Linkage Pathways Tool of the Linkage Mapper Toolbox——part2(完结)
4. 每个步骤在做什么
如上所述,该工具(Build Network and Map Linkages tool)需要1)一个核心区的多边形矢量文件;2)一个阻力的栅格文件;以及3)一个指定核心区多边形之间欧氏距离的文本文件。然后,该工具分5个步骤处理这些数据,如下所示。
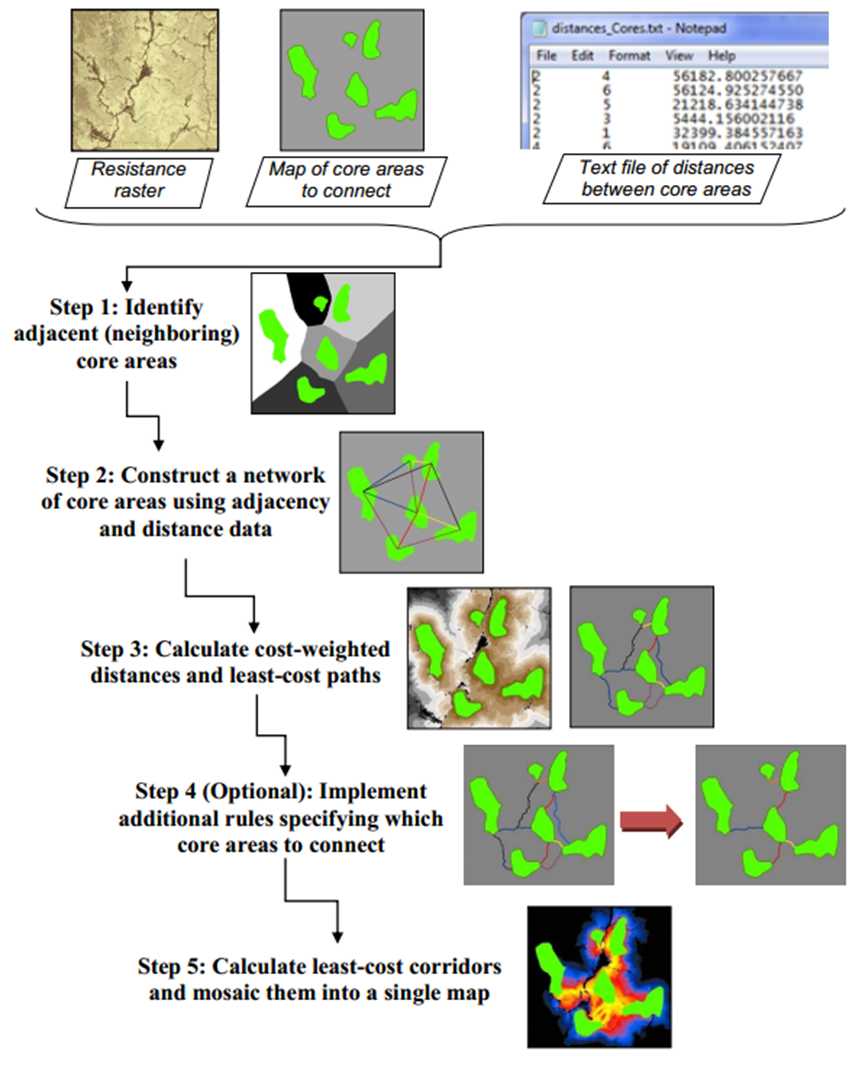
步骤1:确定邻接核心区
输入:核心区多边形文件和阻力栅格文件
输出:以欧氏(直线)和成本加权距离空间中列出相邻核心区的文本文件(euc_adj.csv和cwd_adj.csv)
该步骤使用ArcGIS成本分配和欧氏分配函数确定邻接核心区。ArcGIS使用核心区多边形和阻力栅格创建栅格文件,在欧氏空间或成本加权距离空间中将栅格单元“分配“到最近的核心区。如果从一个核心区到另一个核心区的路径必须经过第三个核心区的分配区域,则认为这两个核心区不相邻。例如,下面的核心区1和6并不相邻,因为如果不至少通过核心区2、4或5的分配区域,就不可能从核心区1到核心区6,此步骤将在你的项目目录中创建一个名为”adj”的子目录,并在其中储存带有邻接和距离数据的栅格。邻接表储存在datapass目录中的文本文件euc_adj.csv和cwd_adj.csv中。
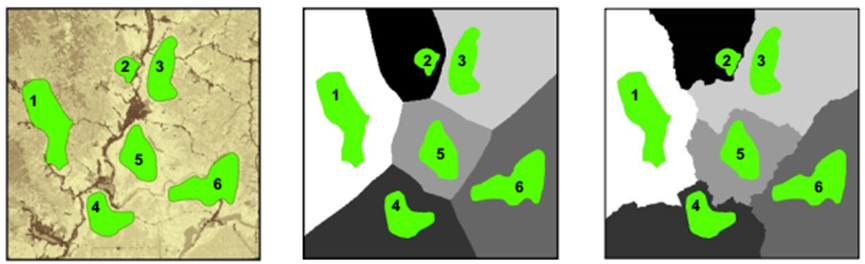
核心区、阻力面和Linkage Pathways教程数据的栅格分配。左:核心区(绿)和阻力面(阻力较低,颜色越浅)。中:欧几里得分配区域,每个核心区有不同的灰度值。右:成本加权距离分配区域。在本例子中,核心区1和3在成本加权距离空间中相邻,但在欧氏空间中不相邻。
