在经过激活函数后的输出结果
在训练时,模型会不断更新权重 ,
而每一层的输出(激活值)就会告诉我们网络“活不活着”。
如果激活值:
太大 → 梯度爆炸(数值发散)
太小 → 梯度消失(模型学不动)
全是 0 → 网络死掉(尤其 ReLU)
所以我们要监控:
激活的平均值(mean)
标准差(std)
有多少接近 0(% near zero)
| 指标 | 含义 | 说明 |
|---|---|---|
| mean | 激活平均值 | 应该在 0 附近 |
| std | 激活标准差 | 不应太大或太小 |
| % near zero | 接近 0 的比例 | 太高说明神经元“死掉” |
1cycle Training
1cycle 是一种 学习率调度策略,由 Leslie Smith 提出。
它的思想是:不固定学习率,而是在训练过程中先上升再下降。FastAI 提供了便捷函数:
learn.fit_one_cycle(epochs, lr_max)| 阶段 | 原因 |
|---|---|
| 低学习率开始 | 防止初期发散(权重太乱) |
| 中高学习率阶段 | 训练更快、能跳出坏的局部极小值 |
| 再降低学习率 | 让模型稳定下来,防止震荡、提高泛化性 |
训练效果可视化
learn.activation_stats.color_dim(-2)展示整个训练过程中激活分布随 batch 的变化情况。
横轴:训练 batch
纵轴:激活值范围
颜色:激活值出现的密度(亮 = 多)
解释图像:
左侧暗蓝 → 激活接近 0(模型刚开始,几乎没激活)
黄色上升 → 激活开始分布到更广范围(模型开始学习)
如果黄色部分反复出现和坍塌(collapse) → 表示训练不稳定,激活周期性爆炸又塌陷。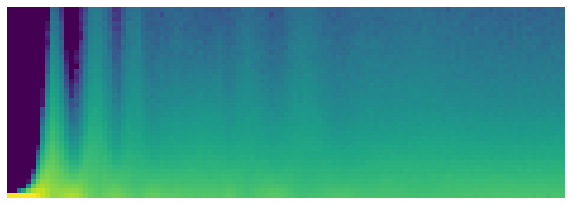
为什么会 collapse?
激活值反复爆炸又归零,常见原因有:
学习率过高(1cycle 未调好)
没有批标准化(BatchNorm)
权重初始化不平衡
ReLU 截断过多
解决方案:
使用 Batch Normalization
使用 1cycle 调度 让激活分布平滑变化
检查 learning rate finder 选择合适的 lr_max
Batch Normalization
Batch Normalization 解决的问题:内部协变量偏移(Internal Covariate Shift)
问题背景:
在训练神经网络时,每一层的输入分布会不断变化:
因为前一层的参数在训练中不断更新。
这样会导致:
后面层的输入分布不停变化;
网络不得不“重新适应”这些变化;
训练变慢、甚至不稳定;
必须使用更小的学习率和精心初始化。
这种现象就叫:
内部协变量偏移(Internal Covariate Shift)
BatchNorm 让每一层的输入“先归一化再微调”。
它既保证训练稳定(通过归一化),又保持模型灵活(通过 γ 和 β)。
BN 的三步核心操作:
第 1 步:计算当前 batch 的均值和标准差
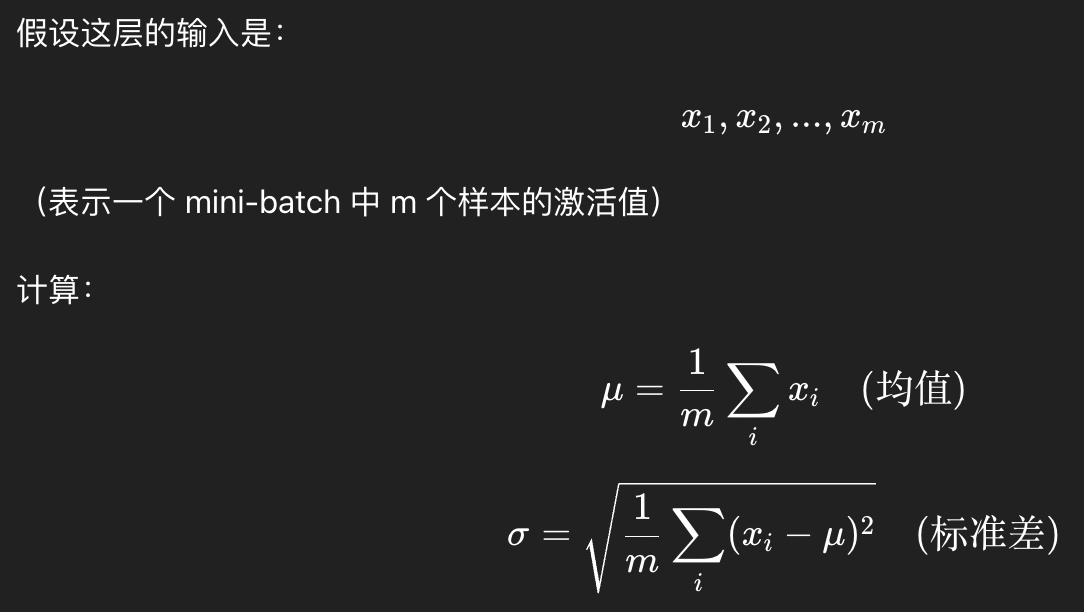
这就相当于“看这一批数据整体的分布中心和离散程度”。
第 2 步:标准化每个激活
用刚算出来的均值 μ 和标准差 σ,把每个激活值拉到同一标准上: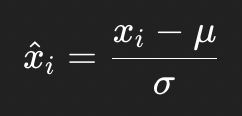
意思是:
减去均值(中心化),让整体平均值变成 0;
除以标准差(缩放),让整体方差变成 1。
结果:
这一层的输出分布被“归一化”成标准正态分布(平均为 0,方差为 1)。
第 3 步:加入两个可学习参数 γ(gamma)和 β(beta)
归一化之后,虽然分布变稳定了,但所有层的输出都变成了标准正态分布(太“死板”)。
模型可能需要“更灵活的”输出范围,比如某些层希望输出更大或更偏移。
所以:
我们给 BN 加两个参数,让模型自己去学: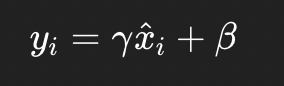
γ(gamma)控制“缩放”程度(相当于调整方差);
β(beta)控制“平移”程度(相当于调整均值)。
它们都是可学习的参数,会随着训练自动更新。
5、全卷积网络(Fully Convolutional Network, FCN)
