Linkage Pathways Tool of the Linkage Mapper Toolbox——part1
Linkage Pathways Tool of the Linkage Mapper Toolbox
1. 引言
该工具是用于支持区域野生动物栖息地连通性分析的GIS工具,包括几个python脚本,被打包成了一个ArcGIS工具箱,可以自动绘制野生动物栖息地廊道。
链接路径使用核心栖息地区域的矢量图和移动阻力的栅格图来识别和绘制核心区域最低成本的栖息地廊道。阻力图中的每个单元都具有一个值,反映了穿过该单元的能量成本、难度或死亡风险。阻力值通常由单元特征(如土地覆被、居住密度)与特定的景观阻力模型相结合而确定。当动物远离特定的核心区域,成本加权距离分析就会产生累积的总移动阻力图。脚本使用ArcGIS和Python函数识别邻接的核心区域,并创建它们之间成本最低的廊道图。然后脚本将各个廊道地图归一化并镶嵌在一起,创建一个单一的复合廊道图。结果显示了每个栅格单元在提供核心区之间的连通性方面的相对价值,使用户能够确定哪些路线会遇到更多或更少的特征,从而促进或阻碍在核心区之间的移动。
Linkage Pathways的开发目的是将连通性模型中一些艰巨而耗时的步骤自动化。不过即便有了这些工具,连通性建模仍需要大量的研究,数据整理、GIS分析以及对结果的细致解读。核心区的定义、阻力模型的参数化以及您需要做出的其他建模决策都非同小可。在深入研究之前,我们强烈建议用户通过查阅已出版的资料来全面熟悉连通性建模的过程和挑战。可参考的资料包括Corridor Designer website (http://corridordesign.org/designing_corridors), WHCWG (2010), Beier et al. (2011), and references listed within. See Sawyer et al. (2011) for a critique of current corridor modeling practices.
2. 软件安装
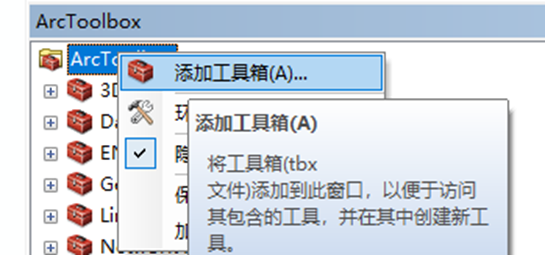
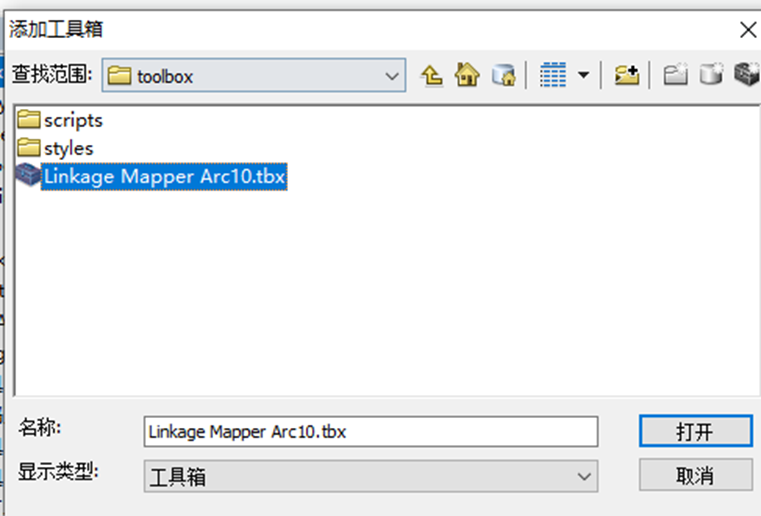
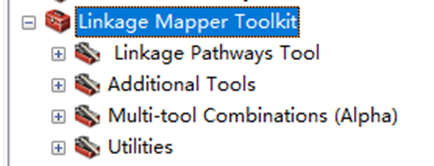
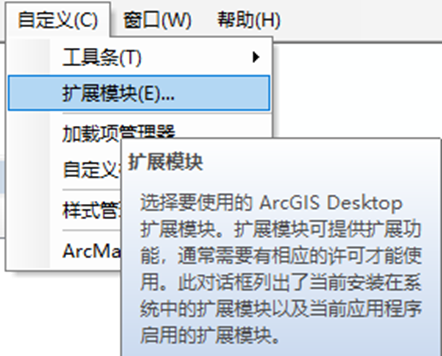
1)从网站下载Linkage Mapper: http://www.circuitscape.org/linkagemapper。打开下载的安装包文件,然后将该文件放在路径中没有空格或特殊字符的文件夹里。关闭所有的ArcGIS应用程序然后启动ArcCatalog. 如果ArcToolBox窗口不可见,通过点击Geoprocessing(地理处理)-ArcToolbox 。从刚刚保存的目录中添加Linkage Mapper工具箱。如下:右击ArcToolbox,然后点击添加工具箱,然后选择解压后的Linkage Mapper目录下的toolbox,然后点击Linkage Mapper 10.tbx。确保扩展工具中的空间分析已激活。