步骤2:利用邻接关系和距离数据构建核心区网络
输入:核心区多边形文件、由Conefor inputs生成的距离文本文件(或使用ArcInfo许可的Linkage Pathways)以及核心区邻接文件(euc_adj.csv和/或cwd_adj.csv)
输出:描述网络的文本文件(linkTable_s2.csv)和显示链接的棒图(sticks_s2.shp)
本步骤识别了在步骤1中创建的指定核心区邻接关系的文本文件,以及使用Conefor工具或Linkage Pathways计算的距离。利用这些数据来创建“棒图“(sticks_s2.shp),将作为候选廊道地图的核心区对链接起来。此步骤还可生成linkTable_s2.csv,这是一个可在Microsoft Excel中查看的表格。该表格描述了网络情况并记录了哪些链接处于活动状态哪些被丢弃,以及每个链接的统计信息。这些文件都储存在datapass目录中,并在后续步骤中将被使用和更新版本(linktable_s3.csv等)。它们还保存在run_history目录中以供参考。此步骤可以自动丢弃长度超过最大欧氏距离的链接。

在步骤2中创建的“棒图”(以“sticks_s2.shp形式储存在run_history”目录中)。棒图数字显示了邻接核心区之间的潜在链接,并包括每个区域的信息。在这个例子中,棒的颜色对应于多边形边缘之间的欧几里得(直线)距离。
步骤3:计算成本加权距离和最小成本路径
输入:核心区多边形矢量文件和阻力栅格文件
输出:每个核心区的成本加权距离栅格(储存在cwd目录中),所有核心区的单个成本加权距离栅格,linkTable_s3.csv, lcplines_s3.csv(cwd,储存在output目录中)。
