
矩阵变换在坐标系中的应用


数学仿真工具 MathLabTool 开发者
来自专栏 · 矩阵
3 人赞同了该文章
展开目录
前言
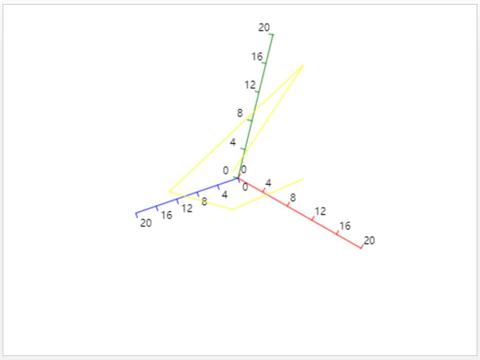
以三维坐标系为例,应用矩阵变换进行坐标平移、缩放、旋转。
原理
对于坐标变换,需要引入齐次坐标的概念。
齐次坐标是将一个原本是n维的向量用一个n+1维向量来表示。
借用F.S. Hill Jr.的一句话来解释为何要引入齐次坐标,“齐次坐标表示是计算机图形学的重要手段之一,它既能够用来明确区分向量和点,同时也更易用于进行仿射(线性)几何变换。”。
其中的几何变换,正是我们需要应用的场景。
这里我们用的是行向量,左乘行变换,右乘列变换。
平移
平移变换的计算,乘一个平移矩阵,可以表示为如下方式:
[𝑥𝑦𝑧1]⋅[100001000010𝑥′𝑦′𝑧′1]=[𝑥+𝑥′𝑦+𝑦′𝑧+𝑧′1]
原坐标(x, y, z)分别平移x', y', z'后,坐标变为(x+x', y+y', z+z')。
缩放(整体)
缩放变换的计算,乘一个缩放矩阵,可以表示为如下方式:
[𝑥𝑦𝑧1]⋅[100001000010000𝑠]=[𝑥𝑠𝑦𝑠𝑧𝑠1]
原坐标(x, y, z)缩放s倍后,坐标变为(x/s, y/s, z/s)。
旋转(绕坐标轴)
旋转变换的计算,乘一个旋转矩阵,x, y, z坐标轴分别表示为:
绕x轴
[𝑥𝑦𝑧1]⋅[10000𝑐𝑜𝑠𝜃𝑠𝑖𝑛𝜃00−𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜃00001]=[𝑥𝑦⋅𝑐𝑜𝑠𝜃−𝑧⋅𝑠𝑖𝑛𝜃𝑦⋅𝑠𝑖𝑛𝜃+𝑧⋅𝑐𝑜𝑠𝜃1]
绕y轴
[𝑥𝑦𝑧1]⋅[𝑐𝑜𝑠𝜃0−𝑠𝑖𝑛𝜃00100𝑠𝑖𝑛𝜃0𝑐𝑜𝑠𝜃00001]=[𝑥⋅𝑐𝑜𝑠𝜃+𝑧⋅𝑠𝑖𝑛𝜃𝑦𝑧⋅𝑐𝑜𝑠𝜃−𝑥⋅𝑠𝑖𝑛𝜃1]
绕z轴
[𝑥𝑦𝑧1]⋅[𝑐𝑜𝑠𝜃𝑠𝑖𝑛𝜃00−𝑠𝑖𝑛𝜃𝑐𝑜𝑠𝜃0000100001]=[𝑥⋅𝑐𝑜𝑠𝜃−𝑦⋅𝑠𝑖𝑛𝜃𝑦⋅𝑐𝑜𝑠𝜃+𝑥⋅𝑠𝑖𝑛𝜃𝑧1]
仿真
编辑于 2025-02-22 13:55・广东
漫思


 浙公网安备 33010602011771号
浙公网安备 33010602011771号