
洛谷P1126 机器人搬重物
P1126 机器人搬重物
题目描述
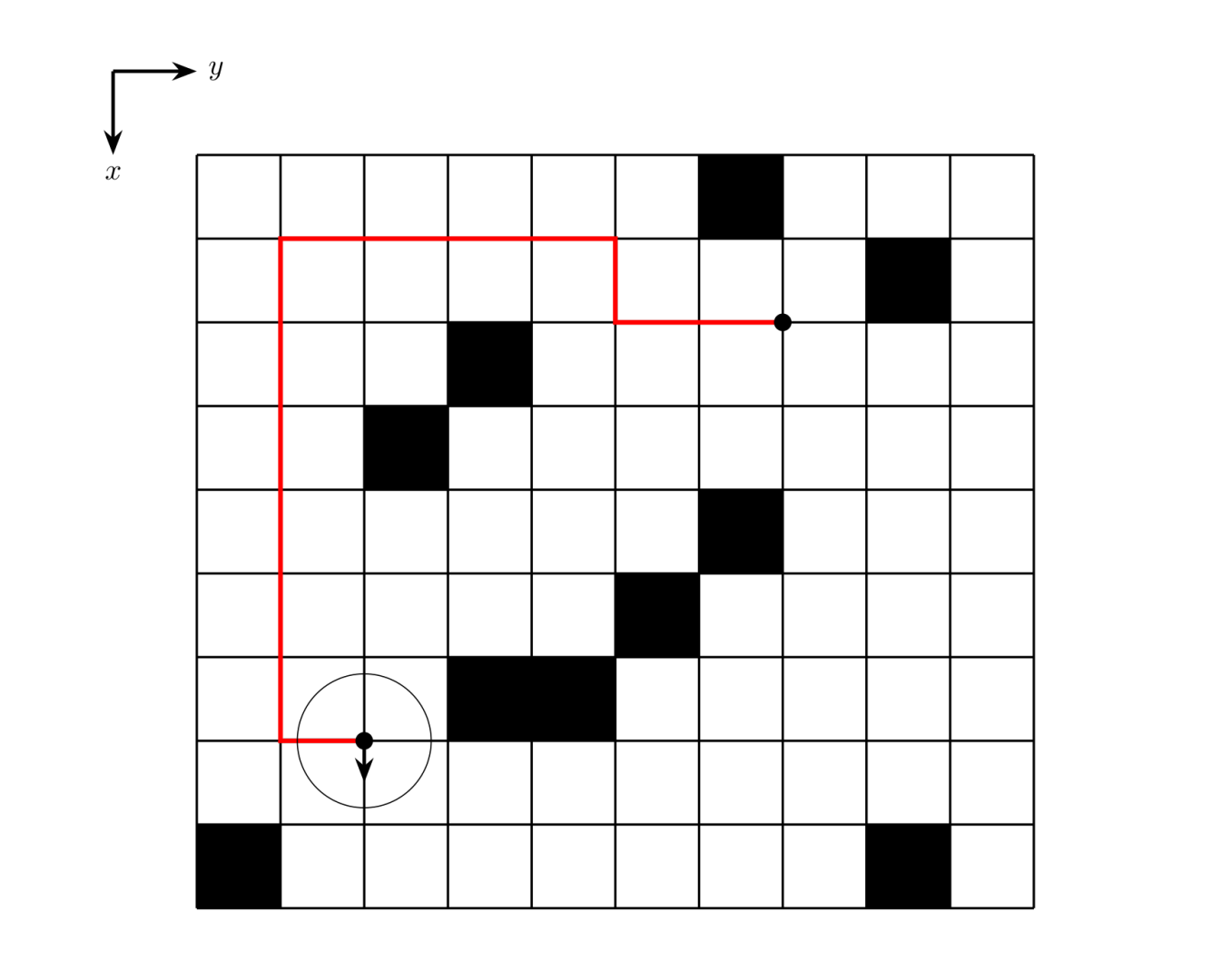
机器人移动学会(RMI)现在正尝试用机器人搬运物品。机器人的形状是一个直径 $1.6$ 米的球。在试验阶段,机器人被用于在一个储藏室中搬运货物。储藏室是一个 $N\times M$ 的网格,有些格子为不可移动的障碍。机器人的中心总是在格点上,当然,机器人必须在最短的时间内把物品搬运到指定的地方。机器人接受的指令有:
- 向前移动 $1$ 步(
Creep); - 向前移动 $2$ 步(
Walk); - 向前移动 $3$ 步(
Run); - 向左转(
Left); - 向右转(
Right)。
每个指令所需要的时间为 $1$ 秒。请你计算一下机器人完成任务所需的最少时间。
输入格式
第一行为两个正整数 $N,M\ (1\le N,M\le50)$,下面 $N$ 行是储藏室的构造,$0$ 表示无障碍,$1$ 表示有障碍,数字之间用一个空格隔开。接着一行有 $4$ 个整数和 $1$ 个大写字母,分别为起始点和目标点左上角网格的行与列,起始时的面对方向(东 $\tt E$,南 $\tt S$,西 $\tt W$,北 $\tt N$),数与数,数与字母之间均用一个空格隔开。终点的面向方向是任意的。
输出格式
一个整数,表示机器人完成任务所需的最少时间。如果无法到达,输出 $-1$。
输入输出样例 #1
输入 #1
9 10
0 0 0 0 0 0 1 0 0 0
0 0 0 0 0 0 0 0 1 0
0 0 0 1 0 0 0 0 0 0
0 0 1 0 0 0 0 0 0 0
0 0 0 0 0 0 1 0 0 0
0 0 0 0 0 1 0 0 0 0
0 0 0 1 1 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
1 0 0 0 0 0 0 0 1 0
7 2 2 7 S
输出 #1
12
根据题目,这也是一个最短路径问题,但是这题重点在于机器人是有方向的,所以我们需要用一个三维数组来表示,
首先定义结构体
typedef struct{ int x,y,dir,step; }Node;
同时不同于其他迷宫题,本题的机器人是一个占地四格的移动目标,已知初始坐标与目标坐标,但是这两个都是这个圆形机器人的四格中的左上角的坐标,同时也要求这四格都要能通过,于是判断合理性稍微复杂
如下
int is_valid(int x,int y){ if(x <= 0 || y <= 0 || x >= n || y >= m)//没有超出边界 return 0; if(map[x-1][y-1] || map[x-1][y] || map[x][y-1] || map[x][y]) //目标周围四个点任意一个为1就说明有障碍无法通过 return 0; return 1; }
获取初始方向调用一个函数即可
int get_dir(char ch) { switch (ch) { case 'E': return 0; case 'S': return 1; case 'W': return 2; case 'N': return 3; } return -1; }
完整代码如下
点击查看代码
#include <stdio.h>
#include <string.h>
#include <stdlib.h>
#define MAXN 51
typedef struct{
int x,y,dir,step;
}Node;
int n,m,i,j;
int map[MAXN][MAXN];
int visited[MAXN][MAXN][4]; //因为有方向所以必须要用三维数组
int dx[4] = {0, 0, -1, 1}; // 四个方向的移动