该步骤使用步骤2的核心区多边形、阻力栅格和链接表,对每个核心区进行成本加权距离计算。在创建每个成本加权距离面时,Linkage Pathways还会提取源和目标核心区对之间的最小成本加权距离。该步骤还利用成本加权距离栅格和每个核心区的回溯链接栅格绘制核心区之间的最小成本路径(累积阻力最小的路径)。这一步允许用户自动丢弃最小成本路径经过中间核心区或长度超过指定最大成本加权或欧氏距离的链接。
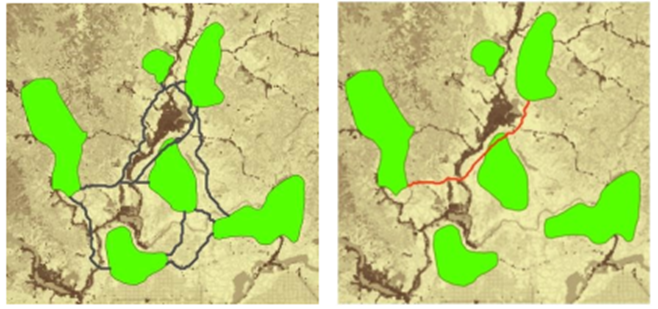
邻接核心区之间的最小成本路径(左)。红色路径(右)穿过中间核心区——如果选中了Drop Corridors that Intersect core Areas复选框,该链接将被丢弃。长度超过指定最大成本加权或欧氏距离的链接也可被自动删除。
步骤3将cwd(显示到最近核心区的成本加权距离的栅格)放入输出目录中。最低成本路径具有各种链接统计信息(如上图所示,该链接所遍历的总成本加权距离)。
使用边界圆框选项最小化处理时间
使用边界圆框可以大大加快计算速度。Linkage Pathways首先计算围绕“源”和”目标”核心区对的边界圆框。然后,用源核心区的所有边界圆框的联合加上一个足够大的缓冲区进行裁剪,使廊道有足够的空间进行“漫游”。如,下图显示的缓冲距离为10千米(在工具箱“附加选项”部分的”边界圆框缓冲距离“中输入10000个地图单元)。这限制了每个源核心区的成本加权距离计算,使其只包括可能与源核心区和目标核心区之间连通性相关的景观部分,从而减少了处理时间。
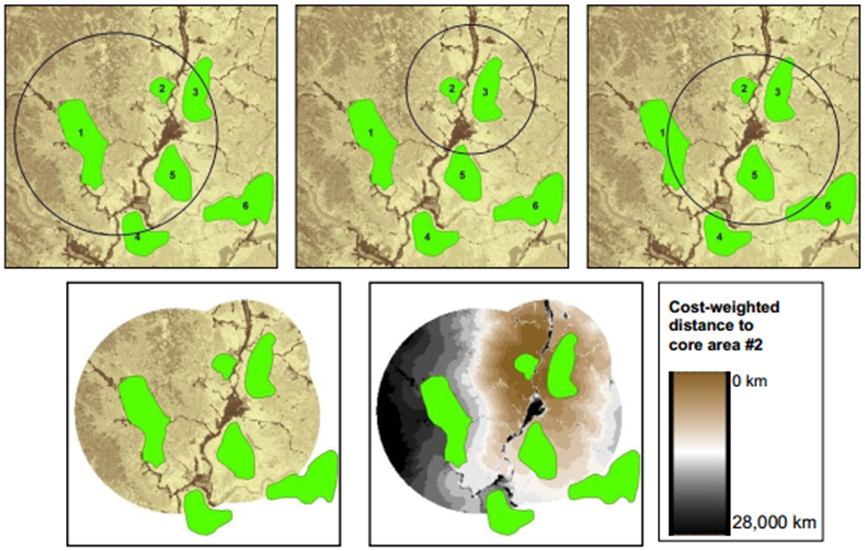