问题的提出
如果在128*128的 Imagenette 上使用cnn,会有两个问题
需要太多 stride=2 的卷积层 才能把 128×128 的特征图变成 1×1,这样模型会变得又深又慢。
只能处理固定大小的输入,如果训练时是 128×128,将来换成 224×224 就不行了。
代码:
def avg_pool(x): return x.mean((2,3))
它对最后两维(x, y 方向)求平均,从而把 bs x ch x h x w 变成 bs x ch。
PyTorch 里提供了一个更灵活的模块:
nn.AdaptiveAvgPool2d(1)
它可以自动把任何尺寸的特征图变成 1×1。
全卷积网络的结构
这样的网络一般是:
一系列卷积层(有些 stride=2)
最后接一个 Adaptive Average Pooling
再接一个 Flatten
最后接一个 Linear 层 输出分类结果。
代码示例:
def block(ni, nf): return ConvLayer(ni, nf, stride=2)
def get_model():
return nn.Sequential(
block(3, 16),
block(16, 32),
block(32, 64),
block(64, 128),
block(128, 256),
nn.AdaptiveAvgPool2d(1),
Flatten(),
nn.Linear(256, dls.c)
)6、ResNet(残差网络)
背景:深层网络训练困难
在 ResNet 出现之前,研究者发现一个奇怪的现象:
网络层数越多,性能反而变差。
不是因为过拟合(overfitting),而是因为**训练误差(training error)**本身变高。
也就是说,SGD(随机梯度下降)根本训练不好更深的网络。
按理说,如果我们在一个 20 层网络上训练好了参数,再把它“扩展”成 56 层(后面加一些不做任何操作的层),那 56 层网络理论上至少不会比 20 层差。
但在实践中却发现 —— 优化算法找不到这么好的解。
核心思想:跳跃连接(Skip Connection)
ResNet 的核心在于一种结构叫 跳跃连接(skip connection)或 残差连接(residual connection)。
用公式表示就是: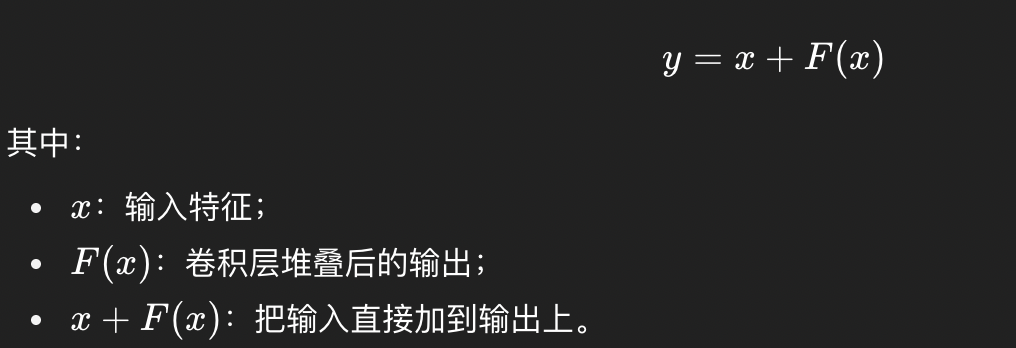
也就是说,这个模块不直接学习“目标输出 ,而是学习“目标输出和输入的差值(残差)”。这就是 “Residual Network” 的由来。
为什么这样做能改善训练?因为在训练时,如果最优的映射其实是“恒等映射”(即输出等于输入),那么只要 F(x)=0 就能实现。
相比让网络直接学“恒等映射”,让它学“偏离恒等的差值”要容易得多。
ResBlock 的实现
class ResBlock(Module):
def __init__(self, ni, nf, stride=1):
self.convs = _conv_block(ni,nf,stride)
self.idconv = noop if ni==nf else ConvLayer(ni, nf, 1, act_cls=None)
self.pool = noop if stride==1 else nn.AvgPool2d(2, ceil_mode=True)
def forward(self, x):
return F.relu(self.convs(x) + self.idconv(self.pool(x)))这里:
noop 表示“不做任何操作”(no operation);
idconv 只在通道数不同时起作用;
pool 只在 stride≠1 时起作用;
ReLU 激活放在最后(整个 block 当成一个逻辑层)。
它做的事情就是:输入 x,经过两层卷积,再加回原始 x。
用 AvgPool2d(stride=2) 来让 x 的空间尺寸对齐;
用 1×1 卷积 改变通道数,使 x 能和输出相加。
ResNet 的改进:加入 “Stem” 层
ResNet 的前几层占据了大部分计算量,
因为图像在最开始分辨率很高(如 128×128),