int dy[4] = {-1, 1, 0, 0};
int is_valid(int x,int y){
if(x <= 0 || y <= 0 || x >= n || y >= m)//没有超出边界
return 0;
if(map[x-1][y-1] || map[x-1][y] || map[x][y-1] || map[x][y])
//目标周围四个点任意一个为1就说明有障碍无法通过
return 0;
return 1;
}
int get_dir(char ch) {
switch (ch) {
case 'E': return 0;
case 'S': return 1;
case 'W': return 2;
case 'N': return 3;
}
return -1;
}
int BFS(int sx, int sy, int ex, int ey, int dir){
Node queue[MAXN * MAXN * 4];
int front = 0, rear = 0;
memset(visited, 0, sizeof(visited));
queue[rear++] = (Node){sx, sy, dir, 0};
visited[sx][sy][dir] = 1;
while(front < rear){
Node now = queue[front++];
if(now.x == ex && now.y == ey)
return now.step; //到达终点返回步数
int ldir = (now.dir + 3) % 4;
if (!visited[now.x][now.y][ldir]) {
visited[now.x][now.y][ldir] = 1;
queue[rear++] = (Node){now.x, now.y, ldir, now.step + 1};
}
// 右转
int rdir = (now.dir + 1) % 4;
if (!visited[now.x][now.y][rdir]) {
visited[now.x][now.y][rdir] = 1;
queue[rear++] = (Node){now.x, now.y, rdir, now.step + 1};
}
for (int k = 1; k <= 3; k++) { //步数从1开始逐渐增大,通过是否超出边界判断步子大小
int nx = now.x + dx[now.dir] * k; //当前坐标加上方向*步数
int ny = now.y + dy[now.dir] * k;
if(!visited[nx][ny][now.dir] && is_valid(nx, ny)){
queue[rear++] = (Node){nx, ny, now.dir, now.step + 1};
visited[nx][ny][now.dir] = 1;
}
}
}
return -1; //无法到达
}
int main() {
scanf("%d %d", &n, &m);
for (i = 0; i < n; i++)
for (j = 0; j < m; j++)
scanf("%d", &map[i][j]);
int sx, sy, ex, ey;
char sdir[2];
scanf("%d %d %d %d %s", &sx, &sy, &ex, &ey, sdir);
int dir = get_dir(sdir[0]);
int result = BFS(sx, sy, ex, ey, dir);
printf("%d\n", result);
return 0;
}

 浙公网安备 33010602011771号
浙公网安备 33010602011771号