为核心区2计算的边界圆框。上图:圆框包括核心区2和各自的目标核心区(1,3,5),外加缓冲距离.左下:在进行任何核心区的成本加权距离计算时,算法提取了包含该核心区的所有圆框的并集内的阻力部分。右下:从核心区2计算的成本加权距离。注意:如果不确定缓冲区距离,建议使用较大的值或跳过。但是对于具有数百个核心区的大型数据而言,处理时间可能会迅速增加。
步骤4:实施可选规则指定要连接的核心区
输入:linkTable_s3.csv, lcplines_s3.shp
输出:linkTable_s4.csv, sticks_s4.shp, lcplines_s4.shp
该步骤可让你选择将每个核心区连接到与其最近的1-4最近邻域,然后再根据需要将不相连的集群(星座)连接起来。后者将核心区的集群连接起来,从最近的开始,直到所有集群连接在一起(只要它们在最大廊道长度内,如有指定)。你可以用欧氏距离或成本加权距离来衡量“最近”。
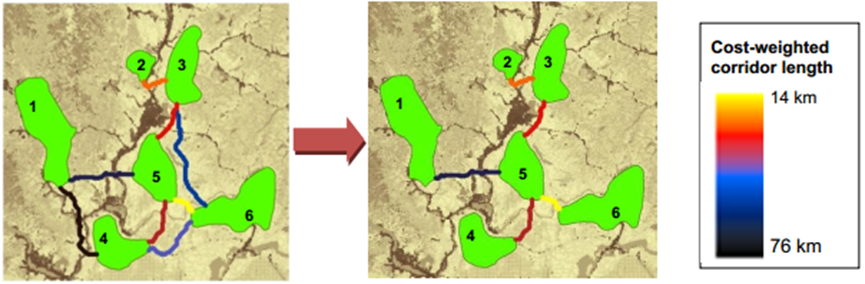
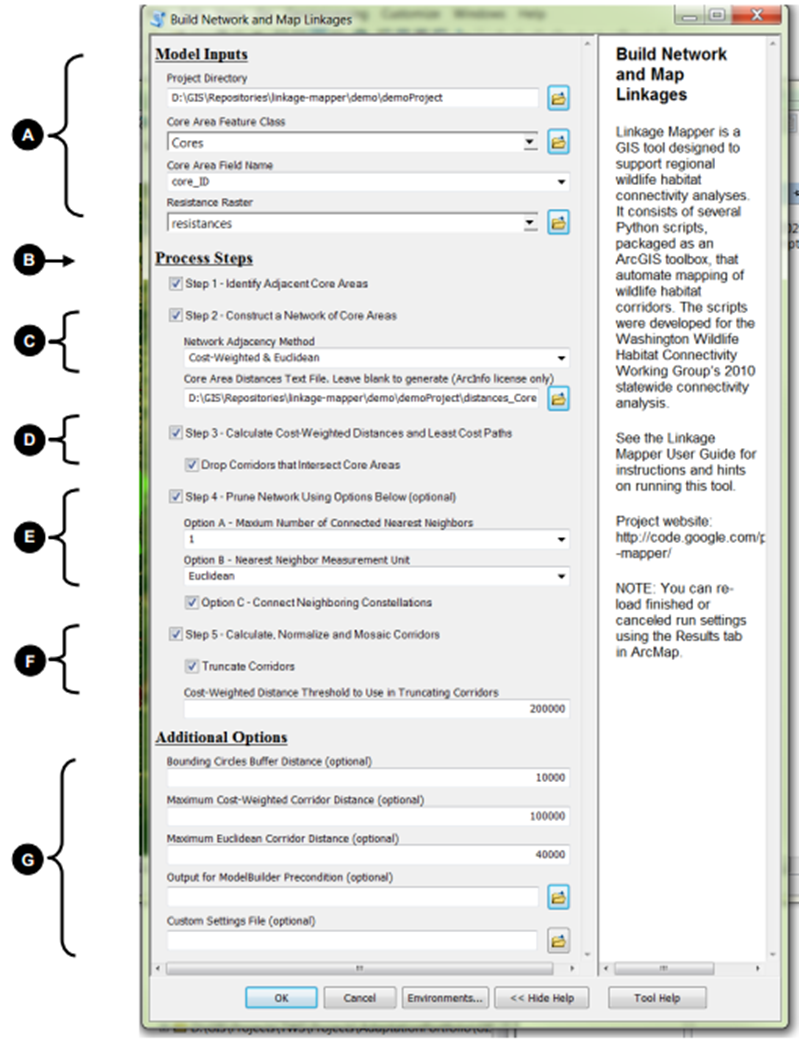
步骤4表明了在将每个核心区以成本加权距离单位连接到最近的邻域(步骤4选项A=1),然后连接不相交的集群(步骤4选项C)的选项下运行时如何改变网络。在这种情况下,形成两个集群,最北的两个核心区构成一个集群,其余四个核心区构成另一个集群。核心区3和5之间的链接连接了两个集群,形成了一个单一的连接网络。
步骤5:计算最低成本廊道,并将它们镶嵌在一张图上
输入:: linkTable_s4.csv or linkTable_s3.csv; cost-weighted distance rasters; lcplines_s4.shp (if
present in datapass directory) or lcplines_s3.shp.