每个卷积操作都需要处理非常多像素。
因此,ResNet 的第一部分(称为 Stem)
采用几层普通的卷积(ConvLayer)+ 最大池化(MaxPool):
def _resnet_stem(*sizes):
return [
ConvLayer(sizes[i], sizes[i+1], 3, stride=2 if i==0 else 1)
for i in range(len(sizes)-1)
] + [nn.MaxPool2d(kernel_size=3, stride=2, padding=1)] Stem 的作用:
先用几层简单的卷积快速“压缩”图像;
减少后续复杂 ResNet Block 的计算压力;
前面计算多、参数少;后面计算少、参数多。
例如:
第一层卷积:3 输入通道 → 32 输出通道,参数约 864;
最后一层卷积:256 输入通道 → 512 输出通道,参数超过 117 万。
所以前几层是 计算密集型(compute-heavy),
而后几层是 参数密集型(parameter-heavy)。
完整的现代 ResNet 架构
在 fastai 的实现中,ResNet 包含四组残差块:
第 1 组:64 通道
第 2 组:128 通道
第 3 组:256 通道
第 4 组:512 通道
除了第一组外,每组的第一个 block stride=2 用来下采样。
class ResNet(nn.Sequential):
def __init__(self, n_out, layers, expansion=1):
stem = _resnet_stem(3,32,32,64)
self.block_szs = [64,64,128,256,512]
for i in range(1,5): self.block_szs[i] *= expansion
blocks = [self._make_layer(*o) for o in enumerate(layers)]
super().__init__(*stem, *blocks,
nn.AdaptiveAvgPool2d(1), Flatten(),
nn.Linear(self.block_szs[-1], n_out))_make_layer 的功能:
根据 layers=[2,2,2,2] 等参数,
生成对应数量的 ResBlock,每组之间控制 stride。
rn = ResNet(dls.c, [2,2,2,2]) # 相当于 ResNet-18
让网络更深:Bottleneck 层
为了在不增加太多计算量的情况下加深网络,
ResNet-50 及更深版本(如 ResNet-101、152)引入了 瓶颈层(bottleneck layer)。
它不再堆叠两个 3×3 卷积,而是:
1×1 → 3×3 → 1×1
结构示意:
输入通道 → 降维(1×1) → 卷积(3×3) → 升维(1×1)
为什么这样更高效?
1×1 卷积非常快;
中间层用较少通道数进行 3×3 卷积;
最后再恢复通道数(expand back)。
→ 参数更少,速度更快,还能增加特征数(通常 ×4)。
代码:
def _conv_block(ni,nf,stride):
return nn.Sequential(
ConvLayer(ni, nf//4, 1),
ConvLayer(nf//4, nf//4, stride=stride),
ConvLayer(nf//4, nf, 1, act_cls=None, norm_type=NormType.BatchZero))ResNet-50 的定义与训练
ResNet-50 的四个阶段的 block 数量为 [3,4,6,3]。
rn = ResNet(dls.c, [3,4,6,3], 4) # 4 表示 bottleneck 扩展倍数换更大的图片:
dls = get_data(URLs.IMAGENETTE_320, presize=320, resize=224)因为网络是 全卷积结构(Fully Convolutional),
所以输入尺寸可以随意变化,模型仍能正常工作。


 浙公网安备 33010602011771号
浙公网安备 33010602011771号