2)如果你没有ArcInfo级别的许可证,需要安装Conefor Inputs Tool。首先从网站下载Conefor inputs: http://jennessent.com/arcgis/conefor_inputs.htm。在该软件下载ArcGIS对应版本的Conefor inputs安装包,然后解压,找到Conefor_Inputs_10.exe的应用程序,双击进行安装,然后一直点next,直到弹出安装路径,选择自己的路径(尽量非中文,非空格和特殊符号的文件夹),安装完毕后关闭窗口。

Register_Conefor_ID.bat文件以管理员身份运行弹出安装成功即可。若没有该bat文件,则先以管理员身份运行Make_Batch_Files应用程序,就会出现该bat文件。而安装ArcGIS的Conefor_Inputs_10插件则需要打开自定义的自定义模式,点击从文件添加,添加Conefor_inputs2.dll文件。右击ArcGIS页面上方空白区域,则可显示Conefor工具。
3)确保安装了GIS和Python所需软件。Linkage Mapper需要带有空间分析的ArcGIS9.3或10的版本,同时需要Python2.5,2.6或2.7以及Numpy包,它们是由ArcGIS自动安装的。
3. 软件使用
3.1输入数据要求
输入Linkage Pathways的数据包括1)核心区多边形矢量文件;2)GIS的阻力栅格文件;以及3)核心区多边形之间欧几里得距离的文本文件,该文件通常由Conefor inputs工具生成,输入数据是核心区多边形矢量文件。如果有ArcInfo许可证,可由Linkage Pathways自动生成。 注意:确保核心区矢量文件和阻力栅格文件具有同样的投影,且强烈建议地图单位为米。
3.2数据和工作空间的准备
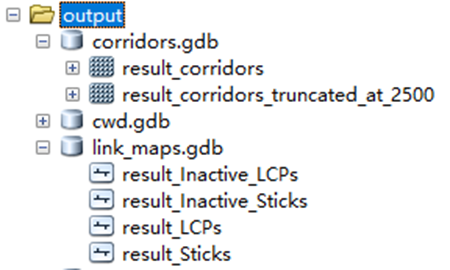
首先需要建立项目文件目录,即创建文件夹,这个文件夹是中间过程文件和结果输出文件写入的地方,目录尽量为本地磁盘的根目录((类似于C:\ANBO)),路径中不应有空格和特殊字符。且应该为运行的每个项目创建唯一的文件目录,以免混淆。其次利用Conefor inputs工具创建一个欧几里得距离文件。当软件运行完成将在文件目录中创建几个子目录,包括最终的输出目录。数据在datapss目录中的计算步骤中传递。脚本还创建带有廊道信息的矢量线地图(在datapass目录和输出目录output中的link_maps地理数据库中)以及栅格廊道地图(储存在corridor的地理数据库中)。Link_maps的分步骤版本在完成后被移动到run_history目录中,该目录中还包括一个日志目录用于储存运行信息。