输出:最终产品包括linkTable_s5.csv(储存在output目录中),以及最终的链接地图和最小成本路径要素类(储存在output目录下的corridors.gdb和link_maps.gdb中)
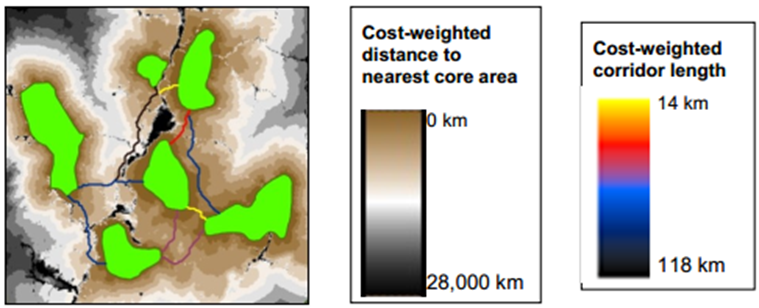
该步骤计算了最低成本廊道(从每对相连的核心区计算出的成本加权距离栅格的总和)。它还通过从原始廊道中减去最低成本路径距离归一化最低成本廊道。
NLCCAB是连接核心区A和B的归一化最小成本廊道,CWDA是从核心区A的成本加权距离,而CWDB是从从核心区B的成本加权距离,LCDAB是连接核心区对的理想(最低成本)路径累积的成本加权距离。该步骤以相同的“价值”可视化所有廊道。每个归一化廊道中的栅格单元值的范围从0(最低成本)开始。单元值仍以成本距离为单位,反映了每个单元的核心区之间的(局部最优)路径相对于连接核心区对的(全局最优)最低成本路径的成本高低。在计算归一化廊道时,步骤5使用ArcGIS的镶嵌功能将其合并为一张图,以创建一张复合链接图,其中每个单元格代表所有单独归一化廊道图层的最小值。
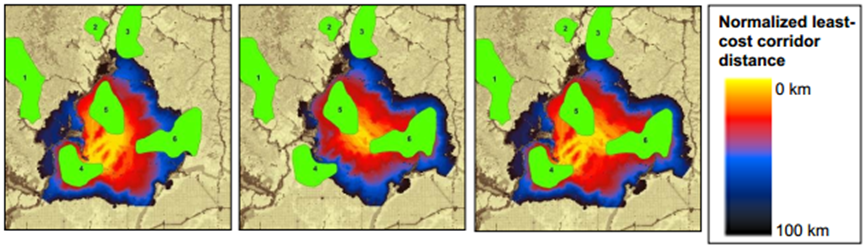
归一化最低成本廊道的合并过程。仅以两条廊道为例。左图和中间的图分别显示了连接核心区4到核心区5和6的归一化最低成本廊道。颜色表示核心区对经过每个单元的路径相对于连接核心区对的最低成本路径要高多少。Linkage Pathways使用归一化廊道的最小值创建复合地图(右图)。
此步骤还将写入最终的棒图和LCP图,分为活动的或者非活动的链接和LCP。非活动链接是指那些根据用户标准被删除的链接。它创建的最终链接表只包括活动链接。最终链接表有附加信息的额外一列,包括lcpLength (最低成本路径的非加权长度)、cwdToEucRatio(成本加权距离与核心区之间欧氏距离的比率)和cwdToPathRatio(成本加权距离与最低成本路径的非加权长度之比,即沿着路径移动的距离)。最后,此步骤创建了地理数据库(link_maps.gdb和corridors.gdb),其中包含最总的LCP和链接要素类以及镶嵌的最低成本廊道地图。
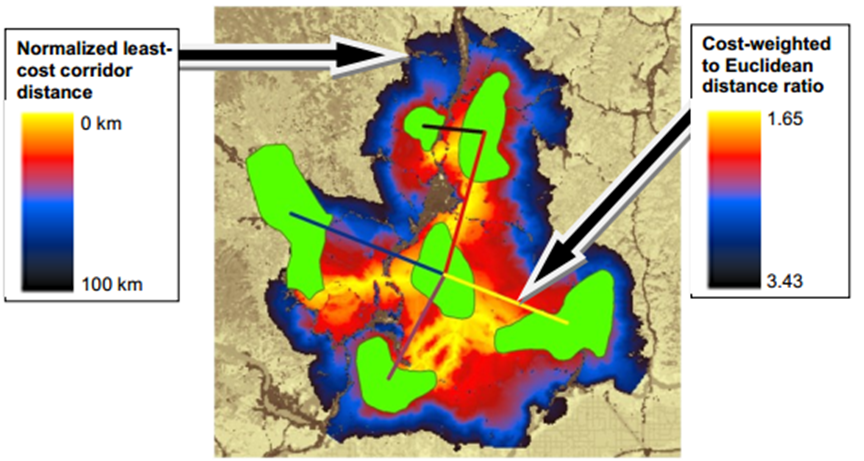
使用教程数据(保存在corridor.gdb中)对最低成本廊道进行归一化和镶嵌。黄色栅格单元更靠近廊道中心,深蓝色栅格单元显示的是累积成本加权距离超过最优(最低成本)路径100千米的路径。链接的颜色表示成本加权距离与欧氏距离的比率(要素类的cwd2Euc_r字段),是衡量廊道质量的指标。黄色链接表示核心区之间单位欧氏距离累积成本最低的链接,而黑色则表示累积成本最高。
5. 其他(提示或故障排除)
5.1保存和重新加载运行设置
ArcMpa自动保存以前运行的设置,可以使用results选项重新加载它们。相关说明可参阅ArcGIS帮助。你可以通过取消选中你希望开始的步骤之前的步骤,重新开始失败的运行(或使用不同的参数选择从任何步骤开始重新运行)。无线删除输出文件,它们将自动覆盖。
5.2缩放阻力值
创建阻力图和核心区图是连通性分析中最棘手的部分,而执行此操作的方法超过了本手册的范围。不过,你会发现将最小阻力值设为1较好,这样通过“理想”栖息地的成本加权移动距离就等于欧几里得移动距离,连通性统计也会变得有意义,因为它们可以与完全连接的经过中的预期值进行比较。我们通常建议最大阻力至少为100,而用户通常会使用1000或10000。
5.3将Linkage Pathways应用于大型研究区、大型核心区和大量核心区
在对大型项目或研究区应用Linkage Pathways之前,我们建议在一个具有有限核心区的小区域内进行测试,这将有助于了解Linkage Pathways的工作原理,以及哪种参数组合能提供最符合目标的结果。请注意,较大的核心区可能会导致Linkage Pathways在步骤2中花费数小时甚至数天的时间计算欧几里得距离。这是ArcGIS 生成近邻表算法的限制,我们用它计算核心区之间的距离。
5.4手动删除或保留链接
可以通过编辑datapss目录下的一个linkTable文件手动删除链接。例如,要在步骤4运行前删除链接,请编辑linkTable_s3.csv并将“linkType”列中的链接值设置为-100。然后从步骤4开始运行Linkage Pathways此时只需检查步骤4和步骤5。linkType值为负的链接将自动被丢弃,而-100将被保留在用户删除的链接中。
为了保留因欧氏长度或成本加权长度而被丢弃的链接。首先在不使用最大距离的情况下通过步骤3运行Linkage Pathways。然后编辑linkTable_s3.csv,并将“linkType”列中的链接值设置为100。然后就可以应用最大距离,而该链接的最大距离将被忽略。
5.5释放磁盘空间
Linkage Pathways为每个核心区创建了成本加权距离栅格,这将会占用大量磁盘空间。一旦对最终结果满意,要释放磁盘空间,可删除datapass目录下的cwd文件夹(删除cwd栅格实用程序可执行该操作)。删除后,如果你想用修改后的输入设置生成新的廊道,需要重新运行步骤3。
5.6结合Linkage Pathways和Circuitscape优先考虑连通性保护
电路理论可以补充最低成本分析,并有助于有限考虑连通性保护的重要区域。Pinchpoint Mapper工具将在Linkage Pathways的输出中自动运行Circuitscape,以获得两种方法的最佳效果。如下所示(参见Linkage Mapper下载中包含的Pinchpoint Mapper用户指南)。
电路理论用于识别和有限考虑连通性保护重要区域的例子。(A)简单景观,有两个连接的斑块(绿色),由一个因分散而阻力变化的基质隔离开(白色为低阻力,深色为高阻力,黑色为完全阻碍。)(B)斑块之间的最低成本廊道(黄色为最低阻力路径,而蓝色为最高)。(C)利用Circuitscape得出的相同两个斑块之间的电流,最高电流密度用黄色表示。电路分析通过识别重要的替代路径和夹点对最低成本路径的结果进行补充,而在这些地方小范围的损失会不成比例第损害连通性。(D)一个有前景的应用是将电路分析限制在最低成本廊道的切片上,以同时利用这两种方法的优势。这种混合的方式既可以显示最有效的移动路径和其中的关键夹点(用黄色显示)。这些区域可优先于对连通性贡献不大的区域,如右上角深蓝色“无处可去的廊道”。
5.7常见问题