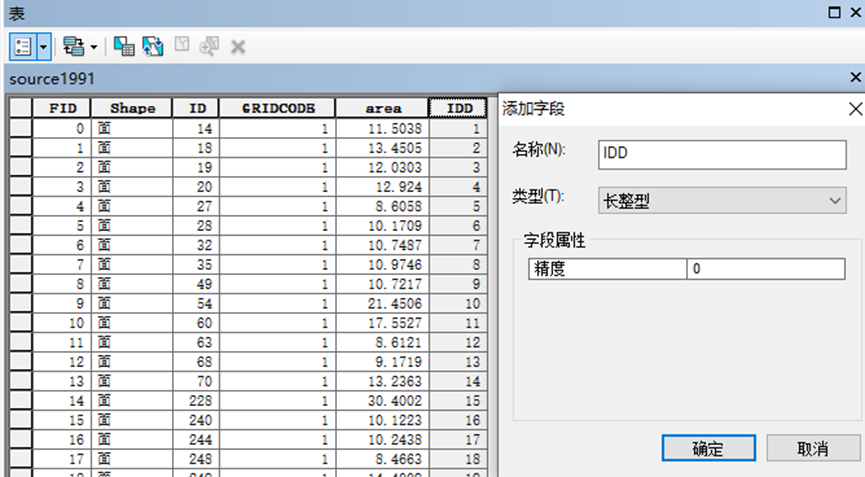
利用Conefor inputs工具创建一个欧几里得距离文件需要知道:Conefor inputs可测量核心区每对之间的最小欧式距离,我们仅使用该工具生成核心区对和它们之间距离的文本文件。该工具可让你选择分析所有核心区对或只分析指定距离内的核心区对。当处理大量特定物种的核心区时,将分析范围限制在指定距离内尤其有用。如果已知某一物种只分散X个地图单元,并且您希望绘制小于X长度的链接,且如果核心区过多,将分析范围限制在指定距离可以节省计算时间。注意:最好创建新的一列ID属性。且如果选择属性为面积,需要提前对核心区的面积进行计算(新建字段“面积”,然后计算几何)。输出的文件是ASCII文件,使用记事本打开。


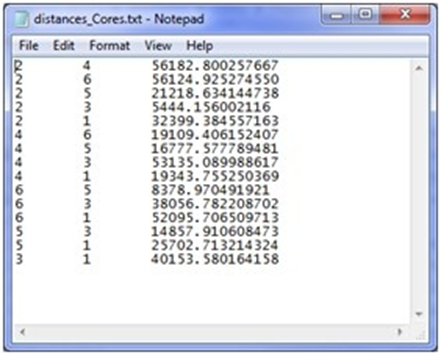
该文件显示核心区对之间的欧几里得距离。

3.3运行工具箱
关闭ArcGIS Map,打开ArcCatalog,运行Linkage Mapper Toolkit工具下的Build Network and Map Linkages。
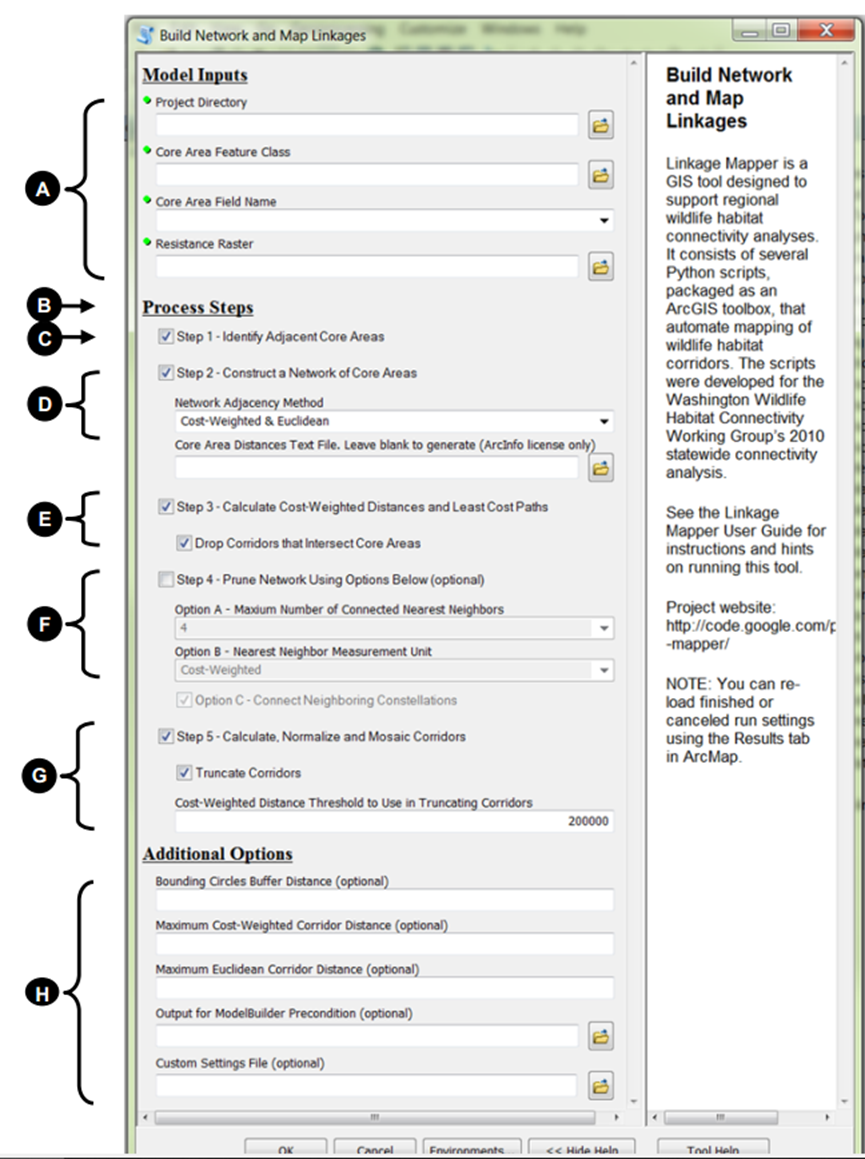
- 输入数据:
a.project directory(项目目录):为运行的每个项目创建唯一的项目目录,以免混淆。
b.Core Area Feature Class(核心区要素类):在这里选择核心区多边形的矢量文件。
c.Core Area Field Name(核心区字段名):字段必须由<9999的正整数组成,用于核心区多边形的唯一标识。
B.检查你想要完成的步骤。你可以检查从开始到结束的所有步骤。你还可以在流程中的任何步骤重新启动识别或被终止的运行。注意:步骤4是可选的。如果你只想将每个核心区连接到其1-4个最近的邻域,请选中步骤4并填写步骤4的选项,然后将核心集群连接在一起,而不是连接所有邻接的核心区。有关每个步骤的详细信息,请参阅下文第 4 节。
C.步骤1-识别邻接的核心区
D.步骤2-构建核心区网络
a.网络邻接法:指定是否在欧几里得距离和/或成本加权距离空间中的核心区之间建立链接。如果同时选择这两种方法,则将在欧氏距离或成本加权距离空间中邻接的核心区之间构建廊道。
b.核心区距离文本文件:输入由Conefor inputs工具生成的距离文本文件(拥有ArcInfo许可证的用户可以不用,因为Linkage Pathways会创建)。这可能毕竟耗时,因此如果使用相同的核心文件重新运行,请确保加载先前Linkage Pathways已经创建的文本文件(以”dists.txt”结尾),该文件可在你的项目目录中找到。