某些程序可能与ArcGIS发生冲突并导致错误。杀毒软件也会经常导致某些问题(如AVG)。写入Dropbox文件夹也会导致错误。显然,这些程度试图在ArcGIS访问文件的同时访问文件,而它们不兼容。因此暂时禁用杀毒软件(可能很难完全禁用—你必须确保它们不在后台运行)和暂停Dropbox同步可以解决这些问题
5.8在步骤3中ArcGIS崩溃时进行恢复
当涉及到文件锁定和清理时,ArcGIS仍存在一些严重的错误。在处理大量核心区时,这可能导致,步骤3的某些地方的崩溃。
要重新启动Linkage Pathways在步骤3中停止的地方(请参阅下面的警告):
1)检查步骤2
2)在核心区距离文件中输入“restart”(没有引号,只输入restart这个词)
3)取消选中步骤2(如果选中了步骤1,则取消选中)。确保检查了步骤3.
4)点击运行。Linkage Pathways应该会重新启动。
警告:只有当你向快速获得廊道地图时才可以使用这个工具。因为你的LCP和stick要素类会失去在工具停止之前创建的LCP。但最终的栅格廊道图应该是完整的。如果可能,我们建议从第三步开始运行(不使用“restart”功能),并采取措施避免ArcGIS出错,例如用ArcCatalog而不是ArcMap运行。
5.9有用的实用程序和访问其他选项
请参阅“Utilities”工具集,了解将廊道裁剪为所需宽度、减小阻力栅格分辨率以及当运行完廊道地图后删除占用大量空间的临时CWD文件。这些实用程序没有单独的文档,单击工具箱对话框中的显示帮助,查看不同输入和设置的说明。熟悉Linkage Pathways后,可以通过编辑lm_settings.py(位于工具箱/scripts目录下)来更高一些设置,例如默认的廊道宽度或是否使用核心区之间的最小距离。
5.10更新
对于从早期版本的Linkage Mapper升级到2.0.0的版本的用户,请考虑以下事项:如果希望之前的项目自动使用新版本的Linkage Mapper和Linkage Pathways,请将工具箱安装在与之前版本相同的位置。由于在Linkage Mapper工具对话框中添加了新的Linkage Mapper参数,从地理处理结果历史记录中运行Linkage Mapper时会出现“ERROR 000820 parameters need repair“。要解决这个问题,请从工具箱中运行Linkage Mapper,而不是从地理处理历史中。调用LM的ModelBuilder(模型构建器)需要编辑、重新验证和保存。
6. 文献引用
Beier, P., W. Spencer, R. Baldwin, and B.H. McRae. 2011. Best science practices for developing regional connectivity maps. Conservation Biology.
McRae, B.H., B.G. Dickson, T.H. Keitt, and V.B. Shah. 2008. Using circuit theory to model connectivity in ecology, evolution, and conservation. Ecology 10: 2712-2724.
McRae, B.H., and Shah, V.B. 2009. Circuitscape User’s Guide. ONLINE. The University of California, Santa Barbara. Available at: http://www.circuitscape.org.
Sawyer, S., C. Epps and J. Brashares. 2011. Placing linkages among fragmented habitats: do least-cost path models reflect how animals use landscapes? Journal of Applied Ecology 48:668-678.
Washington Wildlife Habitat Connectivity Working Group (WHCWG). 2010. Washington Connected Landscapes Project: Statewide Analysis. Washington Departments of Fish and Wildlife, and Transportation, Olympia, WA. Available at: http://www.waconnected.org.
7. Linkage Pathways教程
我们提供了一个压缩目录,其中包括一个ArcGIS项目(LM_Demo.mxd)和两个示例GIS图层:
核心区矢量文件(cores.shp):多边形矢量文件,定义要连接的栖息地或自然景观区块。在这种情况下,我们使用的数据大多是虚构的、松散的,基于华盛顿州东北部尖尾松鸡栖息地的数据。
阻力栅格:表示通过每个栅格单元的难度或能量成本的栅格文件。数值越大,移动难度越大。

1)将demo目录放在易于浏览的地方,目录名称中不要有空格或者特殊字符(例如:C:\demo)。本教程的项目目录位于demo\demoProject。
2)在ArcMap中打开LM_Demo.mxd
3)打开Linkage Mapper工具箱,点击Build Network and Map Linkages。将出现以下对话框:
4)输入以下内容(参考上图对话框中的字母):
A.输入数据
项目目录:浏览到放置demo目录的位置选择其中的demoProject目录。
核心区要素类:选择Cores
核心区字段名:选择core_ID
阻力栅格:选择resistances
B.检查所有步骤
C.步骤2-建立核心区网络
核心区距离文本文件:浏览到放置demo目录的位置,并在其中打开demoProject目录。选择distances_cores.txt(如果有ArcInfo许可证,可将此处留空,它会生成一个距离文件,并将它放置在你的项目目录中)
网络邻接法:选择成本加权和欧氏距离
D.步骤3-计算成本加权距离和最低成本路径
删除与核心区相交的廊道:勾选此框
E.步骤4-删除网络
最近领域的数量:选择1
最近邻测量单位:选择欧几里得距离
连接邻近集群:选中此框
F.步骤5-计算最低成本廊道和将其合并到一张图中
截断廊道:勾选此框
使用的成本加权距离阈值:输入200000
G.附加选项
边界圆框缓冲距离(可选):输入10000(相当于10km)
最大成本加权廊道距离:输入100000
最大欧几里得廊道距离:输入40000
点击OK。你可以在LM_Demo_Results.mxd中查看输出结果。
警告:当在同一个项目目录下再次运行该模型时,一些ArcMap的设置很难覆盖到所有的Linkage Pathways的输出。在这种情况下,使用ArcCatalog,或者每次运行都创建一个新的子目录。
左上是使用上述设置在步骤3之后显示活动链接的网络(中间的shp输出结果储存在run_history目录中)。黄色廊道的成本加权距离最小,而黑色廊道的成本加权距离最大。注意:核心区1和2之间的廊道因为太长(以成本加权距离单位计算为118千米)而被丢弃。链接被删除的原因可通过查询stick或lcp矢量文件来确定。右上为运行步骤4后的网络。每个核心区都与最近的核心区相连,核心区3和5之间的链接连接了两个不相连的核心区集群。

左上:由上诉设置产生的归一化和镶嵌后的最低成本廊道(在corridors.gdb中的demProject_corridors中)。只显示了0-100000之间的值。右图:使用Linkage Mapper Utilities工具集将廊道裁剪成5千米的成本加权“宽度“截断。对于连通性宽度截断的描述见WHCWG的第2章。
本文来自博客园,作者:{shanmuxi},转载请注明原文链接:https://www.cnblogs.com/shanmuxi/articles/18396684

 浙公网安备 33010602011771号
浙公网安备 33010602011771号