E.步骤3-计算成本加权距离和最小成本路径
a.删除与核心区相交的廊道(即删除穿过源地的廊道),这将在步骤3中生效。请参阅下面第4节的详细描述。
F.步骤4-修剪网络
你可以限制廊道的数量确保每个核心区与其1-4个最近邻域相连所需的数量范围内(然后可以选择链接下面任何不相交的核心区“星座”)
连接的最近邻域的数量:如果选中步骤4,该选项可让你选择每个核心区连接的最近邻域的数量。将每个核心区连接到其N个最近邻域的任何不需要的链接都将被丢弃。选择“无限制“将允许连接到所有邻接核心区。
最近邻域测量单位:选择是以欧氏距离还是成本加权距离来衡量“最近“。
连接邻接星座:将每个核心区连接到其N个最近邻域的任何不需要的链接删除后,此选项可让你重新添加连接最近的成对核心区”星座”(即离散的邻接核心区集群)的链接,直到所有星座都连接起来。
G.步骤5:计算、归一化和马赛克廊道
a.截断廊道:选中后,创建project_corridors输出的副本,将成本加权距离值高于下面指定的阈值转换为NoData.
b.截断廊道使用的成本加权距离阈值:与上述 “截断廊道 ”选项一起使用的阈值。
H.附加选项
a.边界缓冲距离(可选):如果输入一个值,则会在成对的核心区周围创建缓冲区(用于提高速度的建议将在下面第4节的详细描述中)。缓冲区距离以地图单位输入,如地图单位以m为单位,则将10公里缓冲区输入为10000。如果不想使用边界缓冲距离则留空。
b.最大廊道距离:最大距离可以通过去除过长的廊道从而加快计算速度。如果不确定应留空或高估。你可通过重新运行步骤5来增加距离。如果不回到步骤2则无法缩短距离。
i.最大成本加权廊道距离(可选):如果你只想绘制最大成本加权廊道长度的廊道,请在此处输入(以地图单位为单位),这将在步骤3-5中生效。
ii.最大欧几里得廊道距离(可选):如果你只想绘制核心区之间距离小于一定距离的廊道,请在此处输入(以地图单位为单位),这将在步骤2-5中生效.
注意:最小成本廊道仍然可以长于此距离,因为它们通常会比它们所连接的核心对之间的边缘到边缘的距离长很多。(这里的意思是最小成本廊道穿过核心区,而这个距离则是核心区边缘到边缘的距离,因此最小成本廊道仍然可以长于此距离)
c.ModelBuilder Precondition(先决条件)的输出(可选):创建输入核心区的可选输出副本,可在模型构建器流程中使用,以表明LP已经完成处理。
d.自定义设置文件(可选):一个可选的.py文件,用于替代lm_settings.py,便于保存重现场景运行的所有设置。
本文来自博客园,作者:{shanmuxi},转载请注明原文链接:https://www.cnblogs.com/shanmuxi/articles/18395613

 浙公网安备 33010602011771号
浙公网安备 33010602